一种数控旋转锉磨床用换刀装置的制作方法
1.本发明涉及数控磨床技术领域,更具体地说,它涉及一种数控旋转锉磨床用换刀装置。
背景技术:
2.旋转锉的用途广泛,在机械、航空、汽车、船舶、化工和工艺雕刻等领域均有大量应用。当旋转锉表面的磨损达到一定程度时,需要对旋转锉进行更换。
3.目前数控磨床上旋转锉的更换都是人为完成的,并且每隔一段时间,需要人为对旋转锉的表面磨损进行查看,浪费人力成本。在更换旋转锉时,需要停止工件的加工,会导致工件的整体加工效率降低,并且也无法直观的了解不同旋转锉的耐磨性能差异。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种数控旋转锉磨床用换刀装置。
5.为实现上述目的,本发明提供了如下技术方案:
6.一种数控旋转锉磨床用换刀装置,包括换刀盒,所述换刀盒内转动安装有旋转架,所述旋转架上固定安装有固定块,所述固定块上固定安装有多个移动组件,所述移动组件一侧设置有气动手指,所述移动组件用于驱动气动手指移动,所述气动手指用于夹持旋转锉,在换刀盒内设置旋转架,在旋转架上设置多个移动组件和气动手指,可以提前在换刀盒内存放多个旋转锉,在需要换刀时,可以及时的更换旋转锉,旋转锉的更换过程无需操作人员参与,自动化程度高;
7.所述换刀盒上转动安装有翻转架,所述翻转架设置于旋转架上方,所述翻转架顶部、底部均固定安装有旋转组件,所述旋转组件一侧设置有定刀架,所述旋转组件用于驱动定刀架旋转,所述定刀架上固定安装有多个定位组件,所述定位组件一侧设置有定位块,所述定位组件用于驱动定位块移动,在需要换刀前,提前将旋转锉安装在下方的定刀架上,在需要换刀时,通过翻转架的旋转即可自动完成旋转锉的更换,提高旋转锉的更换效率;
8.所述换刀盒顶部固定安装有第一立杆、第二立杆,所述第一立杆上固定安装有换刀检测头,所述第二立杆上固定安装有磨损检测头,所述换刀检测头包括光投模块、拍照模块、判断分析模块,所述光投模块用于控制多个不同颜色的光源依次对旋转锉进行照射,光源包括但不限于红光、黄光、绿光、蓝光、紫光,所述拍照模块用于对每个光源照射下的旋转锉拍照,获取得到多张反射照片,所述判断分析模块用于判断旋转锉是否异常,具体为:获取得到每个光源照射旋转锉时的反射光强度,将所有的反射光强度进行求和处理并取均值,获取得到反射强度均值并标记为lm,获取得到每张反射照片的平均灰度值,将所有照片的平均灰度值进行求和处理并取均值,获取得到灰度总均值并标记为hj,利用公式获取得到旋转锉的磨损分析值te,其中,a1、a2均为预设比例系数,设
置磨损分析值阈值为fb,当旋转锉的磨损分析值te≥磨损分析值阈值fb时,则将该旋转锉标记为异常旋转锉,设置换刀检测头,换刀装置可以快速判断出旋转锉的磨损情况,及时对异常旋转锉进行标记以及更换;
9.所述磨损检测头包括磨损分级模块,所述磨损分级模块用于对旋转锉的耐磨性能进行分级,具体为:将旋转锉每次打磨后测得的磨损分析值te标记为实际磨析值jg,获取得到旋转锉前30次实际磨析值jg,设置每个实际磨析值jg均对应一个预估磨析值,当实际磨析值小于预估磨析值时,将该实际磨析值标记为良性磨析值,获取得到良性磨差总值gj;当实际磨析值大于预估磨析值时,将该实际磨析值标记为恶性磨析值,获取得到恶性磨差总值ud;
10.获取得到前30次实际磨析值jg中出现良性磨析值的次数,并标记为et,获取得到前30次实际磨析值jg中出现恶性磨析值的次数,并标记为rv;
11.利用公式获取得到该旋转锉的良性评级值nx;其中,b1、b2均为预设比例系数;利用公式获取得到该旋转锉的恶性评级值wb;其中,c1、c2均为预设比例系数;
