一种基于双机器人协同的卫星生产线自动装配系统的制作方法
本发明涉及机器人自动装配,尤其涉及一种基于双机器人协同的卫星生产线自动装配系统。
背景技术:
1、工业机器人具有承载高、运动速度快、位姿控制精度高等特点,在工业生产中得到了广泛应用,如汽车生产线上的轮胎、挡风玻璃、座椅安装以及电视机显示、手机屏幕装配等。然而,针对卫星装配等离散性制造行业,存在着装配工位不固定、工况多样式且复杂、操作任务单一等特点,通过设置机器人并配备适应性的末端执行器,辅以视觉定位系统,可以实现对卫星等航天器生产线的自动化装配。目前,虽然已经将机器人应用于航天器装配领域,但形式多为单机器人人工操作装配,且只能够完成单一工序任务,工作效率与传统人工操作相比并没有显著提高。
2、近年来,随着卫星批量化生产需求的提出,人工装配效率难以满足批产要求,亟需一套自动化生产设备来完成卫星批产任务。基于卫星上表面仪器设备装配工况,根据卫星互联网系统整星生产线ai t流程,需要在线上开展单板装配、检测作业,主要包括i型星-z板、融合星±y板以及堆叠星的仪器设备安装、电缆铺设以及状态检查等工作。鉴于整星生产线批产任务的不确定性,在总装测试区设定了三个单板装配工位,其中前两个以人机协作为主,承担批产卫星定型前的试验星研制任务,第三个工位用于卫星定型后的批量化生产。考虑到未来庞大产能需求,同时兼顾整星生产线作为中国空间技术研究院对外技术展示窗口的功能定位,开展基于双机器人协同的自动装配系统方案设计研发,提出针对卫星互联网批产系统的机器人自动装配系统,并在第三个工位完成配置。
技术实现思路
1、本发明的目的在于:为了解决上述问题,而提出的一种基于双机器人协同的卫星生产线自动装配系统。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种基于双机器人协同的卫星生产线自动装配系统,包括卫星舱板,还包括控制软件系统、螺钉上料台、打钉末端执行器、螺钉涂胶末端执行器、电连接器插拔末端执行器、机器人b、导热硅脂涂覆末端执行器、设备抓取末端执行器、零部件上料台、机器人a、视觉装置;
4、所述控制软件系统用于对机器人b、机器人a运动轨迹、动作逻辑以及视觉识别结果进行处理与控制,与机器人b、机器人a、打钉末端执行器、螺钉涂胶末端执行器、电连接器插拔末端执行器、导热硅脂涂覆末端执行器、设备抓取末端执行器系统硬件通过tcp/i p协议进行数据交互;
5、所述螺钉上料台用于紧固件的存储,为了便于螺钉捡取,采用特制螺钉;
6、所述打钉末端执行器与机器人b末端连接,用于从螺钉上料台上吸取紧固件,并随机器人b移动至安装处,以预定力矩进行自动拧紧;
7、所述螺钉涂胶末端执行器与机器人b末端连接,用于机器人b对卫星舱板设备紧固件涂胶;
8、所述电连接器插拔末端执行器与机器人b末端连接,用于机器人b对卫星舱板设备电连接器的插拔;
