一种工件自动加工装置的制作方法
1.本发明属于五金工具加工领域,具体涉及一种工件自动加工装置。
背景技术:
2.扳手是一种常用的安装与拆卸工具,是利用杠杆原理拧转螺栓、螺钉、螺母和其他螺纹紧持螺栓或螺母的开口或套孔固件的手工工具,由固定的扳手本体和活动的扳口,扳口上开设有齿牙,能够通过扳手本体上的蜗杆与齿牙的配合,调整扳口与扳手本体之间的距离。
3.现有技术对扳口工件的加工,是工人拿工件放入夹具内夹紧后加工,加工完再把工件拿出来,工作效率低,劳动强度大,危险系数高,并且会对自动加工的节奏产生影响。
技术实现要素:
4.针对上述问题,本发明提供了一种工件自动加工装置,实现全自动上料、工件加工、下料,加工效率显著提高,减少了生产中的人力成本。
5.本发明所提供的方案如下:
6.一种工件自动加工装置,包括送料装置和加工装置,所述送料装置与加工装置相配合,所述加工装置包括工装机构、加工机构和联动机构。本发明的基本原理是由送料装置将工件自动送至加工机构,由工装机构负责将送来的工件上料至加工位置并固定,由加工机构负责对工件的加工,通过联动机构对加工机构和工装机构的联动配合,当加工机构对一个工件加工完成后,工装机构将加工完成的工件自动下料,再将新的工件上料至“加工位”,进行下一循环的加工。
7.具体的,所述工装机构包括活动卡钳和上料机构,所述上料机构设于活动卡钳上方并与活动卡钳相配合,上料机构包括进料口与限位拨爪,所述进料口分别与送料装置和活动卡钳位置对应,限位拨爪设于进料口内。本发明所述的进料口与送料装置对应配合,由送料装置送抵的工件能够准确落入送料口内并由限位拨爪进行限位,限位拨爪用于控制进料口与活动卡钳之间的开关,当限位拨爪打卡时,工件能够落入活动卡钳内,进行夹紧、加工等操作。
8.进一步的,所述限位拨爪包括上限位拨爪和下限位拨爪,所述上限位拨爪和下限位拨爪联动配合,并且上限位拨爪和下限位拨爪不同时与所述进料口相配合。上限位拨爪和下限位拨爪之间的距离与工件的高度相当,使得上限位拨爪和下限位拨爪之间的空间作为工件上料的“预备位”。具体的,当上限位拨爪处于打开状态时,下限位拨爪关闭,使一个工件落入上述“预备位”;当下限位拨爪旋转打开,“预备位”的工件落入活动卡钳中的加工位,同时,上限位拨爪关闭,阻止多余的工件落下;在下限位拨爪复位至关闭时,上限位拨爪联动打开,新的工件落入“预备位”,等待下一次的循环操作。
9.其中,本发明所述的活动卡钳包括卡钳与油泵,所述卡钳可通过油泵的作用进行夹紧、松开的动作。
10.所述加工机构包括滑台和加工刀具,所述滑台可沿加工方向在最远端与最近端之间往复运动,加工刀具设于滑台上加工刀具与活动卡钳相配合,滑台与限位拨爪相配合。本发明所述的加工刀具为本领域加工扳手扳口齿牙的专用刀具齿牙推刀,位置与加工位的工件紧密贴合,在滑台由最近端运动至最远端的过程中,齿牙推刀从工件的一侧运动至另一侧,过程中完成对工件齿牙的加工。
11.本发明主要是用于扳手上的扳口部件的齿牙部分的加工,一般所使用的刀具为齿牙推刀,但并不作为本发明的限定。本发明的工件自动加工装置也可以通过更换刀具以适用于其他需要以切削方式加工的工件,例如加工刀具可以选用磨盘实现打磨加工,加工刀具可以选择刨刀进行刨削加工等。
12.滑台上还设有第一传感器,所述第一传感器与活动卡钳相配合。当滑台运动至最远端时,齿牙推刀完成对工件的加工,第一传感器接收到滑台的位置信号后,油泵启动一次,使卡钳松开。第一传感器一般选择位置传感器。
13.所述联动机构包括斜契、旋转压板和限位杆,所述斜契设于滑台上,限位杆设于活动卡钳内,所述联动板一端与斜契相配合,另一端与限位杆相配合。所述联动板包括旋转压板和压板转轴,旋转压板中部设有压板转轴,旋转压板两端可围绕压板转轴进行转动。旋转压板设置在卡钳与齿牙推刀不同的一侧,以卡钳和齿牙推刀相配合的一侧为正侧,另一侧为背侧,则本发明所述的旋转压板设置在卡钳的背侧。
