一种麻花针合件校直机的制作方法
1.本发明涉及一种麻花针合件校直机,属于连接器加工设备技术领域。
背景技术:
2.连接器的麻花针与针体的压接过程中,由于受力的影响,少部分产品在压接后会产生不同程度的弯曲。麻花针合件产品细小,其校直工艺是连接器生产中非常重要的环节,它决定了连接器的公头和母头是否能够顺利对插的关键。
3.在实际生产中,麻花针合件产品的校直工艺全都由人工上料装夹,凭手感校直,靠人的视觉观感进行检测判断是否合格,从而导致校直合格率偏低,另外没有标准的检测方法,仅靠人的视觉观感进行检测,校直后的产品参差不齐。
4.在这一背景下,研发专用校直及检测设备以解决上述问题,提高校直合格率,检测方法标准化,进而完成设备的研发。
技术实现要素:
5.本发明的目的在于提供一种自动化程度高、提高校直合格率以及检测标准化的麻花针合件校直机,以克服现有技术的不足。
6.本发明的技术方案:一种麻花针合件校直机,包括机箱,在机箱的中央安装有旋转夹持机构,在旋转夹持机构的周围依次安装有振动盘、分料机构、上下料机构、收料盒、视觉机构以及校直机构。
7.进一步,所述分料机构包括分别固定在机箱上的支撑座a和支撑座b,在支撑座a的顶部固定连接有接料块,在接料块的顶部开设有与振动盘出料口对接的接料槽,在接料块的两侧对称地滑动连接有导杆,在两根导杆的上端固定连接有活动顶板,在活动顶板的底部固定连接有与接料槽接触的弹性压料杆,两根导杆的下端穿过支撑座a的顶部后与活动底板固定连接,在支撑座a上还固定安装有压料电机,所述压料电机的输出轴与活动底板传动连接,在支撑座a的顶部一侧固定安装有挡料气缸,在挡料气缸的滑动座上固定连接有挡料板,且挡料板与接料槽的出料方向垂直;在支撑座b上固定连接有取料气缸,在取料气缸的滑动座上固定连接有旋转夹持气缸,在旋转夹持气缸的旋转头上固定连接有取料气动夹爪,且取料气动夹爪靠近接料槽的出料口。
8.进一步,所述上下料机构包括固定在机箱上的支撑座c,在支撑座c的顶部固定连接有水平导轨,同时在支撑座c的顶部还转动连接有与水平导轨平行的丝杠,在水平导轨上滑动连接有滑动块,在滑动块的两端分别固定连接有上料气缸和下料气缸,在上料气缸和下料气缸的滑动座上分别固定连接有上料气动夹爪和下料气动夹爪,在丝杠的端部固定安装有上下料电机,所述上下料电机的输出轴与丝杠的端部传动连接,在丝杠上螺纹连接有丝杠螺母,所述丝杠螺母与滑动块固定连接。
9.进一步,所述视觉机构由对称安装在旋转夹持机构两侧的视觉相机和光源灯组成。
10.进一步,所述校直机构包括固定在机箱上的调节支架以及固定安装在调节支架上的校直支架,在校直支架的端部固定连接有校直电机,在校直支架的顶部固定安装有直线导轨,在校直支架的底部转动连接有传动轴,所述传动轴的一端与校直电机的输出轴传动连接,在直线导轨上滑动连接有直线滑块,所述直线滑块与传动轴的另一端传动连接,在直线滑块上固定连接有校直杆,在校直杆的端部固定连接有校直片,在校直片的端部开设有v型校直槽。
11.更进一步,所述调节支架包括固定在机箱上的调节底板,在调节底板两端分别固定连接短u型架和长u型架,所述短u型架通过铰轴与校直支架的一端铰链连接,在长u型架上开设有弧形孔,在弧形孔内穿入有调节螺栓,所述校直支架的另一端与调节螺栓连接。
12.进一步,所述旋转夹持机构包括转动连接在机箱上旋轴主轴,在旋轴主轴的下方固定安装有旋转电机,所述旋转电机的输出轴与旋轴主轴的下端传动连接,在旋轴主轴的上端固定连接有气动三爪夹头。
13.由于采用上述技术方案,本发明的优点在于:
14.1、本发明只需人工往振动盘内添加麻花针合件,校直过程全部由设备自动完成,自动化程度高,大大提高了加工效率,降低了生产成本,保证了产品的一致性;
15.2、本发明配置了视觉机构检测功能来替代人的视觉观感检测,实现了检测方式标准化,提高了检测合格率。
附图说明
