一种导体自动加工生产线的制作方法
1.本发明涉及自动化生产线设备技术领域,具体而言,涉及一种导体自动加工生产线。
背景技术:
2.传统导体生产时,各工序普遍为人工操作生产,比如上料、切割、焊接、打标等都需要安排工人进行操作,这导致在产品生产时由于人工因素的干扰,会导致工件质量不同;加上每个工序的加工设备零散分布,使得工件转运次数多,在工件长度>3米时,现有的加工设备并无相应的机构或者措施来保证产品的质量,特别是在端头组对导体进行组对焊接、车焊缝时通常采用的是单头加工,使生产效率低且精度无法保证。
技术实现要素:
3.本发明公开了一种导体自动加工生产线,结构简单,操作便利,旨在改善导体进行组对焊接、车焊缝时通常采用是单头加工,使生产效率低且精度无法保证的问题。
4.本发明采用了如下方案:一种导体自动加工生产线,包括传送装置,在所述传送装置的传送方向上依次设置有上料装置、加工装置、下料装置,所述加工装置包括滑轨、搬运机器人、回转机构、焊接机器人以及车削机构;其中,所述滑轨上固定设置有适于放置导体的放置架;搬运机器人,所述搬运机器人设置有多功能爪手,所述搬运机器人被构造成实现导体在放置架和传送装置之间的转移,且实现端头从端头放料架到导体两端的运动;回转机构,所述回转机构可移动地设置于放置架的两侧,其包括变位机、适于固定端头的主动套筒转换块以及定位套筒,所述变位机被构造成能在所述滑轨上移动,且带动所述主动套筒转换块转动,所述定位套筒连接在所述主动套筒转换块上;焊接机器人,所述焊接机器人设置于所述变位机上方,其被构造成能焊接所述端头与导体的连接处;车削机构,所述车削机构设置在所述回转机构上,其被构造成能在所述焊接机器人焊接完毕后对焊接处车削加工。
5.进一步地,所述加工装置与所述上料装置之间设置有双头数控车床,所述双头数控车床上设置有并排设置的第一桁架机械手和第二桁架机械手,所述第一桁架机械手与第二桁架机械手之间的距离与所述双头数控车床到其两侧的传送装置的距离相同;所述双头数控车床用于对导体进行对中处理且对导体的两端进行机械加工。
6.进一步地,所述双头数控车床包括x轴调节组件、y轴调整轴和车床刀座,所述车床刀座安装于所述x轴调节组件上,且所述x轴调节组件适于在所述y轴调整轴上滑动。
7.进一步地,所述加工装置还包括烟尘处理器以及切屑回收装置,所述烟尘处理器适于对焊接产生的废气进行处理,所述切屑回收装置设置于所述放置架下方,用于对车削产生的废屑进行回收。
8.进一步地,所述多功能爪手包括呈t字形设置的第一爪手、第二爪手、第三爪手,所述第一爪手用于将导体从上游传送装置搬运到变位机上;所述第二爪手用于将导体从变位
机搬送到下游的传送装置上;所述第三爪手用于抓取端头至所述定位套筒内。
9.进一步地,所述上料装置与所述双头数控车床之间还设置有切割机和第一打标机,所述切割机适于对导体进行等距切割;所述第一打标机适于对切割后的导体进行打标。
10.进一步地,所述上料装置上设置有至少两个弧形的连杆拨,所述连杆拨的一端延伸至传送装置上,其另一端的尾部位于上料架上。
11.进一步地,所述下料装置与加工装置之间设置有打磨装置和第二打标机,所述打磨装置适于对加工后的导体进行打磨,所述第二打标机连接在所述打磨装置的下游侧,适于对工件进行二次打标。
12.进一步地,所述传送装置在所述第二打标机处形成u形回转。
13.进一步地,所述第二打标机与所述下料装置之间沿着传送装置的传送方向依次设置有烘干设备、包装设备以及下料机器人,所述下料机器人适于将导体堆垛在堆垛工位。
14.通过采用上述技术方案,本发明可以取得以下技术效果:本发明通过对生产线的优化设置,使导体加工实现全自动化的加工,适用较长长度的导体且整体生产线结构紧凑,有效减少了工件转运过程的损伤,可以实现连续生产,提高加工效率。
