一种激光焊接机器人
本发明涉及激光焊接,更具体地说,本发明涉及一种激光焊接机器人。
背景技术:
1、激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法,激光焊接属非接触式焊接,作业过程不需加压,焊接过程属热传导型,激光辐射加热工件表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、峰值功率和重复频率等参数,使工件熔化,形成特定的熔池。
2、如图8和图9所示的工件,工件一100、工件二200和工件三300,工件一100右侧的高度和工件二200左侧的高度相等,工件二200右侧的高度和工件三300左侧的高度相等,由于焊接位置工件的厚度不一,如果工件一100和工件二200的接缝处太薄,则焊接时可能会破坏工件,故而在两次焊接时,需要改变激光焊枪的功率密度,目前对于这种工件的焊接来说,通过是人工焊接一次后,去改变输入电流,然后再去焊接下一条焊缝,循环往复,耗费时间。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种激光焊接机器人,能够在焊接的过程中,自行改变焊枪的功率密度,实现自动化焊接操作。
2、为实现上述目的,本发明提供如下技术方案:
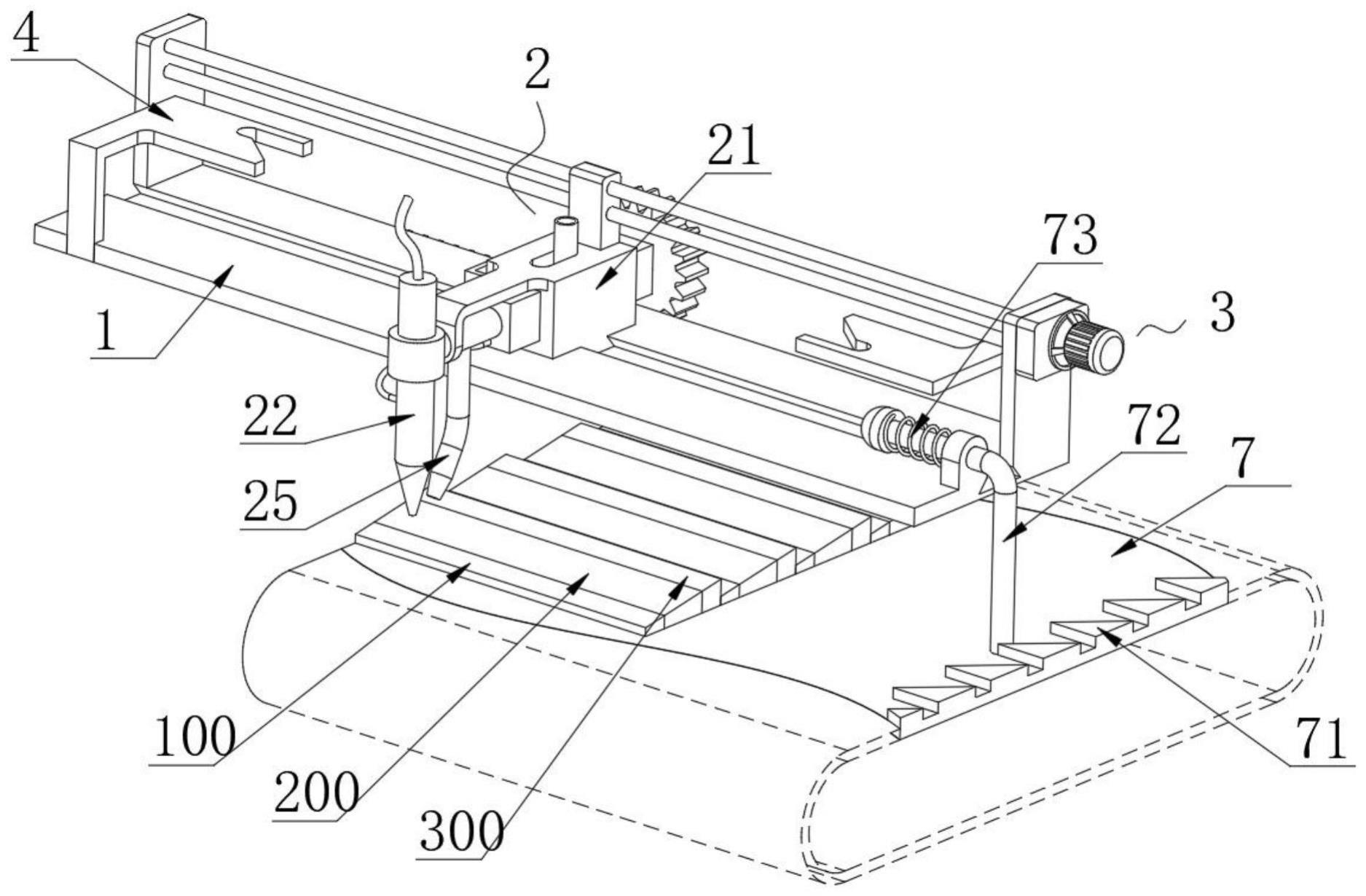
3、一种激光焊接机器人,包括固定架、设置在固定架上的移动装置以及用于驱动移动装置在固定架上往复移动的驱动装置,移动装置包括与固定架滑动连接的移动架、设置在移动架前侧的激光焊枪、设置在移动架内部并可沿着与移动装置移动方向垂直的方向移动的移动杆,设置在移动杆内部并与移动架固定连接的固定杆,固定杆靠近激光焊枪的一侧固定连接有出气头,移动杆的一端转动连接有旋转部件;
4、移动装置向一侧移动时:激光焊枪对工件进行焊接,而后移动杆移动,使出气头可吹出冷却气体;
5、移动装置向另一侧移动时:通过出气头对焊缝吹气冷却,而后旋转部件转动,切换激光焊枪的功率密度,而后移动杆回移切断出气头的冷却气体。
6、优选的,固定架的两端均设置有导向板,导向板的一端开设有槽口,槽口的一侧具有斜面,一个导向板上的槽口和斜面分别与另一个导向板上的斜面和槽口面对面设置,移动杆的上表面固定连接有延伸至移动架上方的驱动柱,移动装置移动时,驱动柱与斜面接触从而带动移动杆移动。
7、优选的,驱动柱为中空结构,固定杆的内部设置有通道,出气头与通道的底端相连通,移动杆移动时驱动柱可与通道的上端接通或断开。
8、优选的,旋转部件为圆柱齿轮,其中一个导向板的一侧设置有可与旋转部件啮合的齿条,旋转部件从齿条的一端移动到另一端时,旋转部件旋转180°,以切换激光焊枪的功率密度。
