快速云计算智能定位方法、系统及装置与流程
本发明涉及cnc设备的定位,特别是涉及一种快速云计算智能定位方法、系统及装置。
背景技术:
1、随着制造产业的升级,机械加工行业对自动化的需求越来越高,特别是cnc产线上,以机械手代替人工进行产品的取料、放料等已成为趋势。在机械手取料、放料过程中涉及对目标产品的定位问题,现阶段机械手实现目标产品的定位主要通过人工先对机械手在空间坐标系中的坐标进行粗调,得到粗调坐标值后再针对具体的产品形状及位置对机械手的坐标及运行轨迹进行差异化调试。
2、但目前采用人工调试的方式至少具有以下弊端:其一,人工调试利用厂家自带的操控面板,调试时人为移动产品,记录机械手的坐标,调试过程耗时耗力,生产效率低下,其二,cnc设备加工的产品品种多样,生产周期短,每更换一个加工的产品品类,对于新加工的首件产品需要重新对机械手的坐标进行调试,进一步降低了生产效率;其三,在机械手的运行过程中,无法进行自适应调节,使得出现产品位置变化时,将导致机械手取料、放料时无法准确对位,造成取、放料不到位,进而造成产品报废等,虽然在产品上加装感应器能够解决取、放料不到位时的报警问题,一定程度上降低产品的报废率,但此方法仍是以产品报废为前提进行的报警,且在报警后需人为解除后方可继续进行后续加工,同样降低了生产效率。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种快速云计算智能定位方法、系统及装置,以解决现有技术中机械手坐标调试效率低以及运行过程中无法自适应调节对位的问题。
2、为解决上述技术问题,本发明的一个技术方案提供一种快速云计算智能定位方法,用于定位并修正cnc设备的机械手的运行轨迹,包括以下步骤:
3、确定坐标原点并构建三维空间坐标系;
4、采集待加工产品在所述三维空间坐标系中的实体位置及理论位置;
5、基于待加工产品的实体位置及理论位置计算待加工产品的位置坐标及偏移角度,根据所述位置坐标及偏移角度对所述机械手进行定位并于运行过程对机械手的运行轨迹进行修正。
6、进一步的,在所述确定坐标原点并构建三维空间坐标系的步骤中,具体方法为:
7、分别获取一预设位置至空间中x轴方向上的第一位置的x轴距离、y轴方向上的第二位置的y轴距离以及z轴方向上的第三位置的z轴距离,并根据所述x轴距离、y轴距离和z轴距离确定坐标原点,并根据所述坐标原点及x轴、y轴和z轴构建三维空间坐标系。
8、进一步的,在所述采集待加工产品在所述三维空间坐标系中的实体位置并获取对应的理论位置的步骤中,具体方法为:
