一种用于拉铆螺栓的自动喂钉机构的制作方法
1.本技术涉及送料机构领域,特别涉及一种用于拉铆螺栓的自动喂钉机构。
背景技术:
2.汽车制造业不断高速发展,组成汽车的零部件也呈多样化复杂化趋势,好多零件自身需要焊接、铆接各种类型的标准件,以小的总成方式交付。
3.以前的拉铆工艺都是员工手持拉铆枪对零件进行拉铆作业。螺栓输送也是员工手动将拉铆螺栓从拉铆枪嘴处推入拉铆枪。手动操作带来的弊端是拉铆螺栓的手工喂钉需要员工的习熟度。螺栓和拉铆枪嘴在垂直的情况下才能被推进拉铆枪,这就会出现员工因习熟度不够导致需要反复送钉。导致螺钉损伤,无法使用。生产效率低下,产量不足。而且拉铆螺栓在被推进拉铆枪时枪会有一股正旋的辅助上钉的力,操作不当容易发生人员受伤的情况。
4.因此,亟需一种全自动的,可以满足将螺栓稳定、准确的输送进拉铆枪的自动送料机构。
技术实现要素:
5.该实用新型的目的是克服了上述现有技术中的缺点,提供一种全自动的,可以满足将螺栓稳定、准确的输送进拉铆枪的用于拉铆螺栓的自动喂钉机构。
6.为了实现上述的目的,该实用新型具有如下构成:
7.本实用新型为一种用于拉铆螺栓的自动喂钉机构,包括用于夹持螺钉的夹持组件以及与该夹持组件固定连接并带着所述夹持组件往复运动的推料组件;
8.所述的夹持组件包括气缸固定板以及设置于所述气缸固定板上并贯穿该气缸固定板的定位孔,所述的定位孔中内嵌有下方开口的螺柱定位环,该螺栓定位环可接住通过送料管输送的螺栓;所述的推料组件将所述的夹持组件移动至拉铆枪下方,并将所述的螺栓推入拉铆枪嘴。
9.在优选的用于拉铆螺栓的自动喂钉机构中,所述的推料组件包括横向推料装置以及竖向推料装置;
10.所述的横向推料装置包括滑台气缸以及滑台气缸底板,所述的滑台气缸设置于所述的气缸固定板以及滑台气缸底板之间;该滑台气缸与所述的气缸固定板固定连接,并与所述的滑台气缸底板在气缸往复运动方向可移动的连接;
11.所述的竖向推料装置与所述的滑台气缸底板固定连接,该竖向推料装置可将所述的横向推料装置及夹持组件在竖向往复移动。
12.在优选的用于拉铆螺栓的自动喂钉机构中,所述的夹持组件还包括固定于气缸固定板下方的手指气缸,以及与该手指气缸连接的,位于螺柱定位环下方的夹爪,该夹爪可夹住位于所述螺柱定位环中的螺栓。
13.在优选的用于拉铆螺栓的自动喂钉机构中,所述的夹爪包括左夹块以及右夹块,
该左夹块以及右夹块分别设置于所述螺柱定位环轴线两侧,并可在与所述的气缸固定板平行的方向往复移动;
14.所述的手指气缸带动该左夹块以及右夹块在朝向所述螺柱定位环中的螺栓互相靠近,并夹住所述的螺栓。
15.在优选的用于拉铆螺栓的自动喂钉机构中,所述的左夹块以及右夹块为分别设置有互相面对的v形槽的螺柱左v型块以及螺柱右v型块;
16.所述手指气缸带动所述螺柱左v型块以及螺柱右v型块朝向螺栓相互靠近,两个所述的v形槽组合成菱形夹爪用于夹住所述的螺栓。
17.在优选的用于拉铆螺栓的自动喂钉机构中,所述的夹爪上设置有朝向螺柱定位环的光纤感应器,用于检测该螺柱定位环内是否有螺栓。
18.在优选的用于拉铆螺栓的自动喂钉机构中,所述的螺柱定位环包括定位法兰盘以及与该定位法兰盘同轴并设置于下方的定位管,所述的螺栓的螺柱穿入所述的定位管中,所述定位法兰盘抵接该螺栓的螺栓法兰面。
