基于电磁离合自适应螺栓拧紧装置的螺栓紧固方法与流程
本发明属于电力角钢塔螺栓紧固作业,具体涉及一种基于电磁离合自适应螺栓拧紧装置的螺栓紧固方法。
背景技术:
1、电力角钢塔是将角钢通过螺栓或焊接而成的桁架结构,主要由四根主角钢主材和一些用于斜拉支撑的辅材构造而成;角钢主材与地基呈一定倾斜角度布置,角钢主材间采用外包角钢并加螺栓固定连接,斜材与角钢主材间采用螺栓直连或外加节点板,同时还会沿角钢塔高度方向布置大量水平外延的脚钉从而供人工检查所用。随着机械化的普及,目前越来越多的角钢塔用机器人开始应运而生,如杆塔机器人等,工作方向包括但不局限于实现日常巡检、线路搭接乃至螺栓紧固甚至复紧等。如专利公告号为“cn113458744a”的名称为“一种套筒辅助更换匣以及应用该辅助更换匣的检修机器人”的专利中就记载有相应的专用于螺栓复紧的杆塔机器人;当前,该类杆塔机器人仍然秉持着“单一规格套筒匹配单一规格螺栓”的点对点式安装思路,而由于电机角钢塔上螺栓众多且规格不一,当螺栓规格产生变化时,就需要通过辅助更换匣来实现套筒更换,显然存在操作上的繁琐问题,也相应的增加了整体结构的复杂度和成本。此外,传统的固定式的套筒由于强调口径的匹配性,因此对定位要求非常高,不仅人工很难每次都精准套入待作业螺栓,机器人也需要配备较高精度的视觉定位设备,对机器成本的影响性较大,这也是本领域近年来亟待解决的技术问题。
技术实现思路
1、本发明的目的是克服上述现有技术的不足,提供一种基于电磁离合自适应螺栓拧紧装置的螺栓紧固方法,其不仅能一机多用的适应不同规格的螺栓安装操作,无需在线更换套筒,同时具备工作稳定灵活的优点。
2、为实现上述目的,本发明采用了以下技术方案:
3、一种基于电磁离合自适应螺栓拧紧装置的螺栓紧固方法,其特征在于:该电磁离合自适应螺栓拧紧装置包括安装于机架上的自定心卡盘以及用于驱动自定心卡盘产生自回转动作的打击动力源;其中:
4、自定心卡盘包括沿轴向依序同轴布置的从动齿轮、安装座及滑座,滑座处设置径向滑槽从而安放滑动卡爪;从动齿轮上设置涡卷状的弧形导向槽,安装座处布置孔型长度方向沿安装座径向延伸的中间导向孔,滑动卡爪处轴向凸设有滑销,滑销穿过中间导向孔后与弧形导向槽间形成孔轴插接式滑移配合;滑动卡爪产生夹持动作时的从动齿轮回转方向与自定心卡盘作拧紧动作时的转动方向彼此反向;夹持动力源的输出轴通过电磁离合器连接主动齿轮,主动齿轮与从动齿轮形成啮合配合;
