一种用于精密零件加工的数控焊接机械手臂体的制作方法
本发明涉及数控焊接,具体是一种用于精密零件加工的数控焊接机械手臂体。
背景技术:
1、以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,称之为焊接;利用一个专用的可存储程序的计算机执行一些或全部的基本数字控制功能的nc系统,称之为数控;为了满足在精密零件加工时的要求,利用焊接技术和数控技术结合可以很好做到;
2、现有技术中用于数控焊接加工精密零件的机械手臂,由于其多是通过在关节处设置气缸,通过气缸驱动带动弯曲、弯折等动作,但由于气缸伸缩长度的精度难以控制,进而造成在加工精密零件时容易误差变大的问题。
技术实现思路
1、针对机械手臂多是通过在关节处设置气缸,通过气缸驱动带动弯曲、弯折等动作,但由于气缸伸缩长度的精度难以控制,进而造成在加工精密零件时容易误差变大的问题。为实现上述目的,本发明提供如下技术方案:
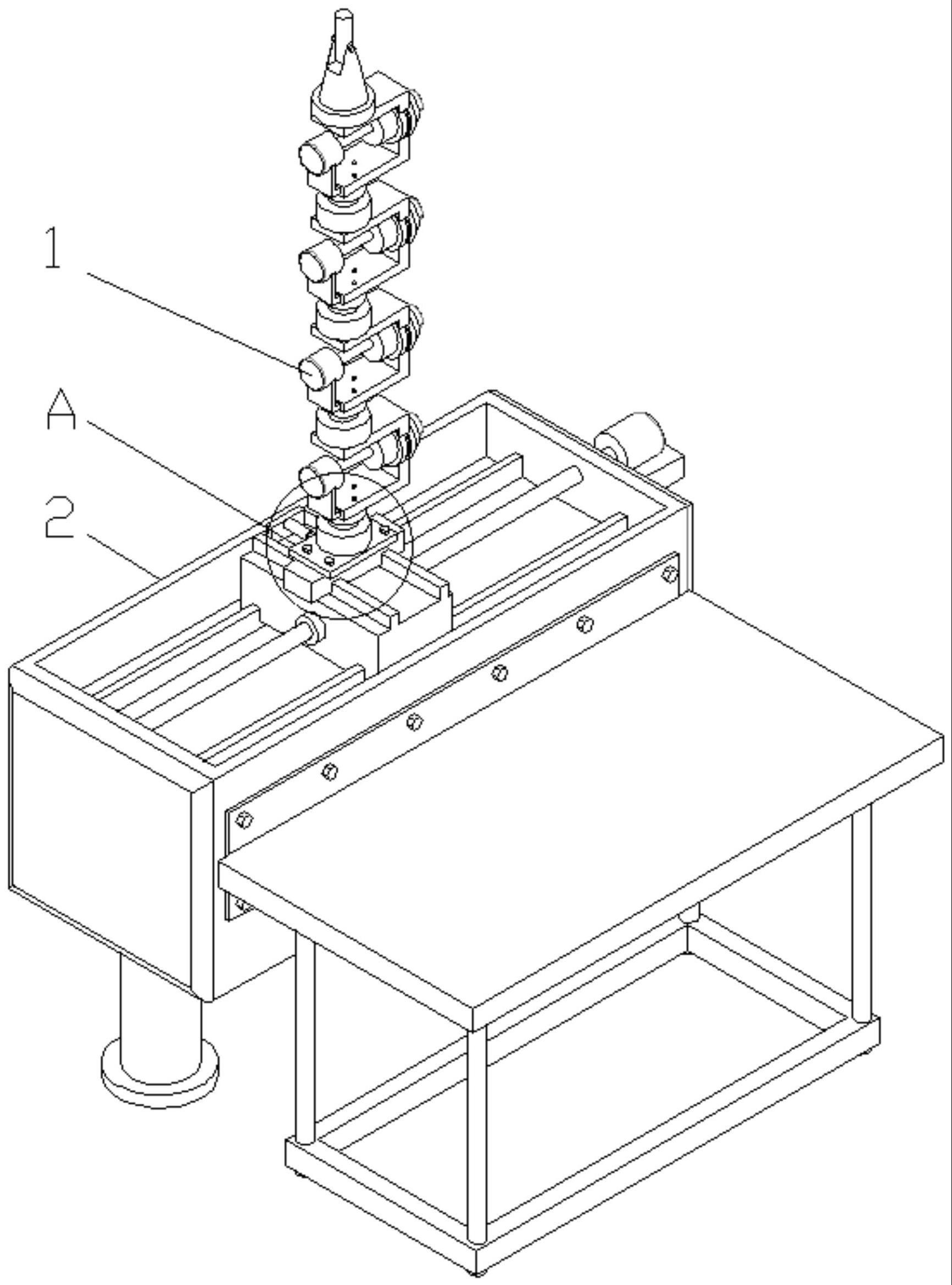
2、一种用于精密零件加工的数控焊接机械手臂体,包括安装在数控控制底座上的焊接机械手臂体,所述焊接机械手臂体是由手臂主体和焊接头组成,手臂主体是由多个相互可拆卸式安装的机械手臂单元关节组成;其中,机械手臂单元关节包含有纵向调节结构和横向调节结构,纵向调节结构用于纵向调节焊接头的位置,横向调节结构用于横向调节焊接头的位置;纵向调节结构内部包含有移动变速调节结构,利用移动变速调节结构调节纵向调节结构的调节精度,完成以不同精度去纵向调节焊接头位置;移动变速调节结构上包含有多个不同齿距的从动齿轮和多个不同齿距的主动齿轮,通过调节多个不同齿距的从动齿轮和多个不同齿距的主动齿轮之间的匹配组合,完成调节纵向调节结构的调节精度。
3、进而,在利用数控控制底座和焊接机械手臂体组合,使用焊接头进行对精密零件进行焊接;在对零件不同位置进行精密加工过程中,通过多个机械手臂单元关节进行细化短距离调节弧度,实现任意位置的高覆盖性调节焊接头;同时在利用机械手臂单元关节调节的过程中,使用调节多个不同齿距的从动齿轮和多个不同齿距的主动齿轮之间的匹配组合,完成调节纵向调节结构的调节精度,实现以不同精度去纵向调节焊接头位置,避免了造成在加工精密零件时容易误差变大的问题。
4、进一步的,所述横向调节结构上设有横向驱动电机,横向驱动电机的输出轴上固定有驱动轴ⅱ,驱动轴ⅱ固定在驱动盘上,驱动盘通过多个螺栓ⅲ可拆卸式安装在纵向调节结构,做到多个机械手臂单元关节呈相互可拆卸式安装。
5、再进一步的,所述纵向调节结构上设有定位板ⅱ,定位板ⅱ与驱动盘通过多个螺栓ⅲ可拆卸式安装,做到多个机械手臂单元关节呈相互可拆卸式安装;纵向调节结构上设有固定在定位板ⅱ一端的端头处的齿轮套筒,齿轮套筒通过外部套设固定有的外套环固定在定位板ⅱ上;外套环上转动连接有定位板ⅰ,支撑立板、定位板ⅰ和定位板ⅱ均呈l型;移动变速调节结构装配在齿轮套筒内部,并动力传动连接在纵向驱动电机上,纵向驱动电机通过支撑立板固定在远离齿轮套筒一端的定位板ⅱ的端头处;移动变速调节结构通过外套环上开设有的滑动槽固定连接在定位板ⅰ。
6、优化的,所述移动变速调节结构上设有转轴,而多个不同齿距的从动齿轮等间距固定在转轴上;移动变速调节结构上还设有驱动轴ⅰ,驱动轴ⅰ为伸缩型,且通过气缸调节;气缸通过安装板ⅱ和穿插在安装板ⅱ上的螺栓ⅱ配合固定在齿轮套筒端部;而多个不同齿距的主动齿轮等间距套设固定在驱动轴ⅰ上;驱动轴ⅰ固定连接在纵向驱动电机上。
