手持电钻钻孔深度测量显示方法、装置、手持电钻和介质与流程
本技术涉及测量的,尤其是涉及一种手持电钻钻孔深度测量显示方法、装置、手持电钻和介质。
背景技术:
1、目前,相关技术中手持电钻的钻孔深度测量方法,可以测量钻头进入待打孔物体的深度,其中,待打孔物体为需要进行钻孔操作的物体。
2、但是,钻孔的方向包括垂直进入待打孔物体和斜插进入待打孔物体两种方向。当钻孔斜插进入待打孔物体时,无法测量钻头进入待打孔物体最深点距待打孔物体与钻头接触平面的垂直深度。当用户需要在待打孔物体上进行斜插的打孔操作时,若无法测量钻头进入待打孔物体最深点距待打孔物体与钻头接触平面的垂直深度,则可能造成钻孔穿透待打孔物体的结果,导致钻孔操作失败率提升。
3、因此,如何提供一种解决上述技术问题的方案是本领域技术人员目前需要解决的问题。
技术实现思路
1、为了实现高成功率钻孔,本技术提供一种手持电钻钻孔深度测量显示方法、装置、手持电钻和介质。
2、第一方面,本技术提供一种手持电钻钻孔深度测量显示方法,采用如下的技术方案:一种手持电钻钻孔深度测量显示方法,包括:
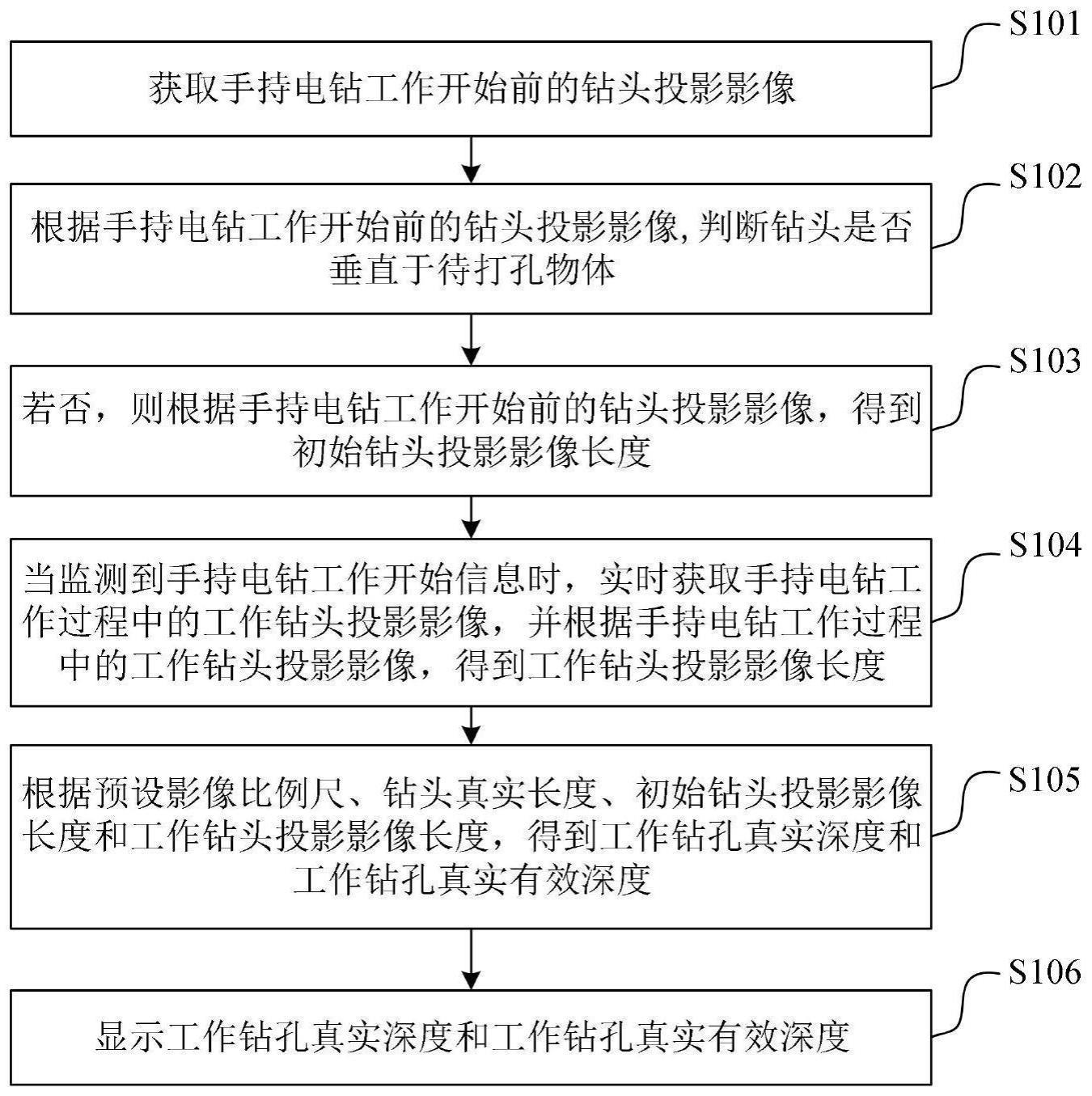
3、获取手持电钻工作开始前的钻头投影影像,其中,钻头投影影像拍摄方向垂直于待打孔物体;根据所述手持电钻工作开始前的钻头投影影像,判断钻头是否垂直于待打孔物体;
4、若否,则根据所述手持电钻工作开始前的钻头投影影像,得到初始钻头投影影像长度,其中,所述初始钻头投影影像长度为手持电钻的钻头在所述手持电钻工作开始前的钻头投影影像中的影像长度;
5、当监测到手持电钻工作开始信息时,实时获取手持电钻工作过程中的工作钻头投影影像,并根据所述手持电钻工作过程中的工作钻头投影影像,得到工作钻头投影影像长度,其中,所述工作钻头投影影像长度为手持电钻的钻头在手持电钻工作过程中的工作钻头投影影像上的影像长度;
6、根据预设影像比例尺、钻头真实长度、所述初始钻头投影影像长度和所述工作工作钻头投影影像长度,得到工作钻孔真实深度和工作钻孔真实有效深度,其中,所述工作钻孔真实深度为钻头进入待打孔物体的深度,所述工作钻孔真实有效深度为钻头进入待打孔物体最深点距待打孔物体的垂直深度;
7、显示所述工作钻孔真实深度和所述工作钻孔真实有效深度。
8、通过采用上述技术方案,获取手持电钻工作开始前的钻头投影影像,并根据所述手持电钻工作开始前的钻头投影影像,判断钻头是否垂直于待打孔物体;若否,则表示不垂直,需要测量工作钻孔真实有效深度,根据手持电钻开始工作前的钻头投影影像,得到初始钻头影像长度,可以确定手持电钻在工作开始前钻头在钻头影像中的影像长度;当监测到手持电钻工作开始信息时,实时获取手持电钻工作过程中的工作钻头投影影像,并根据所述手持电钻工作过程中的工作钻头投影影像,得到工作钻头投影影像长度,可以实时监测手持电钻工作时钻头在钻头影像上的影像长度;相较于相关技术中,由于无法测量钻头进入待打孔物体最深点距待打孔物体与钻头接触平面的垂直深度,可能造成钻孔穿透待打孔物体的结果,在根据预设影像比例尺、钻头真实长度、初始钻头影像长度和实时钻头影像长度,得到工作钻孔真实深度和工作钻孔真实有效深度之后;通过显示工作钻孔真实深度和工作钻孔真实有效深度,可以向手持电钻的使用人员显示钻孔深度,以提升钻孔操作成功率。