14.所述斜契与限位杆均与旋转压板的同侧相配合。所述限位杆一端与所述旋转压板相配合,另一端从卡钳的背侧伸入卡钳内。
15.具体地说,在滑台由最远端运动至最近端的过程中,斜契逐渐推动旋转压板旋转,使旋转压板另一端连接的限位杆从卡钳的背侧逐渐伸入至卡钳的正侧,当滑台运动至最近端时,限位杆最为靠近卡钳的正侧,此位置为限位杆的工作位。在滑台向最远端运动的过程中,旋转压板反向旋转,限位杆回位至卡钳背侧位置。
16.所述限位杆上设有第二传感器,所述第二传感器与上述油泵相配合。第二传感器一般可以选择震动传感器,当工件由进料口落入卡钳中时,由限位杆将工件限位在“加工位”,工件与限位杆的接触震动产生信号,油泵接收信号后启动一次,卡钳夹紧,固定工件在“加工位”。
17.上述的“加工位”,是指工件的待加工部位能够伸出卡钳,配合齿牙推刀进行加工,限位杆的工作位能够将落下的工件准确限位在所述加工位,由卡钳夹紧固定。
18.所述滑台上设有弹性拨杆,当所述滑台的往复运动至最近端时,所述弹性拨杆与下限位拨爪相配合。如上所述,在普通状态时,上限位拨爪处于打开状态,下限位拨爪处于关闭状态;当所述滑台由最远端向最近端运动中,弹性拨杆拨动下限位拨爪向打开状态运动,上限位拨爪进行联动,在滑台运动到最近端时,下限位拨爪处于打开状态,上限位拨爪处于关闭状态,“预备位”中的工件落入卡钳中;当滑台向最远端运动时,弹性拨杆与下限位拨爪脱离配合,限位拨爪回位。
19.本发明所述的送料装置包括振动盘和工件通道,所述振动盘与工件通道配合连接,由振动盘振动使工件落入工件通道中进行输送。工件通道与所述进料口相配合,工件通道负责对工件的导向,使工件能够落入上述送料口中。
20.根据选用的加工刀具不同、工件形状大小不同、需要进行的加工不同,本发明的装
置可以对限位杆的长度、位置、上下限位拨爪的距离等进行调整设置,以适用于不同形状的工件、不同切削加工方式的加工。
21.本发明的工作原理是:
22.送料装置将待加工工件送至进料口处,此时上限位拨爪处于打开状态,下限位拨爪处于关闭状态,待加工工件落入“预备位”。
23.滑台由最远端向最近端运动的过程为上料过程,运动中,斜契推动旋转压板转动,带动限位杆由卡钳的背侧逐渐伸入至卡钳的正侧,同时弹性拨杆拨动下限位拨爪向打开状态转动。当滑台运动到最近端时,此时限位杆伸入至最靠近卡钳正侧的工作位,同时,弹性拨杆拨动下限位拨爪打开,待加工工件落入卡钳内,被限位杆限位在加工位,工件与限位杆的接触产生信号,通过第二传感器的信号控制油泵启动一次,卡钳夹紧,工件被卡钳固定在“加工位”。
24.滑台由最近端向最远端运动的过程为加工、下料过程,在运动中,位于滑台靠近卡钳一侧的齿牙推刀完成对加工位中的工件的推齿加工。同时,运动中,旋转压板反向旋转使限位杆回位,下限位拨爪有打开状态转为关闭状态,同时上限位拨爪转为打开状态,工件落入“预备位”中。当滑台运动至最远端时,第一传感器接受到滑台的位置信号,控制油泵启动一次,卡钳松开,由于限位杆已经回位,工件可由加工位落下,完成下料。
25.与现有技术相比,本发明优点是:
26.1、本发明实现全自动上料、推齿加工、下料,加工效率显著提高,减少了生产中的人力成本。
27.2、可通过更换加工刀具、调整限位杆的长度、位置、上下限位拨爪的距离等设置,适用于其他需要进行切削加工的工件加工。
附图说明
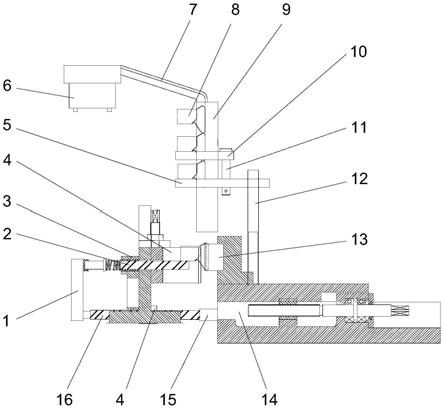
28.图1是本技术总装图。