5、还包括以下步骤:
6、s1、自定心卡盘张开,三个以上的滑动卡爪所围合形成的套筒套入待拧紧螺栓的螺母端;
7、s2、电磁离合器通电并进入闭合状态,夹持动力源正转带动主动齿轮转动,主动齿轮带动从动齿轮转动;同时,打击动力源产生反向制动转矩,限制自定心卡盘张开动作时产生自转,直至自定心卡盘完全夹紧待拧紧螺栓;随后,电磁离合器断电,夹持动力源停止动作;
8、s3、打击动力源通电正转,同时电磁离合器进入低电压工作模式,也即处于小摩擦力吸附状态,限制滑动卡爪产生松动动作;打击动力源持续转动,待拧紧螺栓被拧紧在操作面上;
9、s4、当螺栓拧紧流程完成后,电磁离合器重新通电并进入闭合状态,夹持动力源开始反转,此时打击动力源同步进行低电压正向制动,从而确保自定心卡盘逐渐张开的同时限制自定心卡盘自转;
10、s5、电磁离合器断电,打击动力源断电,张开状态的自定心卡盘脱离已拧紧的螺栓,拧紧作业完成。
11、优选的,所述打击动力源为打击电机,打击动力源与自定心卡盘同轴布置;打击动力源的打击轴贯穿从动齿轮后,与安装座间形成止转式的固定配合。
12、优选的,所述安装座处同轴的贯穿设置有方孔,打击轴为方轴结构,打击轴穿入该方孔后,依靠轴向螺钉将打击轴紧固于方孔处。
13、优选的,各滑动卡爪绕自定心卡盘的周向依序均布;滑动卡爪的顶端凹设有角槽状的配合口,各滑动卡爪的配合口彼此配合从而抱合待拧紧螺栓的螺母端。
14、优选的,所述夹持动力源为夹持电机;夹持动力源通过联轴器同轴固定在电磁离合器上。
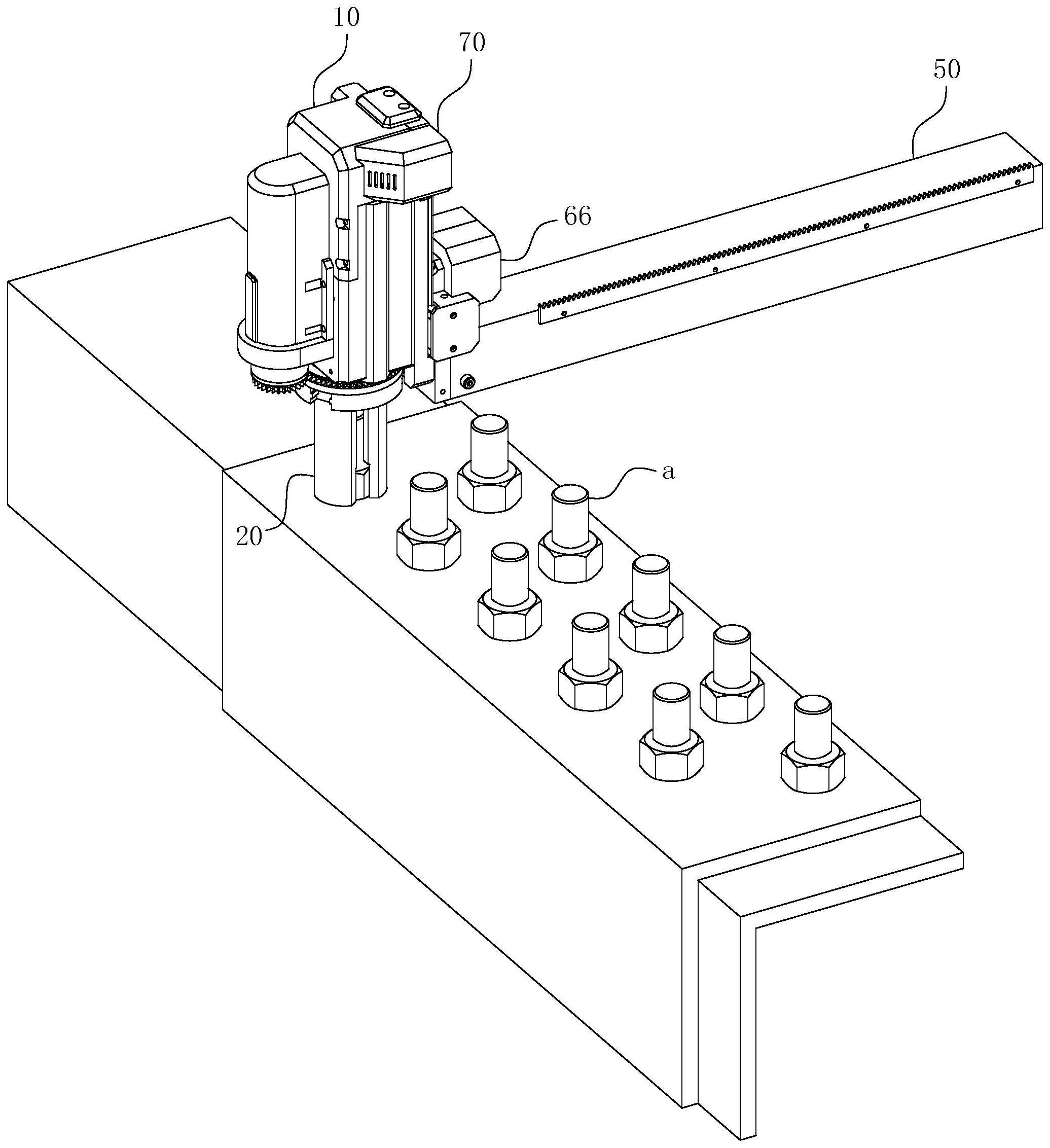
15、优选的,该电磁离合自适应螺栓拧紧装置还包括导引组件,导引组件包括固定在举升臂处的升降架,升降架上安装导引电机,且升降架通过滑块固定在机架处的滑轨上;机架处还布置长度方向平行自定心卡盘轴线的齿条,导引电机的输出轴通过第一同步齿轮啮合在齿条处。
16、优选的,该电磁离合自适应螺栓拧紧装置还包括固定于升降架上的编码器,编码器的输入轴通过第二同步齿轮啮合在齿条处;第一同步齿轮和第二同步齿轮彼此位置避让。
17、优选的,该电磁离合自适应螺栓拧紧装置还包括用于照射待拧紧螺栓的双目相机,双目相机的照射方向平行自定心卡盘的轴向。
