一种五轴机器人激光焊接结构的制作方法
1.本实用新型涉及机器人激光焊接技术领域,尤其是一种五轴机器人激光焊接结构。
背景技术:
2.随着激光焊接技术的日益发展,因激光焊接操作简单、变形小、焊接速度快、效率高、焊缝平整美观、焊后无需处理或简单处理等优势被广泛地应用于焊接工艺行业;为了能更进一步的提高激光焊接工作效率,大部分焊接机器人厂商将激光焊枪安装在了机器人末端使用,即配合机器人在空间内多姿态作业,进行高效焊接代替人工手持激光焊接。
3.然而,针对需要填丝焊接的应用场景,通常大部分厂家将激光焊枪安装在机器人末端执行使用,作送焊丝功能用的送丝杆因没有合适的安装位置只能安装于激光焊枪上面,两者同步随动,而在实际焊接过程中送丝杆不能单独旋转使得送丝角度单一,而且为了能寻找更好的送丝角度就需要控制激光焊枪的姿态从而带动送丝角度,如此则需同时避免激光焊枪和送丝杆与工件的干涉风险,从而操作难度也随之提高。
技术实现要素:
4.本技术针对上述现有技术中的缺点,提供一种结构合理的五轴机器人激光焊接结构,从而在五轴机器人末端执行端安装激光焊枪时,避免送丝杆随动于激光焊枪的工作轨迹,使得送丝杆能够独立围绕激光焊枪进行360度旋转送丝。
5.本实用新型所采用的技术方案如下:
6.一种五轴机器人激光焊接结构,包括五轴机器人,所述五轴机器人末端具有腕部,所述腕部呈环状,穿设于所述腕部设置有激光焊枪;所述腕部具有驱动件或具有与所述五轴机器人第五轴传动连接的传动件以使得腕部能够作旋转运动;所述腕部朝向激光焊枪工作端设置送丝机构以使得送丝机构在腕部的驱动下能够围绕激光焊枪做旋转运动。
7.进一步地,所述送丝机构包括固设于腕部表面的安装件,所述安装件表面连接设置加长轴向距离的第一夹持件,所述第一夹持件的下方设置延长纵向距离的延长件,所述延长件的末端通过调节块活动连接第二夹持件,所述第二夹持件具有通孔,所述通孔内固设送丝杆。
8.进一步地,所述送丝杆呈倾斜设置且其出丝端与所述激光焊枪的焊接端交集于一点。
9.进一步地,所述安装件为法兰盘。
10.进一步地,所述激光焊枪与腕部间通过设置于腕部背面的安装盘连接。
11.本实用新型的有益效果如下:
12.1.本实用新型通过在五轴机器人末端执行端设置第六轴,或将六轴机器人的第五轴用作执行端;从而将激光焊枪安装在第五轴腕部,将送丝杆安装在机器人六轴末端法兰,围绕激光焊枪头进行360度旋转送丝,从而避免了现有因为送丝杆与焊枪随动造成的姿态
不易调节、干涉风险大的问题;
13.2.干涉风险小、使用范围广:因此结构送丝杆可围绕激光焊枪头360度旋转送丝,在焊接一些小空间的工件时,送丝角度大可有效地避开干涉点,固干涉风险小、使用范围广;
14.3.小角度连续焊接:在焊接一些小角度工件转角点时,激光焊枪不需要停顿来变化更佳送丝姿态,此时可旋转的送丝杆设计结构可独立完成更快,更好得送丝角度进行送丝,从而实现小角度的连续焊接;
15.4.工作效率高:设计的送丝杆旋转结构,在焊接的同时能围绕激光焊枪头变化更多更有效地角度来进行送丝且规避干涉,使得在焊接过程中可以连贯焊接,提高工作效率。
附图说明
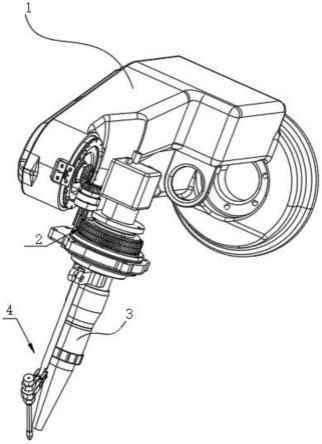
16.图1为本实用新型安装使用的立体示意图;
17.图2为图1中a处的局部放大图;
18.图3为图1中腕部内部结构的立体示意图。
19.其中:1、五轴机器人;2、腕部;3、激光焊枪;4、送丝机构;41、安装件;42、第一夹持件;43、延长件;44、调节块;45、第二夹持件;46、送丝杆;5、安装盘。