19.采用了本实用新型的用于拉铆螺栓的自动喂钉机构,包括用于夹持螺钉的夹持组件以及与该夹持组件固定连接并带着所述夹持组件往复运动的推料组件;所述的夹持组件包括气缸固定板以及设置于所述气缸固定板上并贯穿该气缸固定板的定位孔,所述的定位孔中内嵌有下方开口的螺柱定位环,该螺栓定位环可接住通过送料管输送的螺栓;所述的推料组件将所述的夹持组件移动至拉铆枪下方,并将所述的螺栓推入拉铆枪嘴。采用本实用新型的自动喂钉机构可以将从螺母机推出的螺钉准确无误的推进拉铆枪嘴内,省去了人工送钉带来的不便,提高了螺栓作业的生产效率,实现了自动化生产。
附图说明
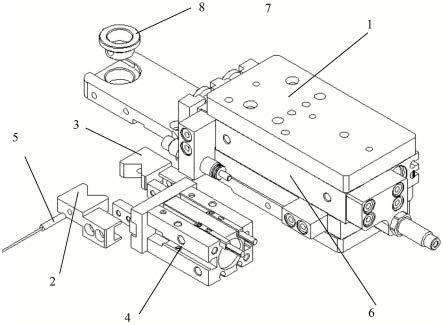
20.图1为本实用新型的优选的自动喂钉机构的结构示意图;
21.图2为本实用新型的优选的自动喂钉机构的实际使用示意图;
22.符号说明:滑台气缸底板1、螺柱左v型块2、螺柱右v型块3、手指气缸4、光纤感应器5、滑台气缸6、气缸固定板7、螺柱定位环8、竖向推料装置9。
具体实施方式
23.下面将结合附图对本公开实施例中的技术方案进行清楚、完整地描述,显而易见地,所描述的实施例仅仅是本实用新型的部分实施例,而不是全部的实施例。基于本公开实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,也属于本实用新型保护的范围。
24.受自动化生产趋势影响,现在的拉铆工艺都需要使用自动化设备进行生产。其中的拉铆螺栓的喂钉工艺也需要一种自动化的生产方式,在实现自动化的情况下,需要解决如何能稳定的准确的将螺栓喂进拉铆枪的问题。本实用新型提供一种用于拉铆螺栓的自送喂钉机构。
25.如图1及图2所示,本实用新型为一种用于拉铆螺栓的自动喂钉机构,包括用于夹持螺钉的夹持组件以及与该夹持组件固定连接并带着所述夹持组件往复运动的推料组件;
26.所述的夹持组件包括气缸固定板7以及设置于所述气缸固定板7上并贯穿该气缸
固定板7的定位孔,所述的定位孔中内嵌有下方开口的螺柱定位环8,该螺栓定位环可接住通过送料管输送的螺栓;所述的推料组件将所述的夹持组件移动至拉铆枪下方,并将所述的螺栓推入拉铆枪嘴。
27.本实用新型的与自动送钉机构配合使用(图中未示出),所述的定位孔上方设置有自动送钉机构的送料管,自动送钉机构将螺栓整理后从送料管输送至螺柱定位环8中,本实用新型的自动喂钉机构完成螺栓的装载,随后通过推料组件在竖向及横向移动,将所述的螺栓运送至拉铆枪嘴的下方,向上移动装配入拉铆枪嘴中。
28.优选地,本实用新型应用于拉铆螺栓,拉铆螺栓与普通螺栓的区别包括拉铆螺栓的螺柱部分不设置有螺纹,这使得拉铆螺栓在通过送料管掉入螺柱定位环8中时,不会因为螺纹造成螺栓卡于螺柱定位环8掉落的路程中。因此,本实用新型优选的为适用于拉铆螺栓的喂钉作业。
29.本实用新型的自动喂钉机构可以将从螺母机推出的螺钉准确无误的推进拉铆枪嘴内。省去了人工送钉带来的不便。提高了拉铆螺栓的生产效率,实现了自动化生产。