18、本发明的有益效果在于:
19、1)、抛弃了单一匹配式的需高空更换套筒的传统作业模式;本发明通过采用自定心卡盘配合打击动力源的协同动作模式,在本发明作业前可将套筒开口也即自定心卡盘张开至最大状态,便于待拧紧螺栓的套入,减少对视觉和机构定位精度的要求。此外,本发明可用于拧紧不同规格的螺栓,套筒可根据不同螺栓规格自适应夹紧,无需更换套筒,可省去在杆塔高空作业环境下机器人更换套筒的繁琐操作,使用起来非常灵活稳定。
20、2)、进一步的,自定心卡盘采用从动齿轮、安装座及滑座的三层轴向组合构造;工作时,可依托夹持动力源的动作,使得从动齿轮转动,进而带动滑动卡爪产生径向抱合及张开动作,使用十分灵活可靠。同时,需注意滑动卡爪产生夹持动作时的从动齿轮回转方向与自定心卡盘作拧紧动作时的转动方向彼此反向,也即当打击动力源驱动自定心卡盘作拧紧动作时,滑动卡爪因上述反向设计,会越夹越紧,极大的增加了装置的工作稳定性及可靠性,成效显著。
21、3)、电磁离合器,为本发明的核心部件之一。本发明的电磁离合器具备三种工作模式,一种是通电完全吸附,用于夹持电机实现主动驱动功能,进而实现自定心卡盘的夹紧和放开动作;一种是断电断开,以便确保无干涉下的打击电机的独立工作功能;还有一种是小摩擦力吸附,从而在打击电机工作时提供部分工作阻力,确保自定心卡盘的正常夹紧操作。同时,对于打击电机,也有五种工作状态,即正转、反转、停止、正低电压产生一定的转矩和反低电压产生一定的转矩,以便实现相应工作目的,使用非常灵活。
22、4)、进一步的,本发明还增设有导引组件,其目的在于实现在恒定高度下,本发明相对各个待拧紧螺栓的轴向动作功能;尤其对于杆塔机器人等类似自动化机器人而言,工作时尽可能减少其他额外部件的动作是很有必要的,这对提升工作稳定性、工作精度乃至整机协调和动力损耗等均有有利影响。至此,本发明仅仅只需单独的拧紧作业区域的动作,就能完全满足螺栓拧紧作业需求,具备构造简洁且功能完善的优点。
23、5)、本发明在设计时,打击动力源、夹持动力源乃至导引组件的安装或动作方向均为轴向设计,此时搭配轴向照射的双目相机,既进一步确保了各构件的布置紧凑性,又确保了双目相机的无干涉工作效果,视觉定位结构上也更为简化,一举多得。
- 还没有人留言评论。精彩留言会获得点赞!