清根工艺、清根机器人及清根系统的制作方法
本发明涉及焊接,尤其涉及一种清根工艺、清根机器人及清根系统。
背景技术:
1、焊接有着广泛的应用,特别是大型结构件的焊接质量有着严格的要求,很多大型结构件在清根过程中,由于焊接质量要求,需要保证全熔透,进而需要进行清根处理以保证焊接质量。以目前最先进的等离子气刨机清根为例,由于清根设备一次清根的宽度和深度是一定限度的,一次清根操作不能满足质量要求,对一些大型结构件需要两次或两次以上清根操作,但是两次以及两次以上的清根操作在效率、时间、成本等方面都随之增加。
技术实现思路
1、本发明的目的在于提出一种清根工艺、清根机器人及清根系统,解决了现有技术中对焊缝进行清根操作存在效率低下,时间以及成本增加的技术问题。
2、为达此目的,本发明采用以下技术方案:
3、本发明提供一种清根工艺,通过清根机器人对焊缝进行清根,所述清根机器人包括沿其前后方向依次设置的至少两个清根装置,所述清根工艺包括以下步骤:
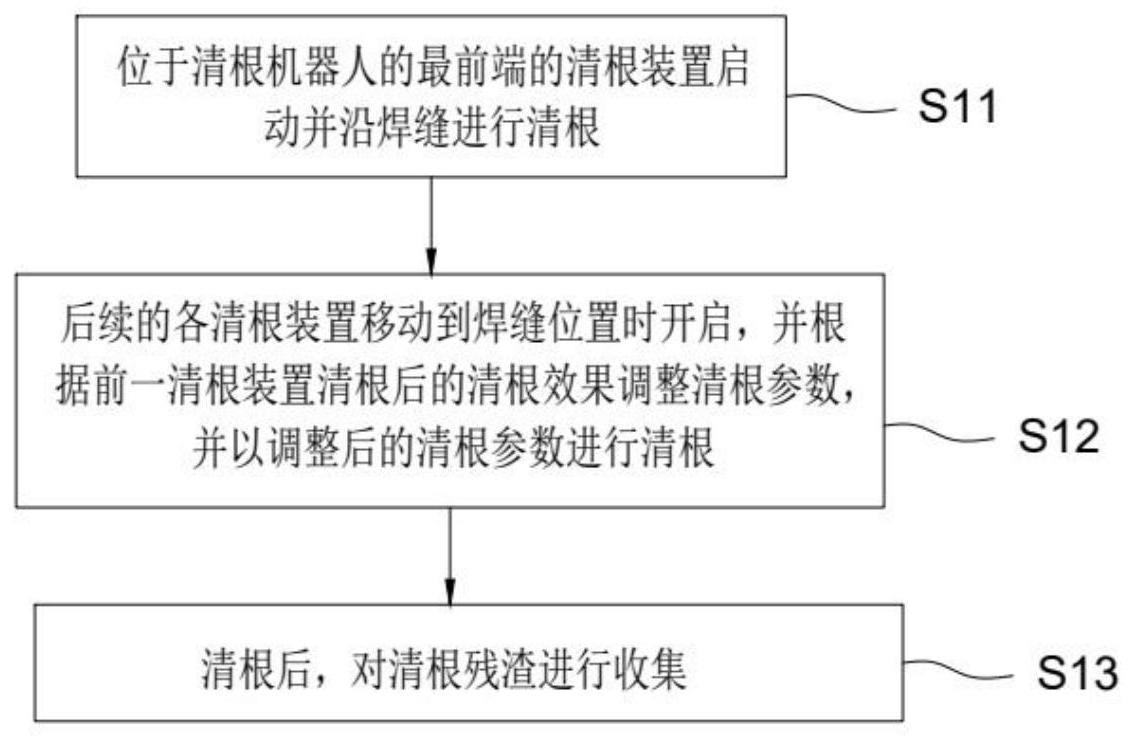
4、位于所述清根机器人的最前端的所述清根装置启动并沿焊缝进行清根;
5、后续的各所述清根装置移动到所述焊缝位置时开启,并根据前一所述清根装置清根后的清根效果调整清根参数,并以调整后的清根参数进行清根;
6、清根后,对清根残渣进行收集。
7、该清根工艺通过清根机器人对焊缝进行清根处理,清根机器人包括沿其前后方向依次设置的至少两个清根装置,位于清根机器人的最前端的清根装置启动并沿焊缝进行清根,后续的各清根装置移动到焊缝位置时开启,并根据前一清根装置清根后的清根效果调整清根参数,并以调整后的清根参数进行清根,清根机器人沿着焊缝进行移动即可实现对焊缝的有效清根,达到要求的清根效果,避免清根机器人重复行走,提高了清根效率,降低了时间以及成本。
8、作为上述清根工艺的一种优选方案,所述清根机器人获取各所述清根装置清根后的焊缝图像,以得出各所述清根装置清根后的效果。
9、清根机器人通过获取各清根装置清根后的焊缝图像,以根据焊缝图像可以得出各清根装置清根后的效果,进而根据清根效果调整清根参数并以调整后的清根参数进行清根,该获取清根效果的方式较为简单、便捷。
10、作为上述清根工艺的一种优选方案,清根后,通过收集机器人对清根残渣进行收集。
11、清根后,通过收集机器人对清根残渣进行收集,避免引起安全隐患。
12、作为上述清根工艺的一种优选方案,所述收集机器人与所述清根机器人通讯连接,所述收集机器人随动于所述清根机器人,以对清根残渣进行收集;和/或所述收集机器人与遥控装置通讯连接,通过所述遥控装置控制所述收集机器人的启闭及移动。
13、收集机器人与清根机器人通讯连接,通过收集机器人随动于清根机器人,在清根后对残渣进行清理;收集机器人与遥控装置通讯连接,通过遥控装置控制收集机器人的启闭及移动,以实现对收集机器人的操控。
14、作为上述清根工艺的一种优选方案,所述收集机器人收集残渣时,所述收集机器人的收集装置磁化,以吸附所述残渣;
15、残渣清理完毕后,所述收集装置去磁,以将所述残渣脱离所述收集装置进行收集处理。
16、收集机器人的收集装置磁化能够将残渣进行吸附,防止残渣洒落;残渣清理完毕后,收集装置去磁,以便于将收集的残渣进行收集处理。