9、本技术在一较佳示例中可以进一步配置为:
10、手持电钻上设置三个激光发射装置,每个激光发射装置发射激光的方向与钻头投影影像拍摄方向相同,
11、在所述获取手持电钻工作开始前的钻头投影影像之前,还包括:
12、获取手持电钻工作开始前的测试钻头投影影像,其中,所述测试钻头投影影像至少包括三个激光点影像,
13、根据所述三个激光点影像,确定至少两个激光点影像间距,其中,激光点影像间距为预设两个激光点在所述测试钻头投影影像中的影像间距;
14、根据所述至少两个激光点影像间距,判断所述测试钻头投影影像拍摄方向是否垂直于待打孔物体;
15、若否,则根据所述至少两个激光点影像间距,将所述钻头投影影像拍摄方向调整至垂直于待打孔物体的方向;
16、相应的,所述获取手持电钻工作开始前的钻头投影影像,包括:
17、基于调整后的所述钻头投影影像拍摄方向,获取手持电钻工作开始前的钻头投影影像。
18、通过采用上述技术方案,获取手持电钻工作开始前的测试钻头投影影像,可以得到三个激光点影像间距;若测试钻头投影影像拍摄方向不垂直于待打孔物体,需要对钻头投影影像拍摄方向进行调整;故,可以将三个激光点影像间距作为调整拍摄方向的依据,将拍摄方向调整至垂直于待打孔物体的方向,相较于基于重力方向调整拍摄方向时将待打孔物体的放置方向限定于垂直于重力方向,本方案不再限定待打孔物体的放置方向,可以适用于更多种情景,使手持电钻使用场景更具有灵活性。
19、本技术在一较佳示例中可以进一步配置为:
20、所述根据所述手持电钻工作开始前的钻头投影影像,判断钻头是否垂直于待打孔物体,包括:根据所述手持电钻工作开始前的钻头投影影像,判断钻头是否垂直于待打孔物体,其中,若所述手持电钻工作开始前的钻头投影影像是对称图像,则确定钻头垂直于待打孔物体,反之,则确定钻头不垂直于待打孔物体。
21、通过采用上述技术方案,相较于相关技术中判断手持电钻工作开始前钻头在钻头投影影像中的影像长度与预设初始钻头投影影像长度是否相同时,可能出现由于钻头磨损导致钻头真实长度发生变化,使得即使钻头垂直于待打孔物体时钻头在钻头投影影像中的影像长度小于预设初始钻头投影影像长度,导致判断不准确的情况,本方案通过判断手持电钻工作开始前的钻头投影影像是否为对称图像,可以提升判断钻头是否垂直于待打孔物体的结果的准确性。
22、本技术在一较佳示例中可以进一步配置为:
23、所述根据所述手持电钻工作开始前的钻头投影影像,判断钻头是否垂直于待打孔物体,包括:根据所述手持电钻工作开始前的钻头投影影像,通过识别钻头边缘,得到所述手持电钻工作开始前的钻头投影影像对应的钻头边缘影像;
24、判断所述钻头边缘影像是否为对称图像,其中,若是,则所述手持电钻工作开始前的钻头投影影像是对称图像,反之,所述手持电钻工作开始前的钻头投影影像不是对称图像。
