一种自动化工件切割设备的制作方法
本发明属于工件切割,具体涉及一种自动化工件切割设备。
背景技术:
1、金属管道在加工的过程中需要进行切割工序,由于工艺需求,金属管在日常使用中往往需要根据使用的长度对其进行切断。
2、现有的金属管切割通常都是人工手持切割机进行切割,劳动强度大,工作效率低,且切割长度不能保证,切割时容易会出现偏移,部分金属管道在加工时需要进行定长切割,而一般的切割设备大多不具备定长功能,使用时需要人工进行测量,操作起来较为繁琐。
3、部分切割设备具备定长功能,但却不能够方便地进行切割长度的调节,具有一定的局限性,在切割的过程中产生大量的铁屑易进入操作人员的眼睛,对操作人员自身的安全造成威胁,不便于人们的使用。
4、因此,针对上述技术问题,有必要提供一种自动化工件切割设备。
技术实现思路
1、本发明的目的在于提供一种自动化工件切割设备,以解决上述的问题。
2、为了实现上述目的,本发明一实施例提供的技术方案如下:
3、一种自动化工件切割设备,包括:
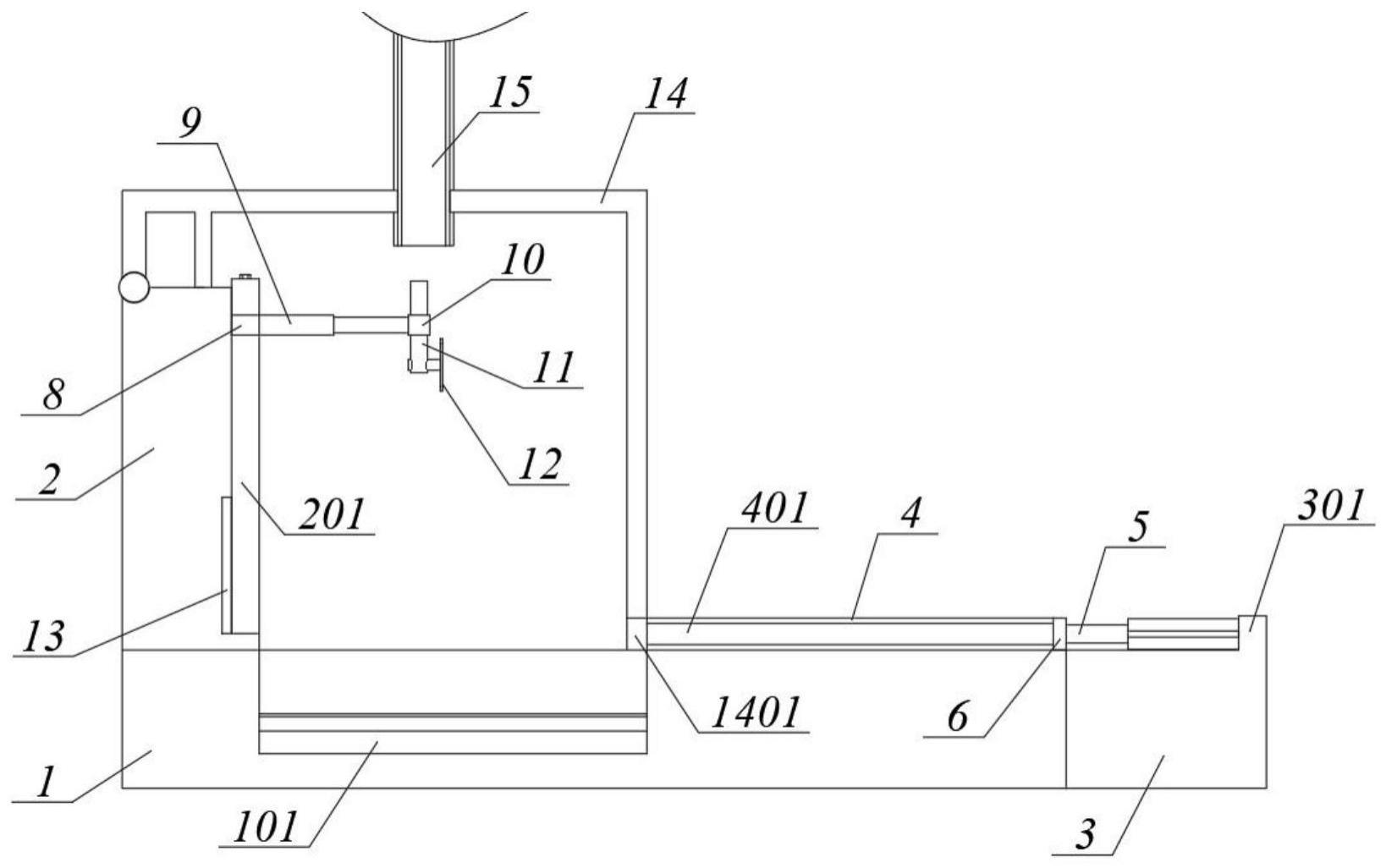
4、底座,所述底座的上端安装有夹持机构,所述底座的一侧安装有推送机构,所述底座的上端开设有放置槽;
5、第一固定部,所述第一固定部安装在底座远离推送机构的一端,所述第一固定部上滑动连接有切割机构;
6、防护壳,所述防护壳能够将切割机构完全覆盖,所述防护壳的上端安装有连接管,所述连接管能够吸附防护壳内的飞屑。
7、作为本发明的进一步改进,所述放置槽内固定连接有多个隔板,所述放置槽的底壁为倾斜设置,所述放置槽的一端贯穿底座。
8、作为本发明的进一步改进,所述夹持机构包括卡条,所述卡条上开设有弧形槽,一对卡条之间形成限位槽,所述管状工件夹持在限位槽内。
9、作为本发明的进一步改进,所述推送机构包括第二固定部和第一油缸,所述第二固定部上固定连接有凸条,所述第一油缸的一端与凸条为焊接,所述第一油缸上固定连接有橡胶块。
10、作为本发明的进一步改进,所述切割机构包括滑块、第二油缸、活动部、活动杆和切割轮,所述滑块滑动连接在第一固定部上,所述活动部固定连接在第二油缸远离滑块的一端,所述活动杆滑动连接在活动部内,所述切割轮转动连接在活动杆的下端。
11、作为本发明的进一步改进,所述第一固定部上开设有多个滑槽,所述滑块滑动连接在滑槽内。
12、作为本发明的进一步改进,所述滑槽的上端插接有固定块,所述固定块上开设有多个第一螺纹,所述第一固定部的上端开设有与第一螺纹相匹配的第二螺纹孔,所述第一螺纹、第二螺纹孔依次螺纹连接有螺栓。
13、作为本发明的进一步改进,所述防护壳转动连接在第一固定部的上端,所述防护壳和第一固定部之间安装有连接杆。
14、作为本发明的进一步改进,所述防护壳上开设有与橡胶块相匹配的通孔。
15、作为本发明的进一步改进,所述第一固定部靠近切割轮的一侧安装有多个与夹持机构相匹配的重力感应模块。
16、与现有技术相比,本发明具有以下优点:
17、本发明能够自动调节管道切割的长度,同时能够便于将管道切割成相同长度的管道,不需要人工对切割长度进行测量,大幅度减少加工时测量切割长度浪费的大量时间,操作简单,同时还能够避免飞屑对人造成伤害的情况。
技术特征:
1.一种自动化工件切割设备,其特征在于,包括:
2.根据权利要求1所述的一种自动化工件切割设备,其特征在于,所述放置槽内固定连接有多个隔板,所述放置槽的底壁为倾斜设置,所述放置槽的一端贯穿底座。
3.根据权利要求1所述的一种自动化工件切割设备,其特征在于,所述夹持机构包括卡条,所述卡条上开设有弧形槽,一对卡条之间形成限位槽,所述管状工件夹持在限位槽内。
4.根据权利要求1所述的一种自动化工件切割设备,其特征在于,所述推送机构包括第二固定部和第一油缸,所述第二固定部上固定连接有凸条,所述第一油缸的一端与凸条为焊接,所述第一油缸上固定连接有橡胶块。
5.根据权利要求1所述的一种自动化工件切割设备,其特征在于,所述切割机构包括滑块、第二油缸、活动部、活动杆和切割轮,所述滑块滑动连接在第一固定部上,所述活动部固定连接在第二油缸远离滑块的一端,所述活动杆滑动连接在活动部内,所述切割轮转动连接在活动杆的下端。
6.根据权利要求5所述的一种自动化工件切割设备,其特征在于,所述第一固定部上开设有多个滑槽,所述滑块滑动连接在滑槽内。
7.根据权利要求6所述的一种自动化工件切割设备,其特征在于,所述滑槽的上端插接有固定块,所述固定块上开设有多个第一螺纹,所述第一固定部的上端开设有与第一螺纹相匹配的第二螺纹孔,所述第一螺纹、第二螺纹孔依次螺纹连接有螺栓。
8.根据权利要求1所述的一种自动化工件切割设备,其特征在于,所述防护壳转动连接在第一固定部的上端,所述防护壳和第一固定部之间安装有连接杆。
9.根据权利要求1或8所述的一种自动化工件切割设备,其特征在于,所述防护壳上开设有与橡胶块相匹配的通孔。
10.根据权利要求1所述的一种自动化工件切割设备,其特征在于,所述第一固定部靠近切割轮的一侧安装有多个与夹持机构相匹配的重力感应模块。
技术总结
本发明揭示了一种自动化工件切割设备,属于工件切割技术领域,包括底座、第一固定部和防护壳是,所述底座的上端安装有夹持机构,所述底座的一侧安装有推送机构,所述底座的上端开设有放置槽;所述第一固定部安装在底座远离推送机构的一端,所述第一固定部上滑动连接有切割机构;所述防护壳能够将切割机构完全覆盖,所述防护壳的上端安装有连接管,所述连接管能够吸附防护壳内的飞屑,所述放置槽内固定连接有多个隔板。本发明能够自动调节管道切割的长度,同时能够便于将管道切割成相同长度的管道,不需要人工对切割长度进行测量,大幅度减少加工时测量切割长度浪费的大量时间,操作简单,同时还能够避免飞屑对人造成伤害的情况。
技术研发人员:杨正荣,温芹罗,杨晓永
受保护的技术使用者:连云港振荣传动件有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!