17、作为上述清根工艺的一种优选方案,清根后,通过手动清理装置对残渣进行清理,所述手动清理装置与所述收集机器人通讯连接,所述收集机器人感应所述手动清理装置的位置,并移动到所述手动清理装置位置处以对该位置的残渣进行收集。
18、手动清理装置对残渣进行清理,提高清理的效果,手动清理装置与收集机器人通讯连接,收集机器人感应手动清理装置的位置,并移动到手动清理装置位置处以对该位置的残渣进行收集,实现了残渣的自动收集,提高了清理的效率和现场生产作业的安全。
19、本发明还提供一种清根机器人,包括机器人主体以及设置于所述机器人主体并沿所述机器人主体的前后方向依次排布的至少两个清根装置,各组所述清根装置能够沿所述机器人主体的横向方向移动。
20、该清根机器人通过沿机器人主体的前后方向依次排布的至少两个清根装置,清根机器人沿着焊缝进行移动即可实现对焊缝的有效清根,达到要求的清根效果,避免清根机器人重复行走,提高了清根效率。
21、作为上述清根机器人的一种优选方案,各组所述清根装置设置于所述机器人主体的侧边或设置于所述机器人主体的端部。
22、各组清根装置设置于机器人主体的侧边或者机器人主体的端部,以便于清根装置能够沿着焊缝进行清根操作。
23、作为上述清根机器人的一种优选方案,所述清根机器人还包括:
24、图像获取装置,所述图像获取装置设置于所述机器人主体,所述图像获取装置与所述清根装置均与所述机器人主体的控制装置电连接。
25、图像获取装置的设置能够获取焊缝图像,以对清根后的效果进行获取。
26、本发明还提供一种清根系统,包括上述的清根机器人,还包括:
27、收集机器人,所述收集机器人与所述清根机器人通讯连接,或所述收集机器人与遥控装置通讯连接;及
28、手动清理装置,所述手动清理装置与所述收集机器人通讯连接,所述收集机器人被配置为能够感应所述手动清理装置的位置,并移动到所述手动清理装置位置处以对该位置的残渣进行收集。
29、该清根系统包括收集机器人和手动清理装置,收集机器人与清根装置通讯连接或与控制装置通讯连接,以实现对收集机器人的控制;手动清理装置能够有效清理残渣,通过与收集机器人通讯连接,收集机器人感应清理装置的位置,并移动到手动清理装置位置处以对该位置的残渣进行清理,提高清理效率和现场生产作业的安全。
30、本发明的有益效果:
31、本发明提出的清根工艺,清根工艺通过清根机器人对焊缝进行清根处理,清根机器人包括沿其前后方向依次设置的至少两个清根装置,位于清根机器人的最前端的清根装置启动并沿焊缝进行清根,后续的各清根装置移动到焊缝位置时开启,并根据前一清根装置清根后的清根效果调整清根参数,并以调整后的清根参数进行清根,清根机器人沿着焊缝进行移动即可实现对焊缝的有效清根,达到要求的清根效果,避免清根机器人重复行走,提高了清根效率,降低了时间以及成本。
32、本发明提供的清根机器人,通过沿机器人主体的前后方向依次排布的至少两个清根装置,清根机器人沿着焊缝进行移动即可实现对焊缝的有效清根,达到要求的清根效果,避免清根机器人重复行走,提高了清根效率,降低了时间以及成本。
33、本发明提供的清根系统,包括收集机器人和手动清理装置,收集机器人与清根装置通讯连接或与控制装置通讯连接,以实现对收集机器人的控制;手动清理装置能够有效清理残渣,通过与收集机器人通讯连接,收集机器人感应清理装置的位置,并移动到手动清理装置位置处以对该位置的残渣进行清理,提高清理效率和现场生产作业的安全。
- 还没有人留言评论。精彩留言会获得点赞!