12.利用公式获取得到该旋转锉的评级值ms,其中,d1、d2均为预设比例系数,当评级值ms≥评级值阈值时,将该旋转锉标记为特标旋转锉,当特标旋转锉的良性评级值nx>恶性评级值wb时,将该旋转锉标记为一级耐磨旋转锉,当特标旋转锉的良性评级值nx<恶性评级值wb时,将该旋转锉标记为三级耐磨旋转锉,当评级值ms<评级值阈值时,将该旋转锉标记为二级耐磨旋转锉,设置磨损检测头,换刀装置可以在工作时对旋转锉分级,操作人员可以根据旋转锉的分级情况直观的了解不同旋转锉的耐磨性能差异。
13.进一步的,所述换刀盒一侧开设有换刀口,所述换刀口设置于旋转架一侧。
14.进一步的,所述换刀盒外壁固定安装有调整组件,所述旋转架设置于调整组件一侧,所述调整组件用于驱动旋转架旋转。
15.进一步的,多个移动组件等弧度固定安装于固定块上,多个定位组件等弧度固定安装于定刀架上。
16.进一步的,所述换刀盒外壁固定安装有翻转组件,所述翻转架设置于翻转组件一侧,所述翻转组件用于驱动翻转架旋转。
17.进一步的,良性磨差总值gj通过下述步骤获取得到:将预估磨析值与良性磨析值进行差值计算,获取得到良性磨差值,并标记为ph,设置良性磨差值系数为rs,利用公式获取得到良性磨差总值gj,i=1、2、
…
n,n为出现良性磨析值的次数。
18.进一步的,恶性磨差总值ud通过下述步骤获取得到:将恶性磨析值与预估磨析值进行差值计算,获取得到恶性磨差值,并标记为ke;设置恶性磨差值系数为bd,利用公式
获取得到恶性磨差总值ud,i=1、2、
…
n,n为出现恶性磨析值的次数。
19.与现有技术相比,本发明具备以下有益效果:
20.1、在换刀盒内设置旋转架,在旋转架上设置多个移动组件和气动手指,可以提前在换刀盒内存放多个旋转锉,在需要换刀时,可以及时的更换旋转锉,旋转锉的更换过程无需操作人员参与,自动化程度高,在换刀盒上设置翻转架,并在翻转架上设置两个定刀架,在需要换刀前,提前将旋转锉安装在下方的定刀架上,在需要换刀时,通过翻转架的旋转即可自动完成旋转锉的更换,提高旋转锉的更换效率,换刀装置可以快速判断出旋转锉的磨损情况,及时对异常旋转锉进行标记以及更换;
21.2、设置磨损检测头,换刀装置可以对旋转锉分级,操作人员可以根据旋转锉的分级情况直观的了解不同旋转锉的耐磨性能差异。
附图说明
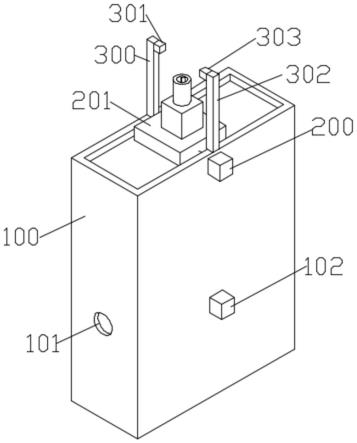
22.图1为一种数控旋转锉磨床用换刀装置的结构示意图;
23.图2为本发明换刀盒的内部结构图;
24.图3为本发明旋转架的结构示意图;
25.图4为本发明旋转架的内部结构图;
26.图5为本发明定刀架的内部结构图;
27.图6为本发明判断分析模块的原理框图;
28.图7为本发明磨损分级模块的原理框图。
29.100、换刀盒;101、换刀口;102、调整组件;103、旋转架;104、固定块;105、移动组件;106、气动手指;200、翻转组件;201、翻转架;202、旋转组件;203、定刀架;204、定位组件;205、定位块;300、第一立杆;301、换刀检测头;302、第二立杆;303、磨损检测头。
具体实施方式
30.实施例1
31.参照图1至图6,一种数控旋转锉磨床用换刀装置,包括换刀盒100,换刀盒100内转动安装有旋转架103,旋转架103上固定安装有固定块104,固定块104上固定安装有多个移动组件105,移动组件105一侧设置有气动手指106,移动组件105用于驱动气动手指106移动,气动手指106用于夹持旋转锉。换刀盒100一侧开设有换刀口101,换刀口101设置于旋转架103一侧。换刀盒100外壁固定安装有调整组件102,旋转架103设置于调整组件102一侧,调整组件102可以是电机、回转气缸,调整组件102用于驱动旋转架103旋转。多个移动组件105等弧度固定安装于固定块104上,移动组件105可以是气缸、油缸。在换刀盒100内设置旋转架103,在旋转架103上设置多个移动组件105和气动手指106,可以提前在换刀盒100内存放多个旋转锉,在需要换刀时,可以及时的更换旋转锉,旋转锉的更换过程无需操作人员参与,自动化程度高。
