一种汽车零部件自动焊接机器人
本发明涉及焊接,更具体地说,本发明涉及一种汽车零部件自动焊接机器人。
背景技术:
1、新能源汽车采用非常规的车用燃料作为动力来源,具有噪声小、零排放或排往往低的特点,在当前能源问题的大环境下,实现汽车动力系统的新能源化,推动传统汽车产业的战略转型,已经成为全球汽车工业共同面对的挑战。我国在新能源汽车的自主研发过程中,坚持以核心技术、系统集成和关键零部件为重点的原则,确立了以纯电动汽车、混合电动汽车、燃料电池汽车为“三纵”,以电动机驱动系统、整车控制系统、动力蓄电池/燃料电池为“三横”的研发布局。
2、汽车总体构造一般由发动机、底盘、车身及其附件、电气设备等四部分组成,如图7所示,工件一200为一根长的支撑管件,工件二300为焊接的支架,用于连接其他部件,目前对该零部件的焊接采用人工方式或使用多轴机器人,这种机器人价格昂贵,速度也不够快。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种汽车零部件自动焊接机器人。
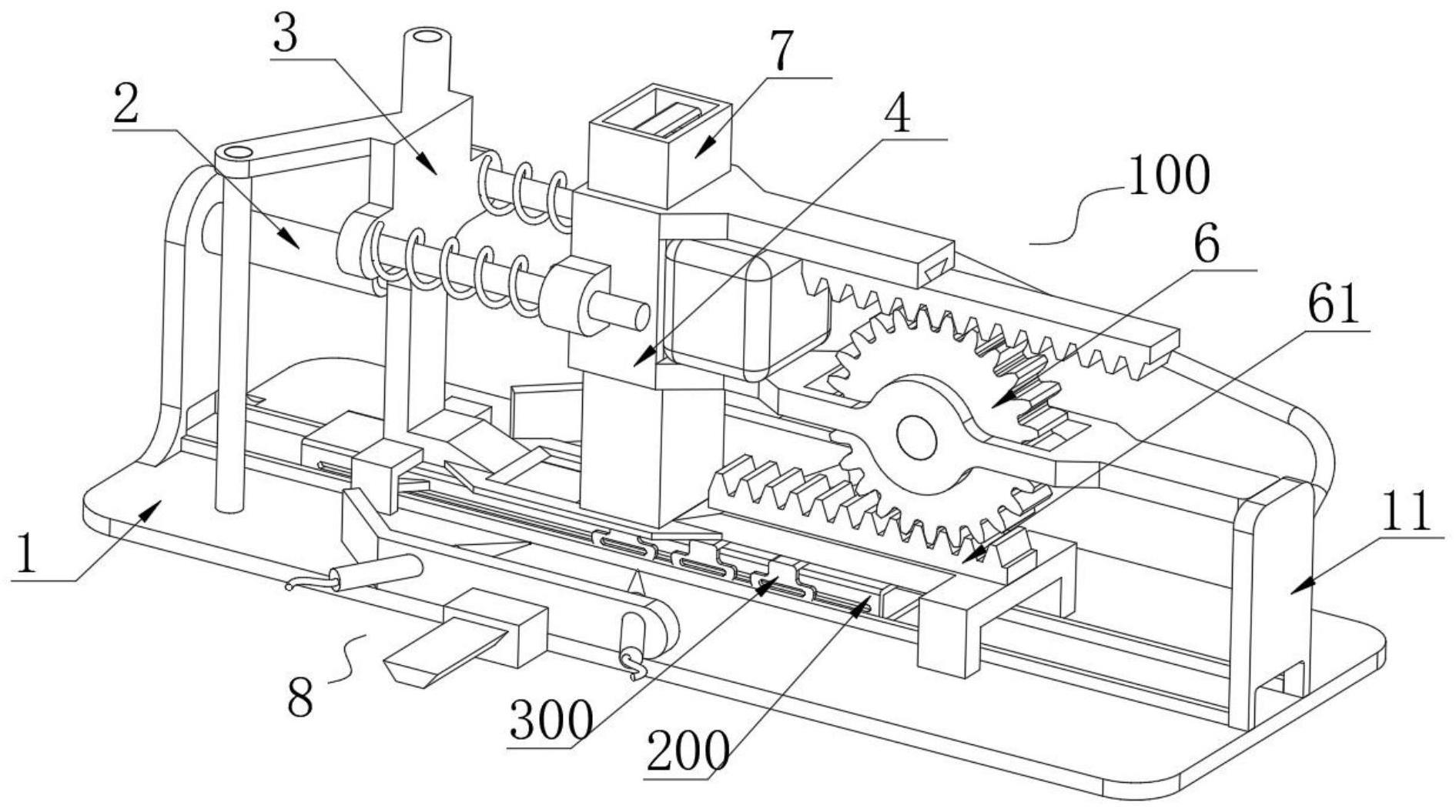
2、一种汽车零部件自动焊接机器人,包括机架和动力部件,机架的前端固定安装有挡板,机架上滑动安装有移动架一,移动架一的底部开设有落料口,移动架一的上侧设置有移动架二,移动架二通过弹性伸缩组件与移动架一相连接,移动架二上转动连接有齿轮,移动架一的上表面固定安装有与齿轮相啮合的齿条一,移动架二上固定安装有竖向设置有置料筒,移动架一的两侧均设置有焊接组件,移动架一的底部设置有输送部件;
3、动力部件推动移动架一向挡板的方向移动时,输送部件可输送放置在移动架一下方的工件一,当移动架二的前端与挡板接触后,移动架一继续移动,从而使置料筒与落料口重合,位于置料筒内部的工件二落至工件一上,而后焊接组件对工件一和工件二进行焊接。
4、优选的,焊接组件包括弹性复位件一与机架通滑动连接的移动板,且移动板可移动的方向与移动架一移动的方向垂直,移动板上固定安装有焊枪,移动板的端部具有斜面,移动架一上固定连接有推杆,推杆可通过推动斜面使移动板向移动架一的方向移动。
5、优选的,焊枪设置有两个且分别位于移动板的两端,两个焊枪呈“八”字形布置且相互靠近的一端朝向移动架一。
6、优选的,移动架一位于落料口位置处为一薄板,置料筒的底部与薄板的上表面接触。