附图说明
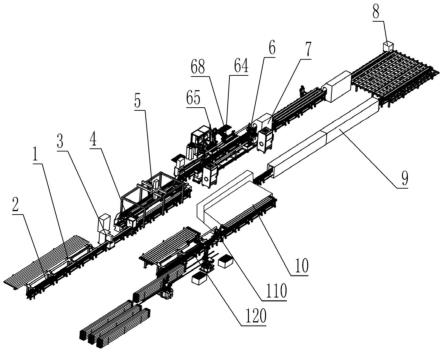
15.图1是本发明实施例一种导体自动加工生产线的整体结构示意图;
16.图2是本发明实施例一种导体自动加工生产线的上料装置的结构示意图;
17.图3是本发明实施例一种导体自动加工生产线的桁架机械手的整体结构示意图;
18.图4是本发明实施例一种导体自动加工生产线的双头数控车床的结构示意图;
19.图5是本发明实施例一种导体自动加工生产线的加工装置的结构示意图;
20.图6是本发明实施例一种导体自动加工生产线的工作流程结构示意图;
21.图标:上料装置1、上料架11、连杆拨12、尾部121、传送装置2、切割机3、第一打标机4、双头数控车床5、x轴调节组件51、y轴调整轴52、v型块53、车床刀座54、第一桁架机械手55、第二桁架机械手56、加工装置6、滑轨61、放置架62、搬运机器人63、多功能爪手64、爪臂641、第一爪手642、第二爪手643、第三爪手644、回转机构65、变位机651、定位套筒652、主动套筒转换块653、焊接机器人66、车削机构67、端头放料架68、打磨装置7、第二打标机8、清洗装置9、烘干装置10、包装装置110、下料装置120、导体130、端头140。
具体实施方式
22.实施例
23.结合图1至图6所示,本实施例提供了一种导体自动加工生产线,结构简单,操作便利,旨在改善导体130进行组对焊接、车焊缝时通常采用是单头加工,使生产效率低且精度无法保证的问题。
24.本发明具体采用了如下方案:一种导体自动加工生产线,包括传送装置2,所述传送装置2的运动方向上依次设置有上料装置1、加工装置6、下料装置120,所述加工装置6包括滑轨61、搬运机器人63、回转机构65、焊接机器人66以及车削机构67;其中,所述滑轨61上固定设置有适于放置导体的放置架;搬运机器人63,其设置有多功能爪手64,用于将导体放入放置架或者从所述放置架上取出,且其能够将端头140从端头放料架上抓取至所述回转
机构65上;回转机构65,所述回转机构65可移动地设置于放置架的两侧,包括变位机651、和适于对端头140进行固定的定位套筒652,所述变位机651适于在所述滑轨61上移动,且所述定位套筒652可转动地设置在所述变位机651上;焊接机器人66,所述焊接机器人66适于在所述端头140安装在所述导体上后对端头140与导体的连接处进行焊接加工;车削机构67,所述车削机构67设置在所述回转机构65上,其适于在所述焊接机器人66加工完毕后对焊接处进行车削加工。
25.参见图1所示,在本发明中,生产线沿着传送装置2依次设置有上料架11、切割机3、第一打标机4、双头数控车床5、加工装置6、打磨装置7、第二打标机8、清洗装置9、烘干装置10、包装装置110以及下料装置120。传送装置2为常用的滚筒传送,其为现有的技术这里不多加阐述。特别地,传送装置2在本发明中并非在一条直线上,其根据不同工位的错位相接,中间通过机械手进行物料的转移,并且在第二打标机8处通过横向平移的方式形成了u形的回转,使得导体130可以沿着与上料方向相反的方向移动,这样的设计缩短了生产线的长度,使整个生产线的占地面积减小,有效节省空间。
