一种手动进给结构及特种机器人生产用卧式车床的制作方法
本发明涉及特种机器人生产,具体为一种手动进给结构及特种机器人生产用卧式车床。
背景技术:
1、特种机器人应用于专业领域,一般由经过专门培训的人员操作或使用的,辅助或代替人执行任务的机器人;
2、特种机器人在生产过程中,需要使用卧式车床对特种机器人的零部件进行加工,而卧式车床在操作过程中,需要通过手动进给结构对刀架进行控制;
3、现有手动进给结构的移动是通过丝杆进行实现的,而在加工过程中,切屑会粘附在丝杆的表面,若长时间不进行清理,切屑会随着丝杆进入溜板内,造成手动进给结构移动不再流畅。
技术实现思路
1、本发明的目的在于提供一种手动进给结构及特种机器人生产用卧式车床,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种手动进给结构,所述手动进给结构包括:
3、丝杆,丝杆螺接在溜板的内部,且丝杆的外表面套设有套环;
4、连接板,连接板设置在套环的一侧,连接板的底部设置有清洁板;
5、置物板,置物板设置在连接板的下方,且置物板的内部设置有收集板。
6、优选的,所述丝杆转动设置在卧式车床本体的一端外侧侧壁,丝杆的大小和卧式车床本体的大小相匹配,且丝杆的下方设置有导向杆,导向杆的大小和丝杆的大小相匹配,导向杆固定设置在卧式车床本体的一端侧壁。
7、优选的,所述导向杆插接在溜板的内部,溜板的大小和卧式车床本体的一端侧壁大小相匹配,且溜板的一侧侧壁中心位置转动设置有进给手轮,溜板通过丝杆与导向杆的配合,在卧式车床本体的一端端部滑动。
8、优选的,所述套环的内部大小和丝杆的大小相匹配,且套环设置有两组,两组套环分别固定设置在溜板的两侧侧壁中心位置,两组套环通过溜板在丝杆的外表面滑动设置,且两组套环相互远离的一侧侧壁上端面中心位置开设有第一收纳槽,第一收纳槽呈弧形结构。
9、优选的,所述第一收纳槽的内部插接设置有连接板,连接板的大小和第一收纳槽的内部大小相匹配,且第一收纳槽的内部设置有第二复位弹簧,第二复位弹簧固定设置在连接板的侧壁和第一收纳槽的内壁之间,第二复位弹簧设置有多组,连接板通过多组第二复位弹簧弹性插接在第一收纳槽的内部,且连接板远离第二复位弹簧的一端下表面开设有让位槽。
10、优选的,所述让位槽的下表面设置有清洁板,清洁板的大小和让位槽的大小相匹配,且让位槽的下端面固定设置有第四复位弹簧,第四复位弹簧远离让位槽的一端端部与清洁板的上表面固定连接,第四复位弹簧设置有多组,清洁板通过多组第四复位弹簧弹性设置在让位槽的下表面,且清洁板靠近套环的一侧侧壁开设有斜切面。
11、优选的,所述套环的一端下端面开设有沉槽,沉槽的内部插接设置有置物板,置物板的大小和沉槽的内部大小相匹配,且沉槽的内部设置有第二复位弹簧,第二复位弹簧固定设置在沉槽的内部侧壁和置物板的侧壁之间,第二复位弹簧设置有多组,置物板通过多组第二复位弹簧弹性插接在沉槽的内部。
12、优选的,所述置物板远离第二复位弹簧的一端上表面开设有凹槽,凹槽的内部设置有收集板,收集板的大小和凹槽的内部大小相匹配,且凹槽的内部顶端开设有固定槽,固定槽的内部插接设置有固定块,固定块的大小和固定槽的内部大小相匹配,固定块远离固定槽的一端端部插接在第二收纳槽的内部,第二收纳槽开设在收集板的侧壁中心位置。