7、优选的,输送部件为分别设置在移动架一底部两侧的斜爪,斜爪通过弹性复位件二与移动架一转动连接,移动架一向挡板的方向移动时,两个斜爪夹住工件一进行输送。
8、优选的,输送部件为分别设置在移动架一底部两侧的电磁铁。
9、优选的,弹性伸缩组件包括与移动架一固定安装的导向杆以及套设在导向杆上的弹簧,导向杆的一端活动插接在移动架二上,使移动架二可沿着移动架一移动的方向移动。
10、优选的,还包括喷漆组件,喷漆组件包括设置在齿轮上方并与齿轮相啮合的齿条二,齿条二与移动架二滑动连接,弹性囊的进口和出口均设置有单向阀,出口位置安装喷管,喷管延伸至机架前端的位置。
11、本发明的技术效果和优点:
12、1.在移动架一和移动架二一起移动的过程中,可以实现工件一的输送目的,在移动架二停止,移动架一继续移动时,可以实现对工件二的落料以及焊接的目的,返回时输送部件不进行输送,集间歇送料与焊接与一体,焊接速度快,自动化程度高,结构简单,成本低。
13、2.通过移动架二停止移动而移动架一仍然移动的过程,可以利用齿条一带动齿轮转动,进而使齿条二移动实现挤压喷漆防止焊接点锈蚀的目的,通过移动架一的移动可以带动焊接组件向着焊接位置移动从而实现在工件下落后的焊接目的。
技术特征:
1.一种汽车零部件自动焊接机器人,包括机架(1)和动力部件(2),其特征在于:所述机架(1)的前端固定安装有挡板(11),所述机架(1)上滑动安装有移动架一(3),所述移动架一(3)的底部开设有落料口(31),所述移动架一(3)的上侧设置有移动架二(4),所述移动架二(4)通过弹性伸缩组件(5)与移动架一(3)相连接,所述移动架二(4)上转动连接有齿轮(6),所述移动架一(3)的上表面固定安装有与齿轮(6)相啮合的齿条一(61),所述移动架二(4)上固定安装有竖向设置有置料筒(7),所述移动架一(3)的两侧均设置有焊接组件(8),所述移动架一(3)的底部设置有输送部件;
2.根据权利要求1所述的一种汽车零部件自动焊接机器人,其特征在于:所述焊接组件(8)包括通过弹性复位件一与机架(1)滑动连接的移动板(81),且所述移动板(81)可移动的方向与移动架一(3)移动的方向垂直,所述移动板(81)上固定安装有焊枪(82),所述移动板(81)的端部具有斜面(83),所述移动架一(3)上固定连接有推杆(84),所述推杆(84)可通过推动斜面(83)使移动板(81)向移动架一(3)的方向移动。