7、多个不同齿距的所述从动齿轮包含有从动齿轮ⅰ、从动齿轮ⅱ和从动齿轮ⅲ,从动齿轮ⅰ、从动齿轮ⅱ和从动齿轮ⅲ均固定在转轴上,从动齿轮ⅲ啮合在齿条圈上,齿条圈固定在外固定环内部,外固定环转动连接在滑动槽内部,外固定环外壁上固定有连接块,并通过连接块固定在定位板ⅰ上。多个不同齿距的所述主动齿轮包含有主动齿轮ⅰ、主动齿轮ⅱ和主动齿轮ⅲ,驱动轴ⅰ上设有外套轴,主动齿轮ⅰ、主动齿轮ⅱ和主动齿轮ⅲ均套设固定在外套轴上;外套轴内部沿外套轴的柱向方向上活动穿插有内穿插轴,内穿插轴四周壁上固定有多个沿着内穿插轴柱向方向分布的多个限位凸沿,多个限位凸沿呈环形阵列分布,而外套轴的内壁上配合多个限位凸沿开设有多个穿插槽。
8、进一步的,所述焊接机械手臂体通过设置有的安装板ⅰ和穿插在安装板ⅰ上的多个螺栓ⅰ组合安装在数控控制底座上;数控控制底座上是由数控控制底座主体,以及安装在数控控制底座主体上的操作台组成;数控控制底座主体和操作台之间通过安装板ⅲ和多个螺栓ⅳ组成固定;安装板ⅲ固定在操作台上设有的台面板上,多个螺栓ⅳ穿插在安装板ⅲ上并进入到数控控制底座主体上开设有的多个螺纹安装孔内部进行固定数控控制底座主体和操作台;所述台面板底部固定有多个阵列分布的立杆,多个立杆均穿插固定在加固框上。
9、再进一步的,所述数控控制底座主体上设有数控控制箱,数控控制箱底部安装有多个支撑腿,数控控制箱的顶部开设有安装槽,安装槽内部安装有横向调节滑轨,横向调节滑轨上安装有纵向调节滑轨;而焊接机械手臂体通过安装板ⅰ和多个螺栓ⅰ组合安装在纵向调节滑轨上;横向调节滑轨用于在整体上调节焊接机械手臂体的横向位置;纵向调节滑轨用于在整体上调节焊接机械手臂体的纵向位置。
10、将精密零件放置在操作台上,通过横向调节滑轨和纵向调节滑轨大范围调节焊接机械手臂体后,通过多个机械手臂单元关节进行细化短距离调节弧度,实现组合后任意位置的高覆盖性调节焊接头,利用焊接头进行对精密零件进行焊接。
11、优化的,所述横向调节滑轨上设有横向移动块,横向移动块滑动限位在安装槽内部固定有的多个横向滑轨上;横向移动块上贯穿固定有螺纹管,螺纹管内部螺纹穿插有丝杆,丝杆转动连接在安装槽上,并固定在电机的输出轴上;电机通过固定拖板固定在数控控制箱的外侧壁上。
12、优化的,所述纵向调节滑轨上设有纵向移动块,纵向移动块滑动限位在横向移动块上设有的多个纵向滑轨上,纵向移动块上配合多个螺栓ⅰ开设有多个螺纹固定孔,多个螺纹固定孔与多个螺栓ⅰ呈一一对应状;纵向移动块上固定有液压伸缩杆,液压伸缩杆在远离纵向移动块的一端固定在支撑拖板上,支撑拖板固定在横向移动块上。
13、与现有技术相比,本发明用于精密零件加工的数控焊接机械手臂体,在利用数控控制底座和焊接机械手臂体组合,使用焊接头进行对精密零件进行焊接;在对零件不同位置进行精密加工过程中,通过多个机械手臂单元关节进行细化短距离调节弧度,实现任意位置的高覆盖性调节焊接头;同时在利用机械手臂单元关节调节的过程中,使用调节多个不同齿距的从动齿轮和多个不同齿距的主动齿轮之间的匹配组合,完成调节纵向调节结构的调节精度,实现以不同精度去纵向调节焊接头位置,避免了造成在加工精密零件时容易误差变大的问题。
技术特征:
1.一种用于精密零件加工的数控焊接机械手臂体,包括安装在数控控制底座(2)上的焊接机械手臂体(1),其特征在于,所述焊接机械手臂体(1)是由手臂主体和焊接头(15)组成,手臂主体是由多个相互可拆卸式安装的机械手臂单元关节(11)组成;