29.图2是加工装置结构图。
30.图3是加工装置俯视结构图。
31.图4是下限位拨爪结构图。
32.图中,1、旋转压板,2、限位杆,3、导套支座,4、卡钳,5、下限位拨爪, 6、振动盘,7、工件通道,8、工件,9、进料口,10、上限位拨爪,11、转轴, 12、弹性拨杆,13、齿牙推刀,14、滑台,15、斜契,16、活动杆,17、压板转轴。
具体实施方式
33.下面是结合实施例对本发明进一步说明。
34.如图1-4所示,一种工件自动加工装置,包括送料装置和加工装置,送料装置和加工装置都安装在整体的安装基架上。
35.送料装置包括设置在装置上方的振动盘6,振动盘6的出件口连接斜置的工件通道7,工件8通过自身重力作用在工件通道7中滑落。工件通道7的另一端连接进料口9的上端,进料口9垂直设置,形状配合扳手扳口工件8形状,使工件8 能够垂直排列,依次落入。
36.进料口9为垂直设置的工件导向通道,下部设置下限位拨爪5,上部设置上限位拨
爪10,上限位拨爪10和下限位拨爪5通过同一根转轴11进行联动连接,转轴11固定连接在进料口9的外侧,并在转轴或限位拨爪上中安装回位弹簧,实现回位功能。上限位拨爪10和下限位拨爪5形状相同,能够配合扳手扳口工件8的形状,对工件进行限位,阻止工件在进料口中下落。两个限位拨爪之间的距离与工件8的高度相同,使一个工件能够刚好位于两个限位拨爪之间,将两个限位拨爪之间的空间定义为“预备位”,避免一次有多余的工件下落。
37.通过转轴11的作用,两个限位拨爪能够进行旋转,在打开状态和关闭状态进行切换,在默认状态下,即上述回位弹簧未发生形变的状态,下限位拨爪5处于关闭状态,同时上限位拨爪10处于开启状态;当下限位拨爪5被拨动,两个限位拨爪同步旋转,即下限位拨爪5旋转至打开状态,上限位拨爪10同步旋转至关闭状态;当下限位拨爪5不再受力后,在回位弹簧的作用下,两个限位拨爪回位至默认状态。
38.进料口9的下端对齐卡钳4的中缝位置,使工件8从进料口落下后,能够落入卡钳4中,再由卡钳4进行夹紧。卡钳4由油泵(图中未画出)作为动力来源,油泵输出一次,卡钳4便可在夹紧/松开状态进行切换。油泵可由支架设置在整个装置的一侧。
39.工件8落入到卡钳4之中进行夹紧的位置为工件的“加工位”,具体指的是,在固定在“加工位”后,工件的待加工面能够伸出卡钳4,以供齿牙推刀13进行加工。将卡钳“加工位”的一侧定义为卡钳的正侧,相对的另一侧为卡钳的背侧。卡钳4的背侧,距离卡钳一定距离处,安装旋转压板1。旋转压板1的中部有压板转轴17,压板转轴17垂直安装在安装基架上,使旋转压板1能够围绕压板转轴17在水平方向上旋转。
40.旋转压板1的一端,朝向卡钳4的一侧,通过底座安装限位杆2,限位杆2的另一端从背侧伸入卡钳4中,卡钳的背侧处安装导套支座3,对限位杆2进行支撑导向,并且在底座与导套支座3之间,限位杆外侧套设弹簧,帮助限位杆2回位。限位杆2上安装震动传感器,将震动传感器的信号与油泵连接。旋转压板1的另一端,同样是朝向卡钳背侧的一侧,连接安装一根活动杆16,通过旋转压板1的旋转,使活动杆16与限位杆2同步反方向运动。活动杆16通过导套支座3进行导向,伸至滑台的边缘。活动杆16可通过销轴与旋转压板连接。
41.滑台14安装在安装基架上,通过往复油泵或者柱塞泵或者电机实现滑台14 在水平位置往复运动,运动方向为沿卡钳正侧垂直方向进行往复运动,以滑台 14最靠近卡钳4的位置为往复运动的最近端,滑台最远离卡钳4的位置为往复运动的最远端。滑台14的水平位置略低于卡钳4,并且与活动杆16对齐,表面上靠近卡钳4的一侧安装齿牙推刀13,使齿牙推刀13水平位置能够对齐卡钳4内的“加工位”,同时能够配合“加工位”工件,对工件8的加工面进行推齿加工。齿牙推刀13的结构参考现有技术结构,以能够对工件进行推齿加工为准。当滑台14 位于最近端时,齿牙推刀13位于“加工位”的近端,在滑台14向最远端运动中,齿牙推刀13由工件8的近端运动至远端,过程中对工件进行推齿加工。在滑台14 运动的最远端的位置,安装位置传感器,并将位置传感器的信号与油泵连接。