13、优选的,所述第二收纳槽的内部大小和固定块的大小相匹配,且固定块的两侧侧壁均固定设置有导向块,两组导向块分别滑动设置在两组导向槽的内部,两组导向槽分别开设在第二收纳槽的内部两侧侧壁,且第二收纳槽的底部滑动设置有抵持块,抵持块与固定块的底部相匹配,且抵持块的一端端部固定连接有插杆,插杆远离抵持块的一端贯穿收集板的侧壁,且插杆的外表面套设有第一复位弹簧,第一复位弹簧固定设置在插杆的端部和收集板的侧壁之间。
14、一种特种机器人生产用卧式车床,包括上述的手动进给结构。
15、与现有技术相比,本发明的有益效果是:
16、本发明提出的一种手动进给结构及特种机器人生产用卧式车床,溜板的移动将会带动套环在丝杆的外表面滑动,滑动过程中,弹性设置的清洁板将会对丝杆的表面进行清洁,清洁下来的灰尘将会掉落到收集板的内部,防止灰尘掉落到其它地方,需要对收集板进行清理时,可直接将收集板从凹槽的内部取出。
技术特征:
1.一种手动进给结构,其特征在于:所述手动进给结构包括:
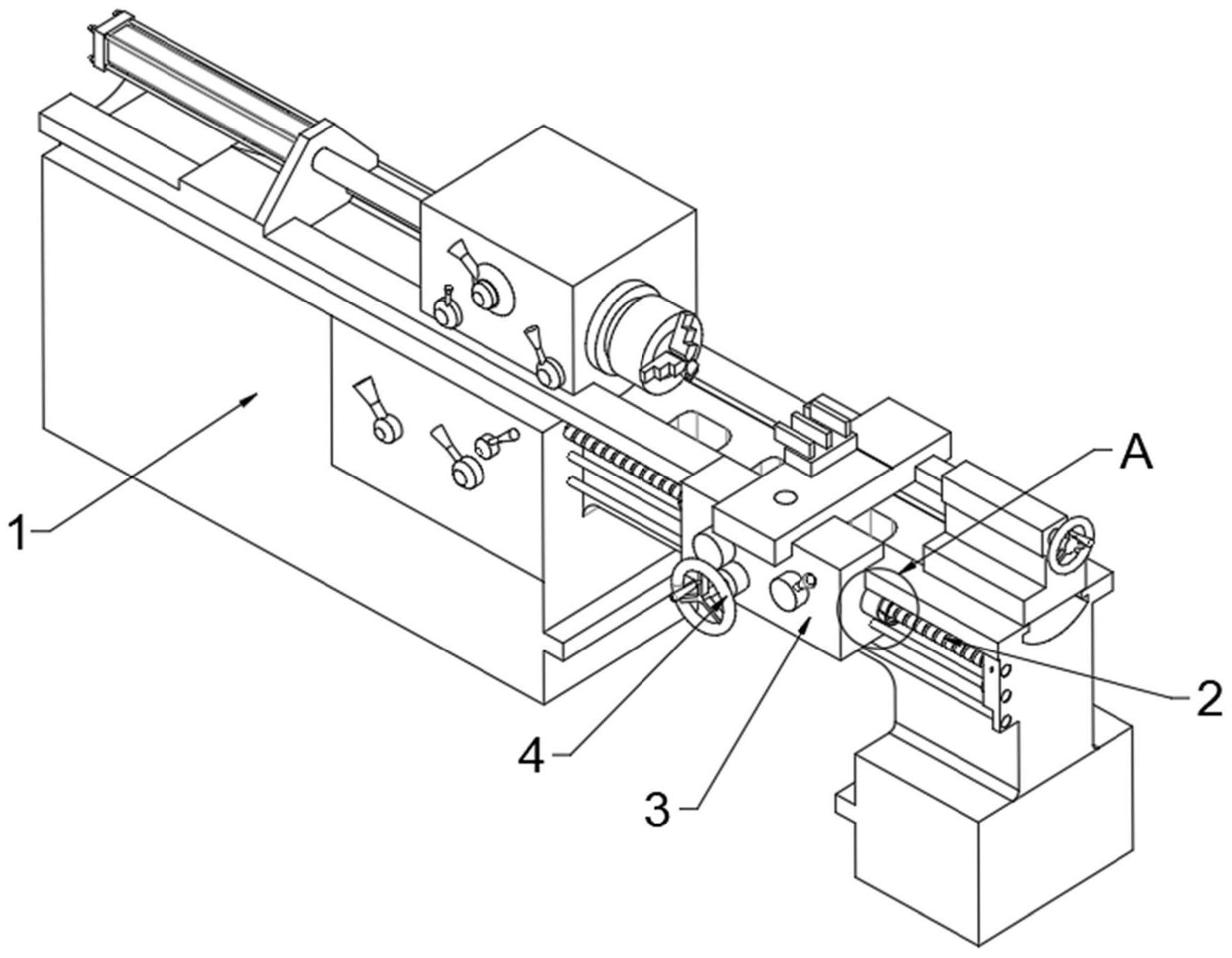
2.根据权利要求1所述的一种手动进给结构,其特征在于:所述丝杆(2)转动设置在卧式车床本体(1)的一端外侧侧壁,丝杆(2)的大小和卧式车床本体(1)的大小相匹配,且丝杆(2)的下方设置有导向杆(5),导向杆(5)的大小和丝杆(2)的大小相匹配,导向杆(5)固定设置在卧式车床本体(1)的一端侧壁。
3.根据权利要求2所述的一种手动进给结构,其特征在于:所述导向杆(5)插接在溜板(3)的内部,溜板(3)的大小和卧式车床本体(1)的一端侧壁大小相匹配,且溜板(3)的一侧侧壁中心位置转动设置有进给手轮(4),溜板(3)通过丝杆(2)与导向杆(5)的配合,在卧式车床本体(1)的一端端部滑动。
4.根据权利要求3所述的一种手动进给结构,其特征在于:所述套环(6)的内部大小和丝杆(2)的大小相匹配,且套环(6)设置有两组,两组套环(6)分别固定设置在溜板(3)的两侧侧壁中心位置,两组套环(6)通过溜板(3)在丝杆(2)的外表面滑动设置,且两组套环(6)相互远离的一侧侧壁上端面中心位置开设有第一收纳槽(18),第一收纳槽(18)呈弧形结构。
5.根据权利要求4所述的一种手动进给结构,其特征在于:所述第一收纳槽(18)的内部插接设置有连接板(7),连接板(7)的大小和第一收纳槽(18)的内部大小相匹配,且第一收纳槽(18)的内部设置有第二复位弹簧(17),第二复位弹簧(17)固定设置在连接板(7)的侧壁和第一收纳槽(18)的内壁之间,第二复位弹簧(17)设置有多组,连接板(7)通过多组第二复位弹簧(17)弹性插接在第一收纳槽(18)的内部,且连接板(7)远离第二复位弹簧(17)的一端下表面开设有让位槽(14)。
