一种基于ROV的深海打捞钻孔装置及其使用方法与流程
本发明涉及深海打捞的钻孔装置,具体涉及一种基于rov的深海打捞钻孔装置及其使用方法。
背景技术:
1、关于深海打捞作业技术最早源于深海对沉底鱼雷和水雷的打捞,20世纪60年代,美国水下研究中心(nuc)研制了打捞机械手装备水下缆控机器人curv,并成功在457m水深完成沉底鱼雷的打捞和在884m水深处氢弹的回收以及完成失事潜水器和火箭残骸的打捞任务,2013年奥赛德公司利用rov配合吊篮在爱尔兰西南海域4700m深处将118吨银锭从二战时期英国沉没的商船上打捞上来,过去50年来,人类成功完成了对失事沉底的飞机黑匣子、导弹、航天发动机、潜艇潜器、古沉船等高价值目标的搜寻定位与打捞,深海打捞技术也逐渐发展成熟并投入市场化运行,其中rov以其强大的运载能力和实时、高效的作业能力成为水下打捞作业必备工具。
2、目前国内深海打捞业务日渐增多,主要以深海科研设备的打捞为主,“海马”号4500米级无人遥控潜水器自2014年入列以来完成20余套科研设备的回收和打捞,为国家挽回了重大经济损失,更重要的是回收了宝贵的科研数据资料,在深海打捞中需要多种类型的打捞作业工具,如液压钳、打捞钩等,但深海打捞作业有时需要进行钻孔作业以完成打捞的挂钩或回收,而深海打捞钻孔国内极少研制,结合已有深海打捞作业经验以及利用rov强大的扩展能力,对更加实用、系统简单的深海打捞钻孔装置的研制成为亟待解决的问题。
技术实现思路
1、针对现有技术中的不足,本发明提供一种基于rov的深海打捞钻孔装置及其使用方法,其可以随遥控无人潜水器下潜完成在深海中进行钻孔作业。
2、为实现上述目的,本发明可以采用以下技术方案进行:
3、第一方面,本发明提供一种基于rov的深海打捞钻孔装置,其包括:
4、夹紧器,其设有用于夹持深海待打捞物体的夹紧腔;以及,
5、连接在所述夹紧器上的进尺压力单元,和连接在所述进尺压力单元上的钻孔单元,其中,所述钻孔单元具有切削钻,所述切削钻用于对所述深海待打捞物体进行削切和打孔,所述进尺压力单元用于提供所述钻孔单元进行削切和打孔的压力。
6、如上所述的基于rov的深海打捞钻孔装置,进一步地,所述夹紧器包括顶板和底板,所述顶板和所述底板上下相对设置且两者之间的空间形成所述夹紧腔,所述顶板上安装有液压油缸,所述液压油缸的活塞杆连接所述底板。
7、如上所述的基于rov的深海打捞钻孔装置,进一步地,所述进尺压力单元包括导轨滑块、进尺导轨和导轨马达,所述顶板通过向上延伸的导轨固定板固定连接所述导轨马达,所述导轨马达的输出端连接所述进尺导轨,所述导轨滑块传动连接在所述进尺导轨上。
8、如上所述的基于rov的深海打捞钻孔装置,进一步地,钻孔单元包括钻进马达、马达支座和所述切削钻,所述钻进马达通过所述马达支座安装在所述导轨滑块上,所述钻进马达的输出端通过杆件连接有所述切削钻。