26.如图2所示,具体地,所述上料装置1包括上料架11,所述上料架11上设置有至少两个可转动的弧形的连杆拨12,所述连杆拨12的一端延伸至传送装置2上,其另一端的尾部121位于上料架11上,所述连杆拨12配置为当尾部121感应到导体130时将翘起使导体130顺着连杆拨12滑动到传送装置2上。在其中一种实施例中,尾部121可以设置成弧形的,半露于所述上料架11的放置平面,且连杆拨12的中间部位铰接在上料架11上,当导体130滚动至连杆拨12撞击在尾部121时,导体130使尾部121下降使之低于上料架11平面或者与上料架11平面平行,当导体130进入连杆拨12后,在导体130将在连杆拨12的弧形面上滑动,并滚落到传送装置2上。通过该装置设置,使得导体130在移动到传送装置2时更加平缓,且无需使用机械手进行传动,结构简单实用。当然在其他实施例中,也在连杆拨12上设置电机驱动,通过电机控制连杆拨12的转动使导体完成转移,该实施例中的方式使得上料控制更加精准。当然,这里连杆拨12的数量可以设置为2、3、4个或者更多个。
27.所述切割机3设置在上料装置1的下游侧,用于将较长的工件切割成长度相等且符合需求的导体130,这里所述切割机3采用圆盘锯,垂直度好、效率高,使用时,风冷锯片、锯片微量油,不会污染工件。使用该切割机3解决了传统工艺采用锯床时,锯切精度较差、需要冷却液,容易流入到铝管内部难清理的问题。切割机3采用三面定位的方式,对导体130进行固定后切割,切割完成后,由传送装置2继续送至打标工位有第一打标机4进行打标,根据一件一码要求,产品二维码中涵盖产品加工过程信息,产品订单号,产品长度等信息,这里需要统一打标位置。打标机采用现有设备,其能对导体130进行打标,使导体130用于独立的标识码,方便后续的追溯。
28.结合图3和图4所示,第一打标机4的下游侧设置有双头数控车床5,双头数控车床5两侧均设置有传送装置2,其中一侧连接第一打标机4,另一侧连接下移工位,在双头数控车床5的上方设置有第一桁架机械手55和第二桁架机械手56,桁架机械手通过桁架设置在双头数控车床5与传送装置2的上方,每个桁架机械手上均设置有两个夹爪,用于夹取导体130,这里夹爪采用气缸驱动的方式。所述第一桁架机械手55与第二桁架机械手56并排平行设置,在优选实施例中,可以将为所述第一桁架机械手55与第二桁架机械手56之间的距离设置为与双头数控车床5到两侧的传送装置2的距离相同,这样当所述第一桁架机械手55将
导体130从传送装置2移动到双头数控车床5的工作位上时,所述第二桁架机械手56能将另一导体130从双头数控车床5的工作位抓取至下游的传送装置2上;通过该设置可以提高传送的效率。这里双头数控车床5适于对导体130进行对中处理且对导体130的两端进行机械加工,在其两端均设置有x轴调节组件51和y轴调整轴52,用于控制车床刀座54的移动,且在x轴调节组件51和y轴调整轴52上设置了v型块53用于承接和固定导体130,在v型块53上还设置了传感器;当传感器感应到导体130放置在v型块53上时,车床两头的x轴调整轴通过导轨开始双向移动,对导体130进行对中处理,调整到合适位置停下。车床刀座54通过电机可以沿着x轴或者y轴移动,对导体130进行车坡口、车端面、镗内孔等机械加工,车完以后,自动吹扫内孔。在导体130下方还设置了废料滑板,用于回收废屑。这里通过可调节的车床刀座54使得该双头数控车床5可以适应不同长度的导体130。
29.结合图5所示,本实施例中,所述加工装置6包括了滑轨61、搬运机器人63、回转机构65、焊接机器人66以及车削机构67,这里搬运机器人63设置在传送装置2的侧边,其设置有多功能爪手64,多功能爪手64包括了呈t字形设置的第一爪手642、第二爪手643、第三爪手644,所述第一爪手642用于将导体130从上游传送装置2搬运到变位机651上;所述第二爪手643用于将导体130从变位机651搬送到下游的传送装置2上;所述第三爪手644用于抓取端头140至所述定位套筒652内。这里第一爪手642、第二爪手643、第三爪手644分别固定在一长方形爪臂641的两端,适于在搬运机器人63的控制下进行抓取工作。这里的端头140放置在端头放料架68上,端头140用于固定在导体130的两端。