6.根据权利要求5所述的一种手动进给结构,其特征在于:所述让位槽(14)的下表面设置有清洁板(15),清洁板(15)的大小和让位槽(14)的大小相匹配,且让位槽(14)的下端面固定设置有第四复位弹簧(19),第四复位弹簧(19)远离让位槽(14)的一端端部与清洁板(15)的上表面固定连接,第四复位弹簧(19)设置有多组,清洁板(15)通过多组第四复位弹簧(19)弹性设置在让位槽(14)的下表面,且清洁板(15)靠近套环(6)的一侧侧壁开设有斜切面(20)。
7.根据权利要求6所述的一种手动进给结构,其特征在于:所述套环(6)的一端下端面开设有沉槽(9),沉槽(9)的内部插接设置有置物板(8),置物板(8)的大小和沉槽(9)的内部大小相匹配,且沉槽(9)的内部设置有第二复位弹簧(16),第二复位弹簧(16)固定设置在沉槽(9)的内部侧壁和置物板(8)的侧壁之间,第二复位弹簧(16)设置有多组,置物板(8)通过多组第二复位弹簧(16)弹性插接在沉槽(9)的内部。
8.根据权利要求7所述的一种手动进给结构,其特征在于:所述置物板(8)远离第二复位弹簧(16)的一端上表面开设有凹槽(11),凹槽(11)的内部设置有收集板(10),收集板(10)的大小和凹槽(11)的内部大小相匹配,且凹槽(11)的内部顶端开设有固定槽(21),固定槽(21)的内部插接设置有固定块(22),固定块(22)的大小和固定槽(21)的内部大小相匹配,固定块(22)远离固定槽(21)的一端端部插接在第二收纳槽(23)的内部,第二收纳槽(23)开设在收集板(10)的侧壁中心位置。
9.根据权利要求8所述的一种手动进给结构,其特征在于:所述第二收纳槽(23)的内部大小和固定块(22)的大小相匹配,且固定块(22)的两侧侧壁均固定设置有导向块(26),两组导向块(26)分别滑动设置在两组导向槽(24)的内部,两组导向槽(24)分别开设在第二收纳槽(23)的内部两侧侧壁,且第二收纳槽(23)的底部滑动设置有抵持块(25),抵持块(25)与固定块(22)的底部相匹配,且抵持块(25)的一端端部固定连接有插杆(12),插杆(12)远离抵持块(25)的一端贯穿收集板(10)的侧壁,且插杆(12)的外表面套设有第一复位弹簧(13),第一复位弹簧(13)固定设置在插杆(12)的端部和收集板(10)的侧壁之间。
10.一种特种机器人生产用卧式车床,其特征在于:包括上述权利要求1-9任意一项所述的手动进给结构。
技术总结
本发明涉及特种机器人生产技术领域,具体为一种手动进给结构及特种机器人生产用卧式车床,包括:丝杆,螺接在溜板的内部,且丝杆的外表面套设有套环;连接板,设置在套环的一侧,连接板的底部设置有清洁板;置物板,设置在连接板的下方,且置物板的内部设置有收集板;有益效果为:溜板的移动将会带动套环在丝杆的外表面滑动,滑动过程中,弹性设置的清洁板将会对丝杆的表面进行清洁,清洁下来的灰尘将会掉落到收集板的内部,防止灰尘掉落到其它地方,需要对收集板进行清理时,可直接将收集板从凹槽的内部取出。
技术研发人员:戴安娜
受保护的技术使用者:江苏宇航智能制造研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!