9、优选的,旋转部件内部的两侧均开设有内腔,内腔的内部通过弹簧一连接有导电块,移动杆外侧壁的两侧均开设有弧形凹槽一,导电块可被弹簧一压入弧形凹槽一内,移动杆的内部设置有不接通的导电线一和导电线二,导电线一延伸至其中一个弧形凹槽一内并可与导电块电连接,导电线二与激光焊枪电连接,导电线一和导电线二不接通的位置处设置有导电线三,当移动杆移动时,导电线一和导电线二断开或通过导电线三接通。
10、优选的,还包括定位机构,定位机构包括插接在移动架侧壁内的定位帽以及设置在定位帽端部的弹簧二,移动杆的一侧开设有两个弧形凹槽二,移动杆移动后,弹簧二可将定位帽压入弧形凹槽二内。
11、优选的,固定架的下方设置有用于输送工件的输送带。
12、优选的,输送带边缘处的周向设置有多个楔形块、固定架的一端活动插接有推杆,推杆通过弹簧三与固定架弹性连接,移动装置移动时,可推动推杆移动,以使推杆推动楔形块的斜面,最终使输送带间歇向前输送。
13、本发明的技术效果和优点:
14、1、通过移动装置和导向板的设置,可以实现自动化焊接操作,并且还能够控制激光焊枪的功率密度,以及冷却气体的通断,从而能够节省人力,节省频繁操作改变电流带来的时间以及减少危险。
15、2、在移动杆往复移动的过程中,一方面可以控制驱动柱和通道的通断,在焊接时不通冷却气体,在焊接后通冷却气体冷却降温以防止氧化,另一方面可以控制激光焊枪电流导电线一和导电线二的通断,以控制激光焊枪的工作。
16、3、在旋转部件转动的过程中,可以切换与导电线一电连接的导电块,通过导电块接触入不同的电流,实现控制激光焊枪功率密度的效果,导电块还可以起到对旋转部件的定位作用。
技术特征:
1.一种激光焊接机器人,包括固定架(1)、设置在固定架(1)上的移动装置(2)以及用于驱动移动装置(2)在固定架(1)上往复移动的驱动装置(3),其特征在于:所述移动装置(2)包括与固定架(1)滑动连接的移动架(21)、设置在移动架(21)前侧的激光焊枪(22)、设置在移动架(21)内部并可沿着与移动装置(2)移动方向垂直的方向移动的移动杆(23),设置在移动杆(23)内部并与移动架(21)固定连接的固定杆(24),所述固定杆(24)靠近激光焊枪(22)的一侧固定连接有出气头(25),所述移动杆(23)的一端转动连接有旋转部件(26)。
2.根据权利要求1所述的一种激光焊接机器人,其特征在于:所述固定架(1)的两端均设置有导向板(4),所述导向板(4)的一端开设有槽口(41),槽口(41)的一侧具有斜面(42),一个导向板(4)上的槽口(41)和斜面(42)分别与另一个导向板(4)上的斜面(42)和槽口(41)面对面设置,所述移动杆(23)的上表面固定连接有延伸至移动架(21)上方的驱动柱(231),所述移动装置(2)移动时,驱动柱(231)与斜面(42)接触从而带动移动杆(23)移动。
3.根据权利要求2所述的一种激光焊接机器人,其特征在于:所述驱动柱(231)为中空结构,所述固定杆(24)的内部设置有通道(241),所述出气头(25)与通道(241)的底端相连通,所述移动杆(23)移动时驱动柱(231)可与通道(241)的上端接通或断开。
