一种导杆与钢爪自动焊接辅助装卡平台的制作方法
1.本实用新型涉及一种导杆与钢爪自动焊接辅助装卡平台。
背景技术:
2.铝导杆、钢爪与炭块组成的阳极结构在铝电解生产过程中起着重要的导电作用,而铝导杆与钢爪共同承担着炭块重量,因此铝导杆和钢爪之间的有效连接对电解生产中电流畅通、电流的均匀性及承重性能的影响至关重要。铝导杆和钢爪一般通过焊接方式连接,现有技术中是将中间过渡块先焊接在阳极钢爪上,此步骤无须工装辅助,而铝导杆与过渡块焊接时需要工装进行辅助,工装为落地铁架,铁架两侧为三角支架,两侧支架通过两根角铁进行连接,两根角铁中间分别设置两根角铁稳定导杆,并且端口钻孔,然后放置圆钢稳定导杆,使用时将钢爪吊装至稳定角铁中心正下部,将铝导杆吊装至稳定角铁内部并插入圆钢,然后人工在下部进行焊接。该种方式缺点包括:(1)焊接前准备工作时间长,钢爪与过渡块之间矫正时间长、精度低、难度大、危险系数高。(2)操作过程中需要操作人员不断更换工作位置,工作程序复杂,效率低。另外由于整个行业对自动化等方面的需求,目前焊接形式也由人工焊接逐渐转变成自动化焊接,而自动化焊接生产线就需要配置辅助工装进行焊接,以保证焊接的可持续性、焊接质量及满足焊接过程的自由度,但现有技术中的辅助工装难以满足要求。
技术实现要素:
3.本实用新型的目的在于提供一种导杆与钢爪自动焊接辅助装卡平台,能够保证钢爪定位准确、稳定且焊接区域平整,并且满足自动化生产线的使用要求。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种导杆与钢爪自动焊接辅助装卡平台,包括底板、夹具、固定环和调平螺栓,其中所述底板中部设有夹具,所述底板前后两侧均设有多个固定环,且固定环内设有调平螺栓,待焊接的钢爪爪腿端部分别置于对应的固定环中,并且钢爪通过所述调平螺栓调平。
6.所述底板两侧均设有第一固定环和第二固定环,且第二固定环设于对应侧的两个第一固定环之间,所述第一固定环内设有第一调平螺栓,所述第二固定环内设有第二调平螺栓。
7.八爪钢爪焊接时,八爪钢爪座体设于夹具上侧,各个八爪钢爪腿均设于夹具外侧,并且位于八爪钢爪座体各个角端的八爪钢爪腿端部分别置于对应的第一固定环中并与对应的第一调平螺栓相抵。
8.四爪钢爪焊接时,四爪钢爪座体设于夹具上侧,四爪钢爪座体两端的四爪钢爪腿下端分别置于对应的第二固定环中并与对应的第二调平螺栓相抵,四爪钢爪座体中部的各个四爪钢爪腿通过所述夹具夹紧固定。
9.所述夹具包括设于所述底板上的固定夹块和移动夹块,且所述固定夹块和移动夹块的相邻侧均设有夹槽,四爪钢爪座体中部的各个四爪钢爪腿分别通过对应的夹槽夹紧固
定。
10.所述夹具包括设于所述底板上的固定夹块和移动夹块,其中固定夹块中部设有丝杠穿过所述移动夹块,并且所述移动夹块内部设有螺纹孔与所述丝杠配合,所述丝杠端部形成驱动手柄。
11.所述底板左右两侧均设有滑轮,且所述滑轮分别沿着对应侧的轨道移动。
12.本实用新型的优点与积极效果为:
13.1、本实用新型利用固定环将钢爪爪腿定位,并利用固定环中部的调平螺栓调整各个钢爪爪腿下端高度,从而能够保证钢爪定位准确且焊接区域平整,从而大大缩短了焊接前的准备工作时间,并且调整方便,也方便焊接,降低操作危险系数的同时也提高了操作效率。
14.2、本实用新型可用于八爪钢爪和四爪钢爪定位,使用更加灵活,并且八爪钢爪焊接时,四个第一固定环分别套装于对应的八爪钢爪腿上,保证焊接同时也能够抵消后续铣削产生的应力,保证八爪钢爪始终处于稳定状态,而四爪钢爪焊接时,则利用底板上的夹具配合两端的第二固定环固定四爪钢爪以抵消后续铣削应力,保证四爪钢爪始终处于稳定状态,最终保证钢爪与铝导杆焊接的一致性,满足自动化生产线的焊接和后续加工需要。
15.3、本实用新型的底板下侧设有滑轮沿着轨道移动,可满足自动化生产线不同工序之间的转运要求。
附图说明
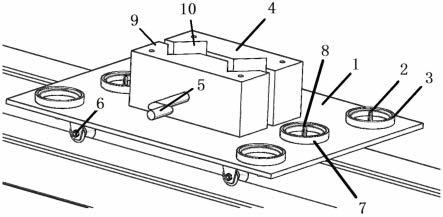
16.图1为本实用新型的结构示意图,
17.图2为本实用新型焊接八爪钢爪时的状态示意图,
18.图3为本实用新型焊接四爪钢爪时的状态示意图。