30.所述回转机构65包括变位机651、和适于对端头140进行固定的定位套筒652,所述变位机651适于在所述滑轨61上移动,且所述定位套筒652可转动地设置在所述变位机651上。这里回转机构65设置在滑轨61的两端,滑轨61中间设置有用于承接和固定导体130的放置架62,回转机构65能够朝着放置架62的方向移动。在所述回转机构65上还设置有变位机651和定位套筒652,所述定位套筒652通过主动套筒转换块653连接在所述变位机651的转动体上,主动套筒转换块653设有卡爪,卡爪用于将端头140固定,端头140的一半套在定位套筒652里头,端头140与所述导体130适配。焊接机器人66设置在回转机构65上,其能跟随变位机651一起在滑轨61上移动,用于对导体130和端头140的连接处进行焊接。所述回转机构65上还设置有车削机构67,用于对导体130和端头140进行加工,所述车削机构67可以在回转机构65上左右滑动。这里加工装置6的工作原理为:首先是搬运机器人63利用第一爪手642将导体130从送料架放置于变位机651上的v型架上,再利用第三爪手644,将端头140从端头140端头放料架送至回转机构65的定位套筒652上进行固定。搬运机器人63离开,去拿另外一个端头140,放置于另外一边的定位套筒652上,安放完成之后,两头的回转机构65同时往带有放置架62的方向移动,当端头140触碰到导体130端部后停止,焊接机器人66先对将导体130与端头140进行点焊,再控制变位机651旋转,使焊接机器人66对工件进行满焊,焊接完成后,车削机构67再对焊缝进行车削,车削完成后由搬运机器人63自动下料。同时,烟尘处理器对焊接过程中的烟尘进行处理,铝削回收装置将车削的废屑进行自动回收。通过该方案,使得端头140固定焊接在导体130的过程实现了全自动化,无需人工操作,焊接的质量高,能大大提高产品的合格率和焊接加工效率。
31.在加工装置6装置的下游侧设置有打磨装置7和第二打标机8,所述打磨装置7适于对加工后的导体130进行打磨,所述第二打标机8连接在所述打磨装置的下游侧,适于对工
件进行二次打标。这里打磨装置7为现有的设备,这里不再多加阐述,这里设置第二打标机8是由于打磨后,第一打标机4打出标识码被打磨掉。因此需要重新打标,重新打完标后进行横移输送,且间隔输送,防止加工完的导体130相碰。
32.所述第二打标机8与所述下料装置120之间沿着传送装置2的传送方向依次设置有烘干设备、包装设备以及下料机器人,所述下料机器人适于将导体130堆垛在堆垛工位。这里所述下料机器人可以直接使用于加工装置6中相同的搬运机器人63。所述烘干装置10、包装装置110均使用现有技术产品,这里不再多加阐述。值得注意的是,下料装置120的下料架也设置有与上料架11相同的连杆拨12。通过该设置,使得整个导体130加工的生产线完成了从上料到最后产品输出的一个完整链条,在整个生产线中基本实现了全部自动化。
33.在本发明中,每个工位工序上均设置有扫码设备,用于检测扫描打码机所做的标识码,并对加工信息进行存储。例如在加工装置6前方、打磨装置7前方、包装装置110后端均设置有扫码器,在进入工序加工时先扫码记录。通过打标机和扫码设备的设置,可以使生产流程更加可控化和具有可追溯性。
34.应当理解的是,在本发明中至少设置有一个控制器用于与各个部分的电机电连接,用于控制电机的运行,同时能控制气缸的工作。
35.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1