32.换刀盒100上转动安装有翻转架201,翻转架201设置于旋转架103上方,翻转架201顶部、底部均固定安装有旋转组件202,旋转组件202可以是电机,旋转组件202一侧设置有定刀架203,旋转组件202用于驱动定刀架203旋转,定刀架203上固定安装有多个定位组件
204,定位组件204可以是气缸、油缸,定位组件204一侧设置有定位块205,定位组件204用于驱动定位块205移动。多个定位组件204等弧度固定安装于定刀架203上。换刀盒100外壁固定安装有翻转组件200,翻转架201设置于翻转组件200一侧,翻转组件200可以是电机、回转气缸,翻转组件200用于驱动翻转架201旋转。在换刀盒100上设置翻转架201,并在翻转架201上设置两个定刀架203,在需要换刀前,提前将旋转锉安装在下方的定刀架203上,在需要换刀时,翻转架201旋转180
°
即可自动完成旋转锉的更换,提高旋转锉的更换效率。
33.换刀盒100顶部固定安装有第一立杆300,第一立杆300上固定安装有换刀检测头301,换刀检测头301包括光投模块、拍照模块、判断分析模块,光投模块用于控制多个不同颜色的光源依次对旋转锉进行照射,光源包括但不限于红光、黄光、绿光、蓝光、紫光,拍照模块用于对每个光源照射下的旋转锉拍照,获取得到多张反射照片,照片包括但不限于红光反射照片、黄光反射照片、绿光反射照片、蓝光反射照片、紫光反射照片,判断分析模块用于判断旋转锉是否异常,具体为:获取得到每个光源照射旋转锉时的反射光强度,将所有的反射光强度进行求和处理并取均值,获取得到反射强度均值并标记为lm,获取得到每张反射照片的平均灰度值,将所有照片的平均灰度值进行求和处理并取均值,获取得到灰度总均值并标记为hj,利用公式获取得到旋转锉的磨损分析值te,其中,a1、a2均为预设比例系数,a1取值为0.8,a2取值为1,设置磨损分析值阈值为fb,当旋转锉的磨损分析值te≥磨损分析值阈值fb时,则将该旋转锉标记为异常旋转锉。磨损分析值阈值fb为10,当旋转锉a的磨损分析值te为12时,将旋转锉a标记为异常旋转锉,当旋转锉b的磨损分析值te为8时,不对旋转锉b进行标记。设置换刀检测头301,换刀装置可以快速判断出旋转锉的磨损情况,及时对异常旋转锉进行标记以及更换。
34.实施例2
35.参照图7,在实施例1的基础上,换刀盒100顶部固定安装有第二立杆302,第二立杆302上固定安装有磨损检测头303,磨损检测头303包括磨损分级模块,磨损分级模块用于对旋转锉的耐磨性能进行分级,具体为:将旋转锉每次打磨后测得的磨损分析值te标记为实际磨析值jg,获取得到旋转锉前30次实际磨析值jg,设置每个实际磨析值jg均对应一个预估磨析值,当实际磨析值小于预估磨析值时,将该实际磨析值标记为良性磨析值,将预估磨析值与良性磨析值进行差值计算,获取得到良性磨差值,并标记为ph,设置良性磨差值系数为rs,s=1,2,3,
…
s;r1《r2《r3《
…
《rs,设定每个良性磨差值系数对应一个良性磨差值的范围,包括(0,p1],(p1,p2],
…
,(ph-1,ph],当ph∈(0,p1],则对应的良性磨差值系数取值为r1;利用公式获取得到良性磨差总值gj,i=1、2、
…
n,n为出现良性磨析值的次数;当实际磨析值大于预估磨析值时,将该实际磨析值标记为恶性磨析值,将恶性磨析值与预估磨析值进行差值计算,获取得到恶性磨差值,并标记为ke;设置恶性磨差值系数为bd,d=1,2,3,
…