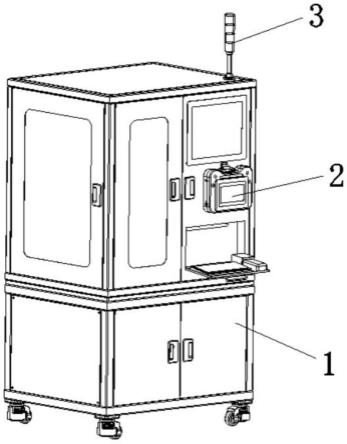
16.图1是本发明的整体结构示意图;
17.图2是本发明打开机箱后的结构示意图;
18.图3是分料机构的前侧立体图;
19.图4是图3的处放大图;
20.图5是分料机构的后侧立体图;
21.图6是上下料机构的立体图;
22.图7是上下料机构的侧视图;
23.图8是图7的b-b截面图;
24.图9是旋转夹持机构的立体图;
25.图10是旋转夹持机构的主视图;
26.图11是校直机构的立体图;
27.图12是图11的c处放大图;
28.图13是麻花针合件串联在一起时的结构示意图;
29.图14是不合格产品图像;
30.图15是合格产品图像。
具体实施方式
31.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和实施例对本发明作进一步的详细说明。
32.本发明的实施例:参见图1及图2,包括机箱1,在机箱1的中央安装有旋转夹持机构
8,在旋转夹持机构8的周围依次安装有振动盘4、分料机构5、上下料机构6、收料盒8、视觉机构10以及校直机构9。
33.参见图3~5,所述分料机构5包括分别固定在机箱1上的支撑座a501和支撑座b504,在支撑座a501的顶部固定连接有接料块510,在接料块510的顶部开设有与振动盘4出料口对接的接料槽513,在接料块510的两侧对称地滑动连接有导杆512,在两根导杆512的上端固定连接有活动顶板509,在活动顶板509的底部固定连接有与接料槽513接触的弹性压料杆508,两根导杆512的下端穿过支撑座a501的顶部后与活动底板511固定连接,在支撑座a501上还固定安装有压料电机502,所述压料电机502的输出轴与活动底板511传动连接,在支撑座a501的顶部一侧固定安装有挡料气缸503,在挡料气缸503的滑动座上固定连接有挡料板507,且挡料板507与接料槽513的出料方向垂直;在支撑座b504上固定连接有取料气缸505,在取料气缸505的滑动座上固定连接有旋转夹持气缸506,在旋转夹持气缸506的旋转头上固定连接有取料气动夹爪514,且取料气动夹爪514靠近接料槽513的出料口。
34.分料机构动作原理:
35.参见图13,由于麻花针合件11的结构特性,麻花针合件11在振动盘4轨道里的状态是串联在一起的,因此需要分料机构5对麻花针合件11进行分离。麻花针合件11从振动盘4经过轨道流出,并进入接料块510的顶部的接料槽513,此时压料电机502动作,带动弹性压料杆508下压,挡料气缸503动作,挡料板507后退,取料气缸505前移,取料气动夹爪514抓取麻花针合件11后取料气缸505后退,旋转夹持气缸506带动取料气动夹爪514旋转90度,使麻花针合件11处于竖直方向,从而完成分料工作。
36.参见图6~8,所述上下料机构6包括固定在机箱1上的支撑座c601,在支撑座c601的顶部固定连接有水平导轨608,同时在支撑座c601的顶部还转动连接有与水平导轨608平行的丝杠603,在水平导轨608上滑动连接有滑动块605,在滑动块605的两端分别固定连接有上料气缸607和下料气缸604,在上料气缸607和下料气缸604的滑动座上分别固定连接有上料气动夹爪610和下料气动夹爪602,在丝杠603的端部固定安装有上下料电机609,所述上下料电机609的输出轴与丝杠603的端部传动连接,在丝杠603上螺纹连接有丝杠螺母611,所述丝杠螺母611与滑动块605固定连接。