25、通过采用上述技术方案,相较于相关技术中直接判断手持电钻工作开始前的钻头投影影像是否为对称图像时,由于钻头不同位置的磨损情况可能存在不同,导致手持电钻工作开始前的钻头投影影像为对称图像的可能性较低,本方案通过对手持电钻工作开始前的钻头投影影像进行边缘识别,得到钻头边缘影像,可以减少钻头螺纹纹路对判断钻头是否垂直于待打孔物体时的产生影响,以提升判断钻头是否垂直于待打孔物体的结果的准确性。
26、本技术在一较佳示例中可以进一步配置为:
27、在所述判断所述钻头边缘影像是否为对称图像之前,还包括:
28、将所述钻头边缘影像进行平滑处理,得到新的钻头边缘影像;
29、相应的,所述判断所述钻头边缘影像是否为对称图像,包括:
30、判断所述新的钻头边缘影像是否为对称图像。
31、通过采用上述技术方案,相较于相关技术中直接使用钻头边缘影像时,可能由于钻头螺纹纹路在不同时刻采集到的钻头投影影像中可能存在不同,且,钻头螺纹纹路对于钻头是否垂直于待打孔物体并不存在影响;故,本方案可以通过在识别钻头边缘后对螺纹纹路进行平滑处理,得到至新的钻头边缘影像,以减少钻头螺纹纹路对判断任一钻头边缘影像是否为其他任一钻头边缘影像的对称图像的影响。
32、本技术在一较佳示例中可以进一步配置为:
33、手持电钻上钻头位置的两侧分别设置有一摄像装置,摄像装置用于采集钻头投影影像,所述获取手持电钻工作开始前的钻头投影影像,包括:
34、获取手持电钻工作开始前的两个摄像装置各自采集的钻头投影影像;
35、对手持电钻工作开始前的每一钻头投影影像进行拼接特征识别,得到每一钻头投影影像对应的钻头投影特征影像;
36、根据全部钻头投影影像各自对应的钻头投影特征影像,通过拼接,得到手持电钻工作开始前的钻头投影影像。
37、通过采用上述技术方案,将全部钻头投影影像各自对应的钻头投影特征影像进行拼接,得到手持电钻工作开始前的钻头投影影像,相较于相关技术中在手持电钻上安装唯一摄像装置,并利用唯一摄像装置采集到的钻头投影影像,本方案使用两个摄像装置得到手持电钻工作开始前的钻头投影影像更加清晰。
38、本技术在一较佳示例中可以进一步配置为:
39、在所述获取手持电钻工作开始前的钻头投影影像之前,还包括:
40、获取待打孔物体有效深度,其中,所述待打孔物体有效深度为待打孔物体在钻头投影影像的拍摄方向上的厚度;
41、相应的,在所述显示所述工作钻孔真实深度和所述工作钻孔真实有效深度之后,还包括:根据所述工作钻孔真实有效深度和所述待打孔物体有效深度,判断钻孔是否满足预设预警标准;
42、若是,则生成并显示提示信息。
43、通过采用上述技术方案,当钻孔满足预设预警标准时,通过提示用户,可以降低钻孔穿透待打孔物体的概率。
44、第二方面,本技术提供一种手持电钻钻孔深度测量显示装置,采用如下的技术方案:一种手持电钻钻孔深度测量显示装置,包括:
45、钻头投影影像获取模块,用于获取手持电钻工作开始前的钻头投影影像,其中,钻头投影影像拍摄方向垂直于待打孔物体;
46、钻头方向判断模块,用于根据所述手持电钻工作开始前的钻头投影影像,判断钻头是否垂直于待打孔物体,当钻头不垂直于待打孔物体时,触发投影影像长度确定模块;
47、投影影像长度确定模块,用于根据所述手持电钻工作开始前的钻头投影影像,得到初始钻头投影影像长度,其中,所述初始钻头投影影像长度为手持电钻的钻头在所述手持电钻工作开始前的钻头投影影像中的影像长度;