d;b1《b2《b3《
…
《br,设定每个恶性磨差值系数对应一个恶性磨差值的范围,包括(0,k1],(k1,k2],
…
,(ke-1,ke],当ke∈(0,k1],则对应的恶性磨差值系数取值为b1;利用公式获取得到恶性磨差总值ud,i=1、2、
…
n,n为出现恶性磨析值的次数。获取得到前30次实际磨析值jg中出现良性磨析值的次数,并标记为et,获取得到前
30次实际磨析值jg中出现恶性磨析值的次数,并标记为rv。旋转锉a前30次实际磨析值jg中出现良性磨析值的次数为8次,出现恶性磨析值的次数为4次。旋转锉b前30次实际磨析值jg中出现良性磨析值的次数为6次,出现恶性磨析值的次数为5次。利用公式获取得到该旋转锉的良性评级值nx;其中,b1、b2均为预设比例系数,b1取值为0.3,b2取值为0.5;利用公式获取得到该旋转锉的恶性评级值wb;其中,c1、c2均为预设比例系数,c1的取值为0.1,c2的取值为0.2。旋转锉a的良性评级值nx为30,恶性评级值wb为12。旋转锉b的良性评级值nx为18,恶性评级值wb为10。
36.利用公式获取得到该旋转锉的评级值ms,其中,d1、d2均为预设比例系数,d1的取值为0.8,d2的取值为0.5,当评级值ms≥评级值阈值时,将该旋转锉标记为特标旋转锉,当特标旋转锉的良性评级值nx>恶性评级值wb时,将该旋转锉标记为一级耐磨旋转锉,当特标旋转锉的良性评级值nx<恶性评级值wb时,将该旋转锉标记为三级耐磨旋转锉,当评级值ms<评级值阈值时,将该旋转锉标记为二级耐磨旋转锉。评级值阈值为14,当旋转锉a的评级值ms为16时,将旋转锉a标记为特标旋转锉,当特标旋转锉a的良性评级值nx取值为30时,恶性评级值wb取值为12时,将特标旋转锉a标记为一级耐磨旋转锉,当旋转锉b的评级值ms为10时,将旋转锉b标记为二级耐磨旋转锉,当旋转锉c的评级值ms为18时,将旋转锉c标记为特标旋转锉,当特标旋转锉c的良性评级值nx取值为15时,恶性评级值wb取值为20时,将特标旋转锉c标记为三级耐磨旋转锉。设置磨损检测头303,换刀装置可以对旋转锉分级,操作人员可以根据旋转锉的分级情况直观的了解不同旋转锉的耐磨性能差异。
37.工作原理:
38.步骤一:将旋转锉插入最上方的定刀架203内,定刀架203内的定位块205对旋转锉的刀柄进行固定;
39.步骤二:将其余旋转锉从换刀口101放入换刀盒100内,调整组件102驱动旋转架103旋转,旋转架103带动对应的气动手指106移动至旋转锉一侧,气动手指106将旋转锉的刀头夹持住,进而将旋转锉存放在换刀盒100内;
40.步骤三:当换刀检测头301检测出旋转锉为异常旋转锉时,旋转架103带动对应的旋转锉旋转至定刀架203下方,而后移动组件105驱动气动手指106上升,旋转锉的刀柄插入定刀架203内,而后定位组件204驱动定位块205移动,定位块205对旋转锉的刀柄进行夹持,而后翻转组件200驱动翻转架201旋转180
°
,完成换刀。
41.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本模板的保护范围。
42.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此,不能
理解为对本发明的限制。此外,“第一”、“第二”仅由于描述目的,且不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
43.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
44.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1