37.上下料机构的动作原理:分料机构5抓取麻花针合件11处于竖直方向,上下料电机609动作,使上料气缸607移动至麻花针合件11上方,上料气缸607动作,使上料气动夹爪610靠近麻花针合件11后抓取麻花针合件11,并送至旋转夹持机构8的气动三爪夹头803上进行夹持,待视觉机构10检测、校直机构9校正等相关动作完成后,上下料电机609再次动作,使下料气缸604移动至气动三爪夹头803上方,上下料电机609动作,使上下料电机609上的下料气动夹爪602夹取校直完成后麻花针合件11,并放到接料盒7里,同时,上料气动夹爪610抓取下一个麻花针合件11送至旋转夹持机构8的气动三爪夹头803上进行夹持,如此循环,以完成所有产品的上下料工作。
38.参见图9及图10,所述视觉机构10由对称安装在旋转夹持机构8两侧的视觉相机1001和光源灯1002组成。所述旋转夹持机构8包括转动连接在机箱1上旋轴主轴802,在旋轴主轴802的下方固定安装有旋转电机801,所述旋转电机801的输出轴与旋轴主轴802的下端传动连接,在旋轴主轴802的上端固定连接有气动三爪夹头803。参见图11及图12,所述校直机构9包括固定在机箱1上的调节支架以及固定安装在调节支架上的校直支架907,在校直
支架907的端部固定连接有校直电机908,在校直支架907的顶部固定安装有直线导轨909,在校直支架907的底部转动连接有传动轴914,所述传动轴914的一端与校直电机908的输出轴传动连接,在直线导轨909上滑动连接有直线滑块910,所述直线滑块910与传动轴914的另一端传动连接,在直线滑块910上固定连接有校直杆911,在校直杆911的端部固定连接有校直片912,在校直片912的端部开设有v型校直槽913。所述调节支架包括固定在机箱1上的调节底板901,在调节底板901两端分别固定连接短u型架902和长u型架903,所述短u型架902通过铰轴904与校直支架907的一端铰链连接,在长u型架903上开设有弧形孔906,在弧形孔906内穿入有调节螺栓906,所述校直支架907的另一端与调节螺栓906连接。为了提高校直效果,麻花针合件11与校直机构9上的校直片912之间形成30~60度的夹角,其角度可以通过调节支架进行调节,这样能够保证在校直过程中麻花针合件11产生相应的形变后回弹,以达到校直的目的。
39.视觉机构、旋转夹持机构以及校直机构的动作原理:
40.当旋转夹持机构8上的气动三爪夹头803夹持住麻花针合件11,旋转电机801动作,带动麻花针合件11缓慢转动,视觉机构10上的视觉相机1001对麻花针合件11进行拍照,并将图像上传至上位机2,在上位机2分析麻花针合件11是否合格;参见图14及图15,麻花针合件11旋转一圈,视觉相机1001按一圈的五等分对麻花针合件11的五个方向进行拍照,检测次数可根据需要进行更改。
41.当检测结果为合格,则下料气动夹爪602直接抓取麻花针合件11放至合格接料盒7里,当检测结果为不合格,则旋转夹持机构8带动麻花针合件11高速旋转,同时校直机构9对麻花针合件11进行校直,校直完成后视觉机构再对麻花针合件11时行检测,如果检测合格,则下料气动夹爪602抓走麻花针合件11放到合格接料盒里,如果检测不合格,则校直机构9再对麻花针合件11进行校直,两次校直后还是不合格,将不再校直,下料气动夹爪602直接抓走麻花针合件11放至不合格接料盒7里。
42.校直机构9的具体校直过程如下:当产检测产品不合格时,旋转夹持机构8带动麻花针合件11高速旋转,校直电机908动作,使校直片912向前移动接近产品,此位置设为原点,再以原点为基准前进1~2mm的校正距离,使校直片912上的v型校直槽913包住麻花针合件11顶部进行校直,保证在校直过程中麻花针合件11不偏移。根据校直效果设定校正距离,校直动作快速循环运行3次,完成产品的校直工作。
43.为了实现自动化控制,上述麻花针合件校直机还包括上位机2、plc系统和报警器3,通过上位机2和plc系统控制各个机构上的电机以及气缸动作,并通过报警器3提示动作错误。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1