4.根据权利要求2所述的一种激光焊接机器人,其特征在于:所述旋转部件(26)为圆柱齿轮,其中一个所述导向板(4)的一侧设置有可与旋转部件(26)啮合的齿条(5),所述旋转部件(26)从齿条(5)的一端移动到另一端时,旋转部件(26)旋转180°,以切换激光焊枪(22)的功率密度。
5.根据权利要求4所述的一种激光焊接机器人,其特征在于:所述旋转部件(26)内部的两侧均开设有内腔(261),所述内腔(261)的内部通过弹簧一(263)连接有导电块(262),所述移动杆(23)外侧壁的两侧均开设有弧形凹槽一(232),所述导电块(262)可被弹簧一(263)压入弧形凹槽一(232)内,所述移动杆(23)的内部设置有不接通的导电线一(264)和导电线二(265),导电线一(264)延伸至其中一个弧形凹槽一(232)内并可与导电块(262)电连接,导电线二(265)与激光焊枪(22)电连接,导电线一(264)和导电线二(265)不接通的位置处设置有导电线三(266),当移动杆(23)移动时,导电线一(264)和导电线二(265)断开或通过导电线三(266)接通。
6.根据权利要求1所述的一种激光焊接机器人,其特征在于:还包括定位机构(6),所述定位机构(6)包括插接在移动架(21)侧壁内的定位帽(61)以及设置在定位帽(61)端部的弹簧二(63),所述移动杆(23)的一侧开设有两个弧形凹槽二(62),所述移动杆(23)移动后,弹簧二(63)可将定位帽(61)压入弧形凹槽二(62)内。
7.根据权利要求1所述的一种激光焊接机器人,其特征在于:所述固定架(1)的下方设置有用于输送工件的输送带(7)。
8.根据权利要求7所述的一种激光焊接机器人,其特征在于:所述输送带(7)边缘处的周向设置有多个楔形块(71)、固定架(1)的一端活动插接有推杆(72),所述推杆(72)通过弹簧三(73)与固定架(1)弹性连接,所述移动装置(2)移动时,可推动推杆(72)移动,以使推杆(72)推动楔形块(71)的斜面,最终使输送带(7)间歇向前输送。
技术总结
本发明公开了一种激光焊接机器人,具体涉及激光焊接技术领域,包括固定架、设置在固定架上的移动装置以及用于驱动移动装置在固定架上往复移动的驱动装置,移动装置包括与固定架滑动连接的移动架、设置在移动架前侧的激光焊枪、设置在移动架内部并可沿着与移动装置移动方向垂直的方向移动的移动杆,设置在移动杆内部并与移动架固定连接的固定杆,固定杆靠近激光焊枪的一侧固定连接有出气头,移动杆的一端转动连接有旋转部件。本发明通过移动装置和导向板的设置,可以实现自动化焊接操作,并且还能够控制激光焊枪的功率密度,以及冷却气体的通断,从而能够节省人力,节省频繁操作改变电流带来的时间以及减少危险。
技术研发人员:黄瑞,张敬修,丁晓贵
受保护的技术使用者:安庆师范大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!