2.根据权利要求1所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,所述横向调节结构上设有横向驱动电机(121),横向驱动电机(121)的输出轴上固定有驱动轴ⅱ(122),驱动轴ⅱ(122)固定在驱动盘(123)上,驱动盘(123)通过多个螺栓ⅲ(124)可拆卸式安装在纵向调节结构,做到多个机械手臂单元关节(11)呈相互可拆卸式安装。
3.根据权利要求2所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,
4.根据权利要求3所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,
5.根据权利要求4所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,多个不同齿距的所述从动齿轮包含有从动齿轮ⅰ(1262)、从动齿轮ⅱ(1266)和从动齿轮ⅲ(1270),从动齿轮ⅰ(1262)、从动齿轮ⅱ(1266)和从动齿轮ⅲ(1270)均固定在转轴(1261)上,从动齿轮ⅲ(1270)啮合在齿条圈(1263)上,齿条圈(1263)固定在外固定环(1264)内部,外固定环(1264)转动连接在滑动槽(120)内部,外固定环(1264)外壁上固定有连接块(1265),并通过连接块(1265)固定在定位板ⅰ(113)上。
6.根据权利要求4所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,
7.根据权利要求1所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,
8.根据权利要求7所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,
9.根据权利要求8所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,所述横向调节滑轨(213)上设有横向移动块(2135),横向移动块(2135)滑动限位在安装槽(211)内部固定有的多个横向滑轨(2133)上;横向移动块(2135)上贯穿固定有螺纹管(2136),螺纹管(2136)内部螺纹穿插有丝杆(2134),丝杆(2134)转动连接在安装槽(211)上,并固定在电机(2131)的输出轴上;电机(2131)通过固定拖板(2132)固定在数控控制箱(215)的外侧壁上。
10.根据权利要求8所述的一种用于精密零件加工的数控焊接机械手臂体,其特征在于,
技术总结
本发明属于数控焊接技术领域,具体是一种用于精密零件加工的数控焊接机械手臂体,包括焊接机械手臂体,所述焊接机械手臂体设有手臂主体和焊接头,手臂主体是由多个机械手臂单元关节组成;机械手臂单元关节包含有纵向调节结构和横向调节结构,纵向调节结构用于纵向调节焊接头的位置,横向调节结构用于横向调节焊接头的位置;纵向调节结构内部包含有移动变速调节结构,利用移动变速调节结构调节纵向调节结构的调节精度,完成以不同精度去纵向调节焊接头位置;移动变速调节结构上包含有多个不同齿距的从动齿轮和多个不同齿距的主动齿轮,通过调节多个不同齿距的从动齿轮和多个不同齿距的主动齿轮之间的匹配组合,完成调节纵向调节结构的调节精度。
技术研发人员:范颖,周睿
受保护的技术使用者:四川知汇通科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!