9、获取待加工产品位于上料位时的实体图像及理论图像,分别提取所述实体图像及理论图像的实体特征曲线和理论特征曲线并以所述实体特征曲线和理论特征曲线限定对应的实体特征平面和理论特征平面得到所述待加工产品在三维空间坐标系中实体位置和理论位置。
10、进一步的,在所述基于待加工产品的实体位置及理论位置计算待加工产品的位置坐标及偏移角度,根据所述位置坐标及偏移角度对所述机械手进行定位并于运行过程对机械手的运行轨迹进行修正的步骤中,对机械手的运行轨迹进行修正的具体方法为:
11、判断是否需要对机械手的运行轨迹进行修正,若是,则于所述实体特征曲线上确定至少两个第一位置点以及于所述理论特征曲线上确定至少两个第二位置点,否则退出修正程序,其中,所述至少两个第一位置点中任意两点的连线经过所述实体特征平面的中心,所述至少两个第二位置点中任意两点的连线经过所述理论特征平面的中心
12、分别获取所述第一位置点及第二位置点在所述三维空间坐标系中的坐标,并根据所述第一位置点和第二位置点的坐标分别计算待加工产品在实体特征平面的实体中心坐标及在理论特征平面的理论中心坐标;
13、根据所述实体中心坐标及理论中心坐标计算机械手在三维空间坐标系中的偏移角度;
14、基于所述实体中心坐标、理论中心坐标及偏移角度对所述机械手的运行轨迹进行修正。
15、进一步的,在所述判断是否需要对机械手的运行轨迹进行修正的步骤中,具体方法为:
16、在所述实体特征平面确定至少三个第一特征点以及在所述理论特征平面上确定与所述第一特征点一一对应的第二特征点,分别获取所述第一特征点及第二特征点在三维空间坐标系中的坐标,将所述第一特征点的坐标一一与所述第二特征点的坐标进行匹配,若均匹配成功,则无需修正,否则需要修正。
17、进一步的,在所述根据所述实体中心坐标及理论中心坐标计算机械手在三维空间坐标系中的偏移角度的步骤中,所述偏移角度根据以下公式计算得到:
18、θx=arctan(e/f);
19、θy=arctan(f/e);
20、θz=arctan(a/b);
21、其中:θx,θy,θz分别为实体中心坐标与理论中心坐标在x轴、y轴及z轴方向上的偏移角度,a,e,f分别为实体中心坐标与理论中心坐标在x轴、y轴及z轴上的距离,b为实体中心在所述理论特征平面上的投影位置与所述理论中心的距离。
22、为解决上述技术问题,本发明的另一技术方案提供一种快速云计算智能定位系统,用于定位并修正cnc设备的机械手的运行轨迹,包括:
23、坐标构建模块,用于确定坐标原点并构建三维空间坐标系;
24、位置采集模块,用于采集待加工产品在所述三维空间坐标系中的实体位置及理论位置;以及