9、所述导热硅脂涂覆末端执行器与机器人a末端连接,用于机器人a对卫星舱板导热硅脂的涂覆;
10、所述设备抓取末端执行器与机器人a末端连接,用于从零部件上料台上抓取设备,并随机器人a移动至星上安装处放置;
11、所述零部件上料台用于放置待装配设备,通过定制治具将零部件固定在特定位置,以便于机器人b、机器人a自动抓取。
12、优选地,还包括工具快换装置,所述工具快换装置分为公头和母头两部分,所述公头分别与打钉末端执行器、螺钉涂胶末端执行器、电连接器插拔末端执行器、导热硅脂涂覆末端执行器、设备抓取末端执行器以及机器人b其中之一连接,所述母头分别与机器人b、机器人a其中之一连接。
13、优选地,所述视觉装置包括两个工业相机,两个工业相机分别安装在机器人b、机器人a的末端,通过提取产品的几何特征,识别零部件摆放位置和星上安装位置。
14、一种基于双向机器人协同的卫星生产线自动装配的方法,包括以下步骤:
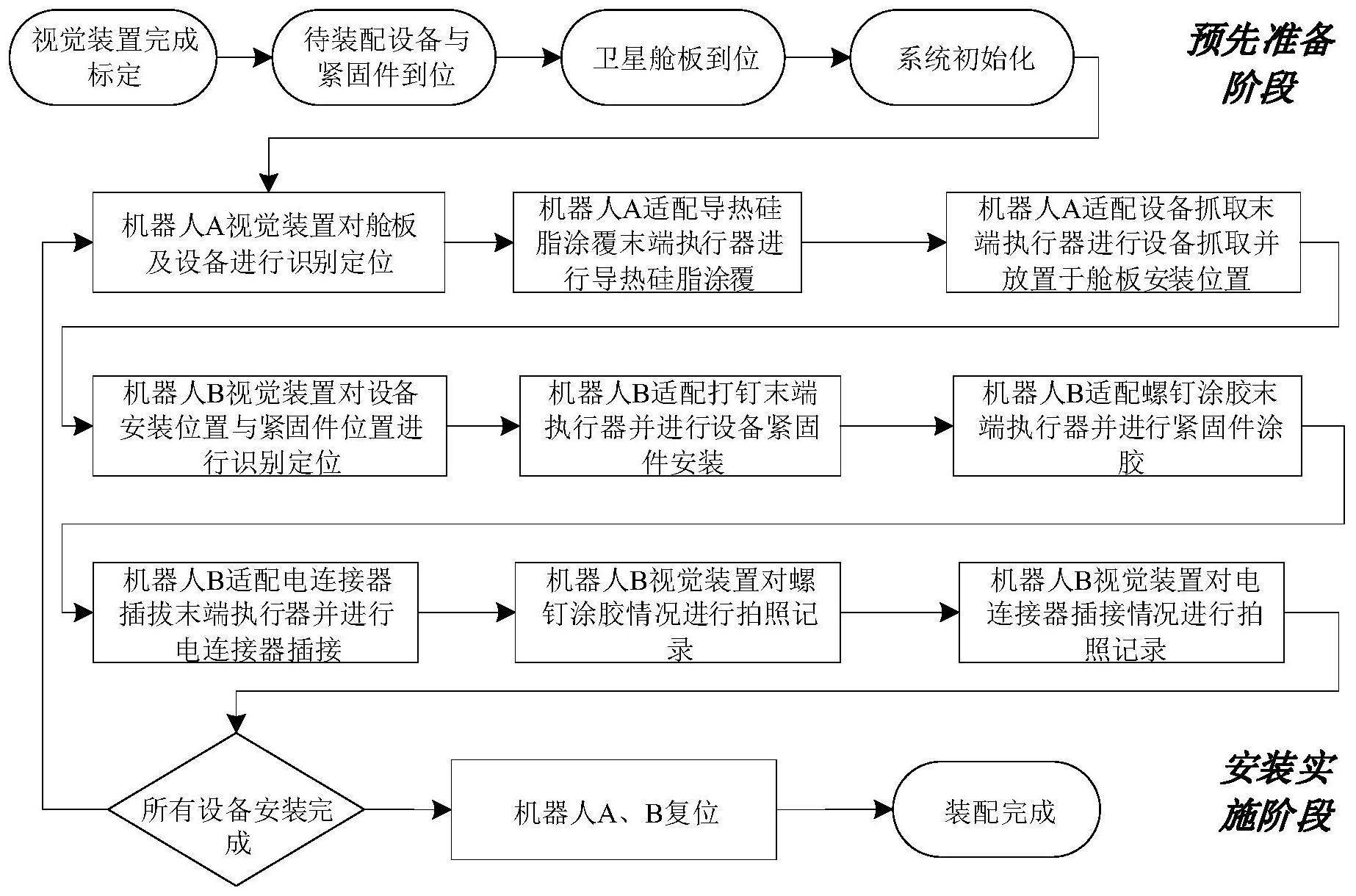
15、s1.对安装在机器人b、机器人a末端的工业相机进行内参标定与手眼标定以获得相机内参矩阵与坐标系转换关系;
16、s2.视觉装置分别对卫星舱板的位置、零部件上料台的位置进行视觉定位,获取卫星舱板及各设备与机器人b、机器人a的相对位置;
17、s3.机器人a与导热硅脂涂覆末端执行器连接并根据视觉装置获取的卫星舱板位置完成各设备安装位置的导热硅脂涂覆,机器人b末端移动到涂覆位置上方,进行拍照记录并上传至卫星生产线控制软件数据库;
18、s4.机器人a与设备抓取末端执行器连接,根据视觉装置获取的设备在零部件上料台中的位置机器人a将待安装设备进行抓取并放置在卫星舱板上对应的安装位置,机器人b末端移动到设备安装位置上方,进行拍照记录并上传至卫星生产线控制软件数据库;
19、s5.视觉装置对螺钉上料台位置进行视觉定位,获取螺钉与机器人b、机器人a的相对位置;
20、s6.视觉装置对舱板设备安装孔位进行视觉定位,获取安装孔位与机器人b、机器人a的相对位置;
21、s7.机器人b与打钉末端执行器连接,根据视觉装置获取的螺钉位置进行取钉并将其移动至设备安装孔上,通过打钉末端执行器将舱板设备与卫星舱板完成紧固操作;
22、s8.机器人b与螺钉涂胶末端执行器连接,对完成舱板设备安装的紧固螺钉处进行涂胶处理,机器人a末端移动到设备安装位置上方,进行拍照记录并上传至卫星生产线控制软件系统数据库;
23、s9.机器人b与电连接器插拔末端执行器连接,将电连接器插接到安装完成的设备接口处,机器人a末端移动到设备电连接器接口上方,进行拍照记录并上传至卫星生产线控制软件系统数据库;
24、s10.重复s3至s9,完成卫星舱板上所有待安装设备的安装。
25、综上所述,由于采用了上述技术方案,本发明的有益效果是:
26、1、本申请中,相对传统人工卫星装配方法,本系统不需要消耗大量人力资源,运行成本低,装配速度与装配精度都得到很大的提高,可以有效解决人工装配效率难以满足卫星生产线批产要求的难题。
27、2、本申请中,相对传统人工卫星装配方法,本系统可以自主安全地完成大质量设备的自动化安装任务,解决人工安装大质量设备时人力资源的过度使用与安全隐患频发的问题。
28、3、本申请中,相对传统人工卫星装配方法,本系统可以同时完成设备安装与检验两种主要任务,解决人工安装所面临的工种交替所带来的效率低下问题。
29、4、本申请中,相对传统人工卫星装配方法,本系统可以使工艺流程更加稳定,提高卫星生产线产品的质量与一致性,为后续相关测试实验的归一化提供可能。
技术特征:
1.一种基于双机器人协同的卫星生产线自动装配系统,包括卫星舱板(2),其特征在于,还包括控制软件系统(1)、螺钉上料台(3)、打钉末端执行器(4)、螺钉涂胶末端执行器(5)、电连接器插拔末端执行器(6)、机器人b(7)、导热硅脂涂覆末端执行器(8)、设备抓取末端执行器(9)、零部件上料台(10)、机器人a(11)、视觉装置(12);
2.根据权利要求1所述的一种基于双机器人协同的卫星生产线自动装配系统,其特征在于,还包括工具快换装置,所述工具快换装置分为公头和母头两部分,所述公头分别与打钉末端执行器(4)、螺钉涂胶末端执行器(5)、电连接器插拔末端执行器(6)、导热硅脂涂覆末端执行器(8)、设备抓取末端执行器(9)以及机器人b(7)其中之一连接,所述母头分别与机器人b(7)、机器人a(11)其中之一连接。
3.根据权利要求1所述的一种基于双机器人协同的卫星生产线自动装配系统,其特征在于,所述视觉装置(12)包括两个工业相机,两个工业相机分别安装在机器人b(7)、机器人a(11)的末端。
4.一种基于双向机器人协同的卫星生产线自动装配的方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于双机器人协同的卫星生产线自动装配系统,包括卫星舱板,还包括控制软件系统、螺钉上料台、打钉末端执行器、螺钉涂胶末端执行器、电连接器插拔末端执行器、机器人B、导热硅脂涂覆末端执行器、设备抓取末端执行器、零部件上料台、机器人A、视觉装置。本发明中,相对传统人工卫星装配方法,本系统不需要消耗大量人力资源,运行成本低,装配速度与装配精度都得到很大的提高,可以有效解决人工装配效率难以满足卫星生产线批产要求的难题;相对传统人工卫星装配方法,本系统可以自主安全地完成大质量设备的自动化安装任务,解决人工安装大质量设备时人力资源的过度使用与安全隐患频发的问题。
技术研发人员:田蔚瀚,刘广通,孟凡伟,孟少华,胡瑞钦,董悫,于洋,魏鹏,谢喜龙,张爽,梁园园,顾一兵
受保护的技术使用者:北京卫星环境工程研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!