9、如上所述的基于rov的深海打捞钻孔装置,进一步地,所述切削钻为麻花钻。
10、如上所述的基于rov的深海打捞钻孔装置,进一步地,所述顶板与所述底板相对的一侧面均设有防滑垫。
11、如上所述的基于rov的深海打捞钻孔装置,进一步地,所述顶板设有贯穿的顶板孔洞,所述底板上设有与所述顶板孔洞对应的贯穿的底板孔洞,所述顶板孔洞和所述底板孔洞的内孔尺寸均与所述切削钻的钻头的外形尺寸相适配。
12、如上所述的基于rov的深海打捞钻孔装置,进一步地,所述顶板的侧面还设有把手。
13、如上所述的基于rov的深海打捞钻孔装置,进一步地,还包括安装在所述顶板上垫板,所述导轨固定板通过垫板固定连接在所述顶板上。
14、第二方面,本发明还提供一种基于rov的深海打捞钻孔装置的使用方法,其利用上述的基于rov的深海打捞钻孔装置进行,其包括以下步骤:
15、对钻孔装置进行甲板检查:外观检测、液压管路、液压泵密封检查及配装钻头;
16、对钻孔装置进行功能试验:启动rov泵站,控制钻进马达驱动麻花钻旋转,控制导轨马达驱动导轨滑块上下往复运动,控制液压油缸驱动夹紧器的顶板靠近或远离底板;
17、使用rov携带钻孔装置到达指定作业点,使用机械手抓取钻孔装置,调节夹紧器上液压油缸使夹紧器夹紧所需钻孔的目标物;
18、控制导轨马达驱动导轨滑块向下运动,使麻花钻的钻头接触目标物,启动钻进马达,驱动麻花钻快速斜切目标,控制导轨马达维持进尺导轨具有向下运动的趋势和压力;
19、观察钻孔进度,配合使用导轨马达和钻进马达防止钻头卡钻并维持设定的钻进速度;
20、待钻头打穿目标物后停止钻进马达,控制钻进马达提升麻花钻,然后控制液压油缸放松使钻孔装置与被钻物体脱离,最后使用机械手抓取钻孔装置至回收篮,同rov一同回收至水面。
21、本发明与现有技术相比,其有益效果在于:本发明集成钻孔单元、进尺压力单元及夹紧器为一体的紧凑型深海钻孔装置,可以满足rov深海打捞飞机残骸、失事潜水器、大型块状等物体挂钩和穿孔的需求,另外通过液压油补偿电机和马达,可以保障其具有6000米级水深的作业能力;同时本装置具有体积小、水下可功能可靠性高,耐腐蚀性能强,工作灵活稳定,并可快速、有效地随rov下潜完成对海底物体钻孔的要求,对于完成打捞任务具有重要意义。
技术特征:
1.一种基于rov的深海打捞钻孔装置,其特征在于,包括:
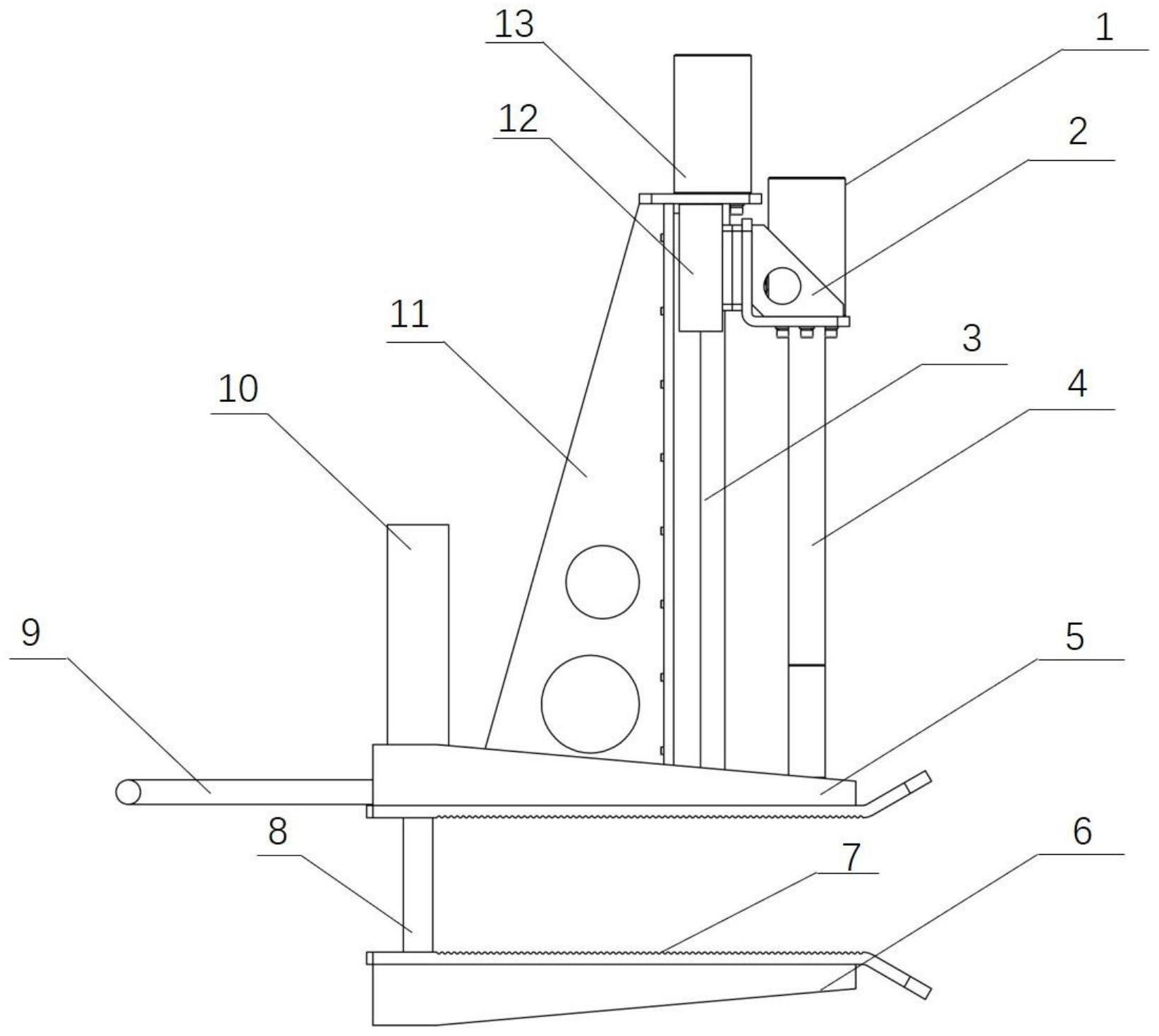
2.根据权利要求1所述的基于rov的深海打捞钻孔装置,其特征在于,所述夹紧器包括顶板(5)和底板(6),所述顶板(5)和所述底板(6)上下相对设置且两者之间的空间形成所述夹紧腔,所述顶板(5)上安装有液压油缸(10),所述液压油缸(10)的活塞杆(8)连接所述底板(6)。
