一种船舶格子间焊接机器人的夹持机构
本发明属于机械夹持,涉及了一种格子间焊接机器人的夹持机构;具体的是,涉及了一种船舶格子间焊接机器人的夹持机构。
背景技术:
1、现在的舱室作业机器人多是采用爬壁机器人或者龙门吊的方式,这些方式都存在着一定的缺陷,爬壁机器人这种方式由于要带较重的负载,可能会存在吸附力不强的缺陷,其中较多的是采用磁吸附方式,只适用于导磁性材料,对环境的适应性较差。龙门吊的方式,由于结构比较大,灵活性差,操作不方便,容易造成一些安全隐患。想要同时解决这两个问题就需要一种焊接机器人的夹持机构,在实现应有功能的基础上,节省了大量的人工和机械成本。
技术实现思路
1、发明目的:本发明的目的是提供了一种船舶格子间焊接机器人的夹持机构,从而解决了焊接机器人与环境之间的适应性问题和越障问题。
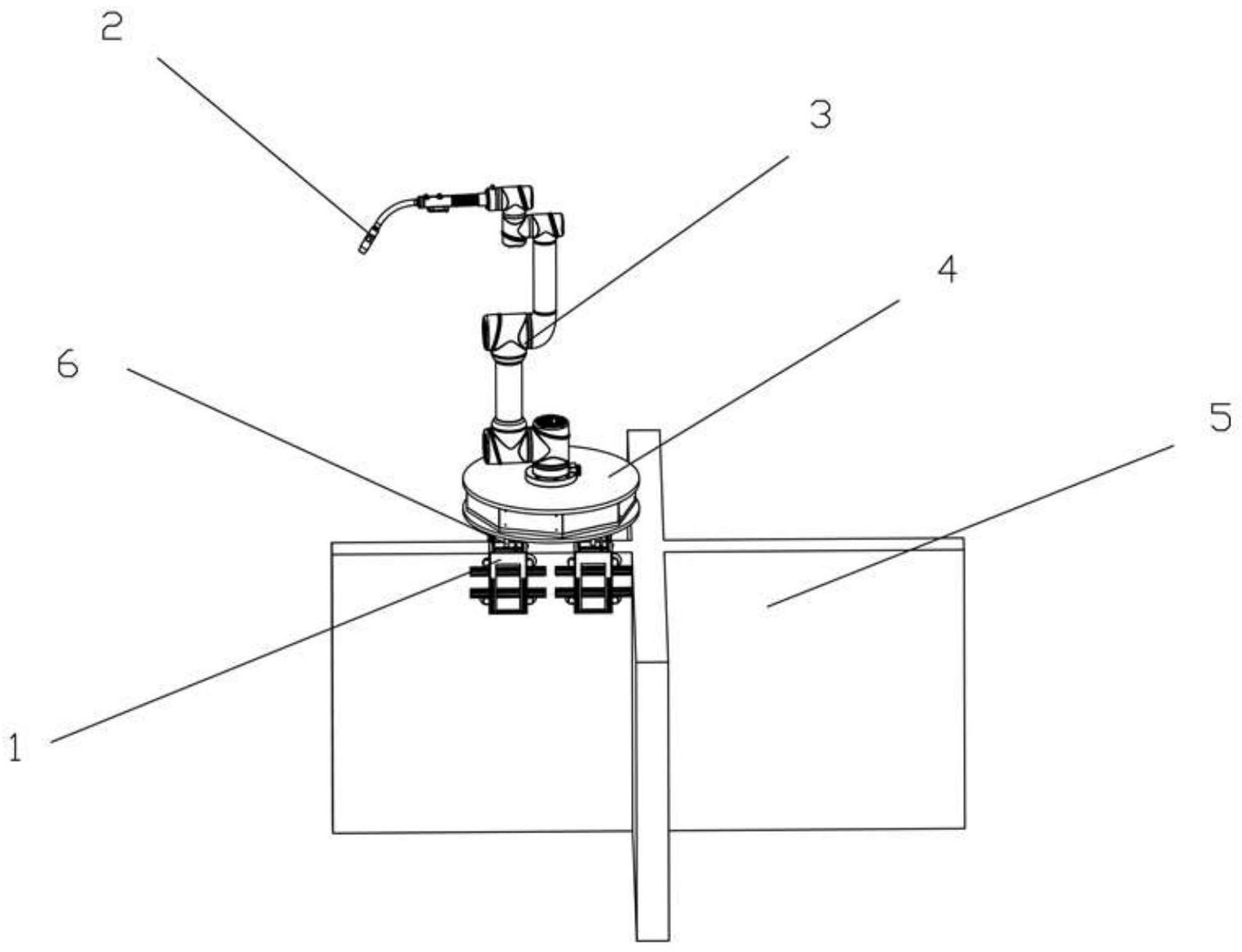
2、技术方案:本发明所述的一种船舶格子间焊接机器人的夹持机构,其结构包括相互连接的夹持装置、焊枪、机械臂、旋转装置、格子板及移动装置;
3、所述焊枪通过法兰连接于六轴的机械臂的末端,所述六轴的机械臂通过螺栓将其底座连接于所述夹持装置上,通过夹持装置将其固定于工件,通过两对夹臂的交错运动下实现横向运动;
4、通过旋转装置可以带动机器人旋转,使机械臂的工作空间增大,并能够实现快速的转向,从而实现焊接机器人的平移并提高工作效率。
5、进一步地,所述夹持装置包括左右夹臂(夹臂框架)、传动轴、大齿轮一、齿条一、齿条二、伸缩杆、固定导轨(导轨底座、导轨)、滑轨框架、吸盘、吸盘支架、电机一以及螺栓、锁紧螺母;
6、所述左右夹臂通过螺栓固定在滑轨框架上,在所述的夹臂上设有伸缩杆支撑架,用于和伸缩杆连接,所述导轨的底座通过螺栓连接固定在夹臂上并于滑轨框架通过导轨相连,齿条固定在齿条支撑架上,两边齿条同时与中间的大齿轮一啮合,同时大齿轮一与小齿轮啮合,通过电机一带动,实现齿轮齿条的传动,带动夹臂实行夹紧功能。
7、进一步地,所述夹持装置末端安装有吸盘装置,所述吸盘装置包括吸盘及吸盘支架;所述吸盘通过吸盘支架固定在左右夹臂的末端,增加夹持装置的稳定性,同时减小对工件的损伤。
8、进一步地,所述旋转装置包括电机二、旋转台、大齿轮二、蜗杆、连接轴、挡板、涡轮、蜗杆轴承及蜗杆支座等,
9、所述电机二固定于底板上的电机支座上,通过输出轴与蜗杆连接,所述蜗杆通过蜗杆轴承固定于蜗杆支座上,连接轴连接蜗杆支座的上下底板并于蜗轮通过顶丝连接,通过蜗杆带动旋转台上的大齿轮二,实现旋转台的旋转在,旋转台下方通过固定轴与夹持装置连接,实现夹持装置的旋转。
10、进一步地,所述移动装置包括气缸支座、连接杆、滑块、滑轨及气缸等;
11、所述气缸固定于气缸支座上,气缸支座