25、轨迹修正模块,用于根据待加工产品的实体位置及理论位置计算待加工产品的位置坐标及偏移角度,根据所述位置坐标及偏移角度对所述机械手进行定位并于运行过程对机械手的运行轨迹进行修正。
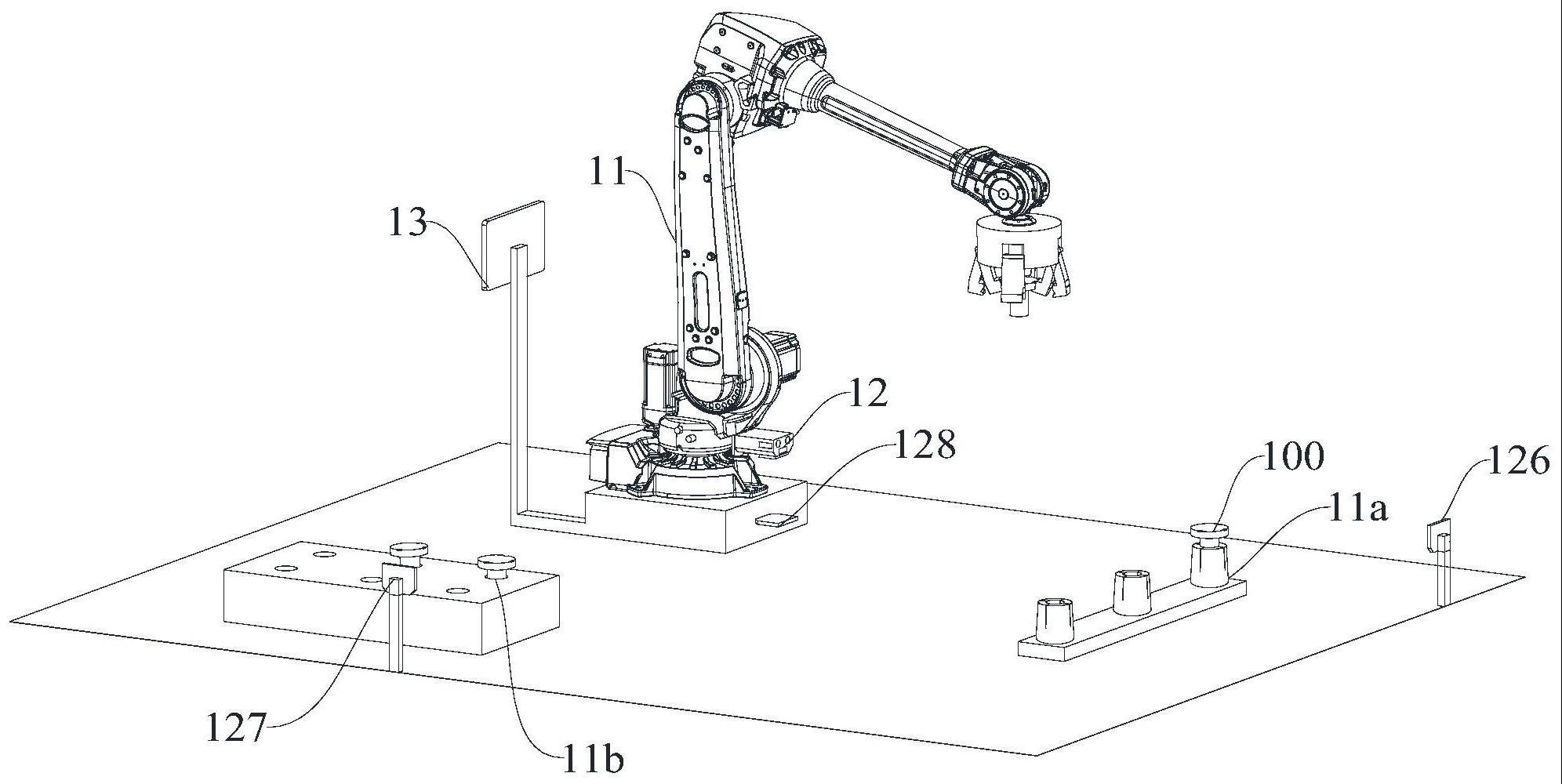
26、为解决上述技术问题,本发明的又一技术方案提供一种快速云计算智能定位装置,包括:
27、机械手,具有形成于所述机械手的上料区域的上料位及下料区域的下料位,所述机械手用于对所述上料位上待加工产品进行取料以及将加工完成的产品转移至下料位进行放料;以及
28、自适应定位系统,用于对所述机械手在取料和放料时的运行轨迹进行自适应修正。
29、进一步的,所述自适应定位系统包括:
30、采集机构,用于采集上料位和/或下料位的产品的图像及采集机构上一预设位置至空间中x轴方向上的第一位置的x轴距离、y轴方向上的第二位置的y轴距离以及z轴方向上的第三位置的z轴距离;以及
31、处理器,用于根据所述x轴距离、y轴距离和z轴距离确定坐标原点并构建三维空间坐标系,以及根据待加工产品在三维空间坐标系中的实体位置及理论位置计算待加工产品的位置坐标及偏移角度,并根据所述位置坐标及偏移角度对所述机械手的运行轨迹进行修正。
32、进一步的,所述采集机构包括一固置于所述机械手上的安装座以及集成于所述安装座上信号采集模组和图像采集模组;所述信号采集模组包括设置于所述安装座上且分别对应x轴方向、y轴方向及z轴方向的x轴信号感应器、y轴信号感应器和z轴信号感应器以及设置于x轴信号感应器、y轴信号感应器和z轴信号感应器的信号辐射方向上且对应于所述第一位置、第二位置和第三位置的x轴挡板、y轴挡板及z轴挡板。
33、本发明通过在机械手上安装采集机构来采集三轴距离并利用三轴距离相对于机械手构建三维空间坐标系,通过建模的方式还原产品在三维空间坐标系中的位置,基于特征点的提取确定产品在三维空间坐标系中的位置,从而对机械手的坐标进行调试,大量缩减了人为调试的时间,提高了生产效率并降低了人力成本;同时,在机械手的运行过程中,处理器采集产品的实体图像,并根据产品的实体图像与建模的理论图像在三维空间坐标系中的位置,计算出产品的实际位置与理论位置之间的位置偏差和角度偏差,利用该偏差对机械手在运行过程中的运行轨迹进行自适应修正,能够适应产品在不同状态下的位置,避免因料偏导致机械手取放料不到位,从源头上解决了料偏导致的异常报警情况,进一步提高了生产效率并降低了人力成本。
- 还没有人留言评论。精彩留言会获得点赞!