3.根据权利要求2所述的一种汽车零部件自动焊接机器人,其特征在于:所述焊枪(82)设置有两个且分别位于移动板(81)的两端,两个焊枪(82)呈“八”字形布置且相互靠近的一端朝向移动架一(3)。
4.根据权利要求1所述的一种汽车零部件自动焊接机器人,其特征在于:所述移动架一(3)位于落料口(31)位置处为一薄板,所述置料筒(7)的底部与薄板的上表面接触。
5.根据权利要求1-3任一项所述的一种汽车零部件自动焊接机器人,其特征在于:所述输送部件为分别设置在移动架一(3)底部两侧的斜爪(9),所述斜爪(9)通过弹性复位件二与移动架一(3)转动连接,所述移动架一(3)向挡板(11)的方向移动时,两个斜爪(9)夹住工件一(200)进行输送。
6.根据权利要求1-3任一项所述的一种汽车零部件自动焊接机器人,其特征在于:所述输送部件为分别设置在移动架一(3)底部两侧的电磁铁。
7.根据权利要求1所述的一种汽车零部件自动焊接机器人,其特征在于:所述弹性伸缩组件(5)包括与移动架一(3)固定安装的导向杆(51)以及套设在导向杆(51)上的弹簧(52),所述导向杆(51)的一端活动插接在移动架二(4)上,使移动架二(4)可沿着移动架一(3)移动的方向移动。
8.根据权利要求1所述的一种汽车零部件自动焊接机器人,其特征在于:还包括喷漆组件(100),所述喷漆组件(100)包括设置在齿轮(6)上方并与齿轮(6)相啮合的齿条二(101),所述齿条二(101)与移动架二(4)滑动连接,所述弹性囊(102)的进口和出口均设置有单向阀,出口位置安装喷管(103),所述喷管(103)延伸至机架(1)前端的位置。
技术总结
本发明公开了一种汽车零部件自动焊接机器人,具体涉及焊接技术领域,包括机架和动力部件,机架的前端固定安装有挡板,机架上滑动安装有移动架一,移动架一的底部开设有落料口,移动架一的上侧设置有移动架二,移动架二通过弹性伸缩组件与移动架一相连接,移动架二上转动连接有齿轮,移动架一的上表面固定安装有与齿轮相啮合的齿条一,移动架二上固定安装有竖向设置有置料筒,移动架一的两侧均设置有焊接组件,移动架一的底部设置有输送部件。本发明在移动架一和移动架二一起移动的过程中,可以实现工件一的输送目的,在移动架二停止,移动架一继续移动时,可以实现对工件二的落料以及焊接的目的,返回时输送部件不进行输送。
技术研发人员:黄瑞,张敬修,仇多洋
受保护的技术使用者:合肥学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!