19.其中,1为底板,2为第一调平螺栓,3为第一固定环,4为固定夹块,5为驱动手柄,6为滑轮,7为第二固定环,8为第二调平螺栓,9为移动夹块,10为夹槽,11为八爪钢爪座体,12为八爪钢爪腿,13为四爪钢爪座体,14为四爪钢爪腿。
具体实施方式
20.下面结合附图对本实用新型作进一步详述。
21.如图1~3所示,本实用新型包括底板1、夹具、固定环和调平螺栓,其中如图1所示,所述底板1中部设有夹具,所述底板1前后两侧均设有多个固定环,且固定环中部设有调平螺栓,待焊接的钢爪爪腿端部分别置于对应的固定环中,并且钢爪通过所述调平螺栓调平,以保证焊接区域平整。
22.如图1~3所示,所述底板1两侧均设有第一固定环3和第二固定环7,且第二固定环7设于对应侧的两个第一固定环3之间,所述第一固定环3中部设有第一调平螺栓2,所述第二固定环7中部设有第二调平螺栓8。本实用新型主要用于八爪钢爪和四爪钢爪焊接,其中如图2所示,八爪钢爪焊接时,八爪钢爪座体11设于夹具上侧,各个八爪钢爪腿12均设于夹具外侧,其中位于八爪钢爪座体11各个角端的四个八爪钢爪腿12端部分别置于对应的第一固定环3中并与对应的第一调平螺栓2相抵,而四爪钢爪焊接时,如图3所示,四爪钢爪座体13设于夹具上侧,并且四爪钢爪座体13两端的四爪钢爪腿14下端分别置于对应的第二固定
环7中并与对应的第二调平螺栓8相抵,四爪钢爪座体13中部的各个四爪钢爪腿14通过所述夹具夹紧固定。本实施例中,每个固定环中部的底板1上钻孔攻丝用于安装调平螺栓,以便于长期磨损后更换调平螺栓,并且调平螺栓高度不高于固定环高度,以使钢爪爪腿始终容置于对应的固定环实现限位。
23.如图1所示,本实施例中,所述夹具包括设于所述底板1上的固定夹块4和移动夹块9,其中固定夹块4中部设有丝杠穿过所述移动夹块9,并且所述移动夹块9内部设有螺纹孔与所述丝杠配合,所述丝杠端部形成驱动手柄5,使用时操作人员旋转所述驱动手柄5即驱动所述丝杠转动,所述丝杠转动即驱动所述移动夹块9移动,进而驱动移动夹块9与所述固定夹块4闭合夹紧或分离,在所述固定夹块4和移动夹块9的相邻侧均设有v型的夹槽10,如图3所示,四爪钢爪焊接时,四爪钢爪座体13中部的各个四爪钢爪腿14分别通过对应的夹槽10夹紧固定。本实施例中,所述固定夹块4通过螺栓固装于所述底板1上,以便于根据实际需要拆装,所述固定夹块4也可以通过焊接方式固设于所述底板1上。
24.如图1所示,所述底板1左右两侧均设有滑轮6分别沿着对应侧的轨道移动,所述轨道可设置于自动化生产线上,从而方便生产线上不同工序之间的运输。所述滑轮6可采用自锁滑轮,当钢爪焊接时,所述滑轮6锁定无法移动,钢爪焊接完毕后,滑轮6解锁,工作人员将底板1推送至下一工序,所述自锁滑轮为本领域公知技术且为市购产品。另外为了满足自动化生产要求,所述底板1下侧也可以设置电机等驱动装置驱动对应的滑轮6转动,其余滑轮6为从动滑轮,从而使所述底板1形成类似移动小车结构,可自动控制底板1在各个工序之间移动,满足自动化生产线使用要求。
25.本实用新型的工作原理为:
26.本实用新型利用固定环将钢爪爪腿定位,以保证钢爪定位准确,进而保证钢爪上的焊接区域定位准确,并利用固定环中部的调平螺栓调整各个钢爪爪腿下端高度,再配合水平尺等装置实现钢爪焊接工作区域表面平整,从而大大缩短了焊接前的准备工作时间,并且调整方便,也方便焊接,降低操作危险系数的同时也提高了操作效率。另外由于后续工序中存在铣削工序,如图2所示,八爪钢爪焊接时,四个第一固定环3分别套装于对应的八爪钢爪腿12上,从而在进行铣削工序时,各个第一固定环3能够抵消铣削产生的应力,保证钢爪稳定,而如图3所示,四爪钢爪焊接时,由于四爪钢爪不具有八爪钢爪的稳定性,在铣削工序时容易侧倒,因此本实用新型在底板1上设置夹具对四爪钢爪中部的钢爪腿夹紧固定,从而抵消铣削工序应力,保证四爪钢爪的稳定性,最终保证钢爪与铝导杆焊接的一致性,满足自动化生产线的焊接和后续加工需要,另外本实用新型的底板1下侧设有滑轮6沿着对应轨道移动,可满足自动化生产线不同工序之间的转运要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1