48、开始信息检测模块,用于当监测到手持电钻工作开始信息时,触发工作钻头投影影像长度获取模块;
49、工作钻头投影影像长度获取模块,用于实时获取手持电钻工作过程中的工作钻头投影影像,并根据所述手持电钻工作过程中的工作钻头投影影像,得到工作钻头投影影像长度,其中,所述工作钻头投影影像长度为手持电钻的钻头在手持电钻工作过程中的工作钻头投影影像上的影像长度;
50、钻孔深度确定模块,用于根据预设影像比例尺、钻头真实长度、所述初始钻头投影影像长度和所述工作钻头投影影像长度,得到工作钻孔真实深度和工作钻孔真实有效深度,其中,所述工作钻孔真实深度为钻头进入待打孔物体的深度,所述工作钻孔真实有效深度为钻头进入待打孔物体最深点距待打孔物体的垂直深度;
51、钻孔深度显示模块,用于显示所述工作钻孔真实深度和所述工作钻孔真实有效深度。
52、第三方面,本技术提供一种手持电钻,采用如下的技术方案:
53、至少一个处理器;
54、存储器;
55、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,所述至少一个应用程序配置用于:执行如第一方面任一项所述的手持电钻钻孔深度测量显示方法。
56、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
57、一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令所述计算机执行如第一方面任一项所述的手持电钻钻孔深度测量显示方法。
58、综上所述,本技术包括以下至少一种有益技术效果:
59、1.通过获取钻头影像,并判断钻头影像是否为预设对称图像,可以确定钻头与目标打孔平面是否垂直;若否,则表示不垂直,需要测量工作钻孔真实有效深度,根据手持电钻开始工作前的钻头投影影像,得到初始钻头影像长度,可以确定手持电钻在工作开始前,钻头在钻头影像中的影像长度;当监测到手持电钻工作开始信息时,实时获取实时钻头影像长度,可以实时监测手持电钻工作时钻头在钻头影像上的影像长度;相较于相关技术中,由于无法测量钻头进入待打孔物体最深点距待打孔物体与钻头接触平面的垂直深度,可能造成钻孔穿透待打孔物体的结果,在根据预设影像比例尺、钻头真实长度、初始钻头影像长度和实时钻头影像长度,得到工作钻孔真实深度和工作钻孔真实有效深度之后;通过显示工作钻孔真实深度和工作钻孔真实有效深度,可以向手持电钻的使用人员提示钻孔深度,以提升钻孔操作成功率。
60、2.通过获取手持电钻工作开始前的测试钻头投影影像,可以得到三个激光点影像间距;若测试钻头投影影像拍摄方向不垂直于待打孔物体,需要对钻头投影影像拍摄方向进行调整;故,可以将三个激光点影像间距作为调整拍摄方向的依据,将拍摄方向调整至垂直于待打孔物体的方向,相较于基于重力方向调整拍摄方向时将待打孔物体的放置方向限定于垂直于重力方向,本方案不再限定待打孔物体的放置方向,可以适用于更多种情景,使手持电钻使用场景更具有灵活性。
- 还没有人留言评论。精彩留言会获得点赞!