42.滑台14上靠近卡钳的侧边上,安装斜契15,斜契15的斜面朝向卡钳4方向,斜契的安装位置和长度配合滑台14的运动进行设置:当滑台14运动由最远端运动到最近端的过程中,斜契15斜面与活动杆16接触,并逐渐推动活动杆16,活动杆16在导套支座3的导向下径向运动,推动旋转压板1旋转,带动限位杆2向卡钳4的正侧伸入;在滑台14运动至最近端时,斜契15与活动杆16的接触点为斜面的最高点,此时旋转压板1的旋转幅度最大,限位杆2一端最靠近卡钳4的正侧,此时的限位杆2位置为“工作位”。限位杆“工作位”的设置标准是:配
合工件 8的形状,使工件在被“工作位”的限位杆2限位后,正好位于工件的“加工位”,以此标准对限位杆的长度、活动杆的长度、限位杆与活动杆在旋转压板上的间距等数值。活动杆16外侧也套设弹簧,帮助回位。在滑台14向最远端运动的过程中,斜契15逐渐与活动杆16脱离接触,在限位杆2外侧的弹簧和活动杆16外侧的弹簧作用下,旋转压板1回位旋转,限位杆2和活动杆16均回到初始位置。
43.滑台的表面安装垂直向上延伸的弹性拨杆12,弹性拨杆12底端可直接焊接在滑台表面,安装在靠近卡钳4的一侧,具体位置为:弹性拨杆12位置与下限位拨爪5相对应,高度以能接触到下限位拨爪5为准,在滑台14由最远端运动到最近端的过程中,弹性拨杆12接触下限位拨爪5并逐渐拨动,滑台14运动至最近端时,弹性拨杆12将下限位拨爪5由关闭状态拨动至打开状态,上限位拨爪10联动至关闭状态;滑台14运动至最远端过程中,弹性拨杆12与下限位拨爪5脱离接触,下限位拨爪5在回位弹簧的作用下回位至关闭状态。
44.本发明的工作逻辑是:初始状态下,滑台14位于最远端,下限位拨爪5 处于关闭状态,上、下限位拨爪之间的“预备位”中有工件,卡钳4处于松开状态。设备工作,滑台14由最远端向最近端运动,运动中,斜契15与活动杆16接触并推动活动杆,活动杆16推动旋转压板1旋转,带动限位杆2向卡钳中4的“工作位”运动,同时,弹性拨杆12与下限位拨爪5接触并拨动下限位拨爪5向打开状态转动。当滑台运动到最近端时,限位杆2伸至“加工位”,同时,弹性拨杆 12将下限位拨爪5旋转至打开状态,“预备位”中的工件8落下至卡钳4中,并被“工作位”的限位杆阻挡,工件被限位在“工作位”,工件8与限位杆2接触时触发震动传感器,信号发送至油泵,油泵启动工作一次,卡钳4夹紧,将工件8 夹紧固定在“加工位”,完成上料。上料过程中,卡钳4空载,齿牙推刀13不工作;上限位拨爪10同步转动至关闭状态,阻止进料口9中的工件落入“预备位”。
45.滑台14由最近端向最远端运动中,齿牙推刀13接触“加工位”的工件8加工面并进行推齿加工,同时,斜契15与活动杆16逐渐脱离接触,旋转压板1在弹簧的作用下回位旋转,限位杆2在卡钳4内向背侧缩回至初始位置,同时,弹性拨杆12与下限位拨爪5逐渐脱离接触,下限位拨爪5在回位弹簧的作用下回位至关闭状态,上限位拨爪10同步回位至打开状态,工件8落入“预备位”。当滑台14 运动至最远端时,触发位置传感器,信号传输至油泵,油泵启动工作一次,卡钳4松开,工件8不再被限位杆2限位,落入卡钳4下方的下料袋中,完成下料,进入下一个工作循环。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1