30.在优选的实施例中,所述的推料组件包括横向推料装置以及竖向推料装置9;所述横向推料装置与气缸固定板7连接,可以使气缸固定板7及其上的螺栓在横向往复运动。所述的竖向推料装置9与所述的横向推料装置固定,可以使横向推料装置及与其固定的气缸固定板7在竖向上往复运动。由此完成了本实用新型的自动喂钉机构的四向运动,可以将装载的螺栓运送至拉铆枪嘴中。
31.在优选的实施例中,所述的横向推料装置包括滑台气缸6以及滑台气缸底板1,所述的滑台气缸6设置于所述的气缸固定板7以及滑台气缸底板1之间;该滑台气缸6与所述的气缸固定板7固定连接,并与所述的滑台气缸底板1在气缸往复运动方向可移动的连接。所述的滑台气缸6可以带动气缸固定板7及其上的螺栓在气缸往复运动,所述的滑台气缸底板1仍处于原位,不随滑台气缸6的作业所移动位置。
32.所述的竖向推料装置9与所述的滑台气缸底板1固定连接,该竖向推料装置9可将所述的横向推料装置及夹持组件在竖向往复移动。该竖向推料装置9可将向推料装置、夹持组件以及其上装载的螺栓整体在竖向进行往复运动。
33.在其他优选的实施例中,所述的气缸安装板也可与竖向推料装置9固定连接,通过竖向装置实现夹持组件在竖向的往复运动,随后该竖向推料装置9与横向推料装置在固定连接,是横向推料装置可以带动竖向推料装置9、夹持组件以及其上的螺栓在横向往复移动。
34.在优选的实施例中,还包括进一步固定、正位螺柱定位环8中螺栓的技术方案,具体包括,所述的夹持组件还包括固定于气缸固定板7下方的手指气缸4,以及与该手指气缸4连接的,位于螺柱定位环8下方的夹爪,该夹爪可夹住位于所述螺柱定位环8中的螺栓。通过使用夹爪夹住自螺柱定位环8下伸出的螺柱,该夹爪在抓紧螺栓时可以保证螺栓永远垂直,这会在喂钉时一次成功,无需反复喂钉。
35.在优选的实施例中,所述的夹爪包括左夹块以及右夹块,该左夹块以及右夹块分别设置于所述螺柱定位环8轴线两侧,并可在与所述的气缸固定板7平行的方向往复移动;所述的手指气缸4带动该左夹块以及右夹块在朝向所述螺柱定位环8中的螺栓互相靠近,并夹住所述的螺栓。
36.所述的左夹块以及右夹块设置于可以接触到螺柱定位环8下伸出的螺柱的平面上,并可分别朝向该螺柱移动。
37.在优选的实施例中,所述的左夹块以及右夹块为分别设置有互相面对的v形槽的螺柱左v型块3以及螺柱右v型块2;所述手指气缸4带动所述螺柱左v型块3以及螺柱右v型块2朝向螺栓相互靠近,两个所述的v形槽组合成菱形夹爪用于夹住所述的螺栓。
38.如图1所示,图中显示了螺柱左v型块3以及螺柱右v型块2的结构示意图,所述的螺柱左v型块3以及螺柱右v型块2为矩形块,其相邻的面上设置有v形的贯穿该矩形块的开槽,该两块v型块合并时,该开槽组合为菱形的具有一定厚度的夹爪。
39.优选地,该夹爪开槽的竖向面为垂直于地面,当夹爪夹住螺栓时,该菱形夹爪与所述的螺柱为线接触,通过四条线接触将所述的螺栓保持直立状态。能够是螺栓适配的装于朝向为垂直向下的拉铆枪嘴中。
40.在优选的实施例中,所述的夹爪上设置有光纤感应器5,用于检测该螺柱定位环8内是否有螺栓。当螺栓落入螺柱定位环8中时,所述的光纤传感器感知到螺栓,上述的手指气缸4开始工作,用夹爪夹住该螺栓的螺柱。
41.优先地,所述的光纤感应器5设置于螺柱左v型块3或螺柱右v型块2的开槽的弯折处,检测方向朝向螺栓。