具体实施方式
20.为了使得本实用新型的技术方案的目的、技术方案和优点更加清楚,下文中将结合本实用新型具体实施例的附图,对本实用新型实施例的技术方案进行清楚、完整地描述。附图中相同的附图标记代表相同的部件;需要说明的是,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.下面结合附图,说明本实用新型的具体实施方式。
22.请参阅图1、图2和图3:
23.实施例1:本实施例提供一种五轴机器人激光焊接结构的实施方式,包括五轴机器人1,五轴机器人1末端具有腕部2,腕部2呈环状,穿设于腕部2设置有激光焊枪3;腕部2具有驱动件或具有与五轴机器人1第五轴传动连接的传动件以使得腕部2能够作旋转运动;换言之,能够通过在不具有第六轴旋转运动的第五轴设置伺服电机以及减速机使得其具有第六轴,也能够通过设置如蜗轮蜗杆等传动组件与小臂末端的驱动组件传动连接,从而获得第六轴;
24.腕部2朝向激光焊枪3工作端设置送丝机构4以使得送丝机构4在腕部2的驱动下能够围绕激光焊枪3做旋转运动。
25.送丝机构4包括固设于腕部2表面的安装件41,安装件41表面连接设置加长轴向距离的第一夹持件42,第一夹持件42的下方设置延长纵向距离的延长件43,延长件43的末端通过调节块44活动连接第二夹持件45,第二夹持件45具有通孔,通孔内固设送丝杆46。
26.送丝杆46呈倾斜设置且其出丝端与所述激光焊枪3的焊接端交集于一点。
27.安装件41为法兰盘,其固设在腕部2下方,用于送丝机构4的安装。
28.激光焊枪3与腕部2间通过设置于腕部2背面的安装盘5连接。
29.实施例2:
30.提供一种基于六轴机器人用于五轴机器人1激光焊接的结构;包括六轴机器人,六轴机器人的第六轴末端为腕部2,腕部2呈环状,穿设于腕部2设置有激光焊枪3;腕部2的朝向激光焊枪3工作端设置送丝机构4以使得送丝机构4在腕部2的旋转驱动下能够围绕激光焊枪3做旋转运动。
31.送丝机构4包括固设于腕部2表面的安装件41,安装件41为法兰盘,法兰盘的下表面连接设置加长轴向距离的第一夹持件42,第一夹持件42的下方设置延长纵向距离的延长件43,延长件43的末端通过调节块44活动连接第二夹持件45,第二夹持件45具有通孔,通孔内固设送丝杆46。
32.送丝杆46呈倾斜设置且其出丝端与激光焊枪3的焊接端交集于一点,从而能够在激光焊接工作中围绕激光焊枪3360度旋转送丝。
33.激光焊枪3与腕部2间通过设置于腕部2背面的安装盘5连接。
34.需要说明的是:上述实施例中第一夹持件42以及第二夹持件45均包括但不限于夹持块,延长件43包括但不限于延长杆。
35.本实用新型的工作原理:
36.以六轴机器人或加装第六轴的五轴机器人1为原型,其第六轴旋转执行端用于安装送丝机构4,其第五轴安装激光焊枪3,使得本实用新型的送丝机构4可围绕激光焊枪3360度旋转;配合控制中心的控制指令能够独立对送丝机构4的送丝角度和姿态进行调节,相比于现有技术的随动工作状态更为灵活;如此,能更快,更有效地变化送丝杆46角度进行送丝,使得在焊接一些角度过小的工件时无需在变换激光焊枪3的姿态就可以实现小角度处连续焊接的工艺要求,这样不仅提高产品合格率,也提高了工作效率。而且在空间狭隘的工件内焊接作业时,送丝杆46的多角度旋转送丝也能大幅度降低干涉风险,使得使用范围更广,使用效果更佳。
37.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1