3.根据权利要求2所述的基于rov的深海打捞钻孔装置,其特征在于,所述进尺压力单元包括导轨滑块(12)、进尺导轨(3)和导轨马达(13),所述顶板(5)通过向上延伸的导轨固定板(11)固定连接所述导轨马达(13),所述导轨马达(13)的输出端连接所述进尺导轨(3),所述导轨滑块(12)传动连接在所述进尺导轨(3)上。
4.根据权利要求3所述的基于rov的深海打捞钻孔装置,其特征在于,钻孔单元包括钻进马达(1)、马达支座(2)和所述切削钻,所述钻进马达(1)通过所述马达支座(2)安装在所述导轨滑块(12)上,所述钻进马达(1)的输出端通过杆件连接有所述切削钻。
5.根据权利要求1所述的基于rov的深海打捞钻孔装置,其特征在于,所述切削钻为麻花钻(4)。
6.根据权利要求2所述的基于rov的深海打捞钻孔装置,其特征在于,所述顶板(5)与所述底板(6)相对的一侧面均设有防滑垫(7)。
7.根据权利要求4所述的基于rov的深海打捞钻孔装置,其特征在于,所述顶板(5)设有贯穿的顶板孔洞(14),所述底板(6)上设有与所述顶板孔洞(14)对应的贯穿的底板孔洞(15),所述顶板孔洞(14)和所述底板孔洞(15)的内孔尺寸均与所述切削钻的钻头的外形尺寸相适配。
8.根据权利要求2所述的基于rov的深海打捞钻孔装置,其特征在于,所述顶板(5)的侧面还设有把手(9)。
9.根据权利要求3所述的基于rov的深海打捞钻孔装置,其特征在于,还包括安装在所述顶板(5)上垫板(16),所述导轨固定板(11)通过垫板(16)固定连接在所述顶板(5)上。
10.一种基于rov的深海打捞钻孔装置的使用方法,其利用如权利要求1-9任一所述的基于rov的深海打捞钻孔装置进行,其特征在于,包括:
技术总结
本发明公开了一种基于ROV的深海打捞钻孔装置及其使用方法,涉及深海打捞的钻孔装置技术领域,本发明的钻孔装置包括:夹紧器、连接在所述夹紧器上的进尺压力单元和连接在所述进尺压力单元上的钻孔单元,夹紧器设有用于夹持深海待打捞物体的夹紧腔;其中,所述钻孔单元具有切削钻,所述切削钻用于对所述深海待打捞物体进行削切和打孔,所述进尺压力单元用于提供所述钻孔单元进行削切和打孔的压力。本发明集成钻孔单元、进尺压力单元及夹紧器为一体的紧凑型深海钻孔装置,具有体积小、水下可功能可靠性高,耐腐蚀性能强,工作灵活稳定,并可快速、有效地随ROV下潜完成对海底物体钻孔的要求,对于完成打捞任务具有重要意义。
技术研发人员:张亚念,黄煜宗,黄元铿,叶俊聪,梁永志,曾湲溶,陈春亮,陶军,陈宗恒,陈家旺
受保护的技术使用者:南方海洋科学与工程广东省实验室(广州)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!