42.在优选的实施例中,所述的螺柱定位环8包括定位法兰盘以及与该定位法兰盘同轴并设置于下方的定位管,所述的螺栓的螺柱穿入所述的定位管中,所述定位法兰盘抵接该螺栓的螺栓法兰面。
43.与该螺柱定位环8配合的为气缸固定板7上的定位孔,所述的定位孔包括与该定位管外径相同的定位穿孔,以及与该定位法兰盘外径配合的承载台用于抵接所述的螺柱定位环8。
44.在其他优选的实施例中,可以更换螺柱定位环8或者调整定位孔的大小更换所要喂钉的螺栓。
45.在本实用新型的自动喂钉机构实际使用时,夹持组件的螺柱左v型块、螺柱右v型块在手指气缸的带动下向两侧运动,空出螺栓位置。由螺栓定位环接住从螺母机内推出的螺栓,螺栓定位环表面撑住螺栓法兰面使其不会下落且确定位置。螺栓顺着螺栓定位环进入一开始螺柱左v型块、螺柱右v型块空出的螺栓位置。
46.这时光纤感应器在感应到螺钉时,意味着的螺栓送钉到位。手指气缸带动螺柱左v型块、螺柱右v型块向内运动,夹紧螺栓。推料组件在收到夹紧到位信号后,竖向推料装置的气缸运动向下推出,避出送料机构和拉铆枪的位置。再由滑台气缸向前推动,使螺栓在拉铆枪嘴正下方。这时竖向推料装置气缸向上运动,将螺栓向拉铆枪嘴内推,待拉铆枪嘴平面与螺栓法兰面贴紧,表示喂钉到位。
47.随后手指气缸带动螺柱左v型块、螺柱右v型块向外。松开螺栓,竖向推料装置的气缸向下运动,避开干涉区,滑台气缸启动缩回。气缸向上回初始位。整个喂钉流程结束。
48.当后期若需要更换规格(大小、长短)不一的螺栓时,只需更换相对应的螺栓定位环和调整气缸、滑台气缸的行程位置即可完成螺栓的切换。简单又便捷。
49.如本技术和权利要求书中所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。“第一”、“第二”并非限定词,只是为了解
释,便于理解该实用新型的技术方案,“第一”、“第二”涉及的内容可互相替换。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。
50.除非另外具体说明,否则在这些实施例中阐述的部件、相对布置、功能、数值并不限制本实用新型的范围。同时,显而易见的,为了便于叙述,附图中所示的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备暂不做详细描述,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出的和讨论的所有示例中,任何具体值应被解释为仅仅是实例性的,而不是作为限制。因此,步骤性实施例的其他示例可以具有不同的先后顺序。
51.上面是对本实用新型的说明,而不应被认为是对其的限制。尽管描述了本实用新型的若干示例性实施例,但本领域技术人员将容易地理解,在不背离本实用新型的技术特征的前提下可以对示例性实施例进行许多修改。因此,所有这些修改都意图包含在权利要求书所限定的本实用新型范围内。应当理解,上面是对本实用新型的说明,而不应被认为是限于所公开的特定实施例,并且对所公开的实施例以及其他实施例的修改意图包含在所附权利要求书的范围内。本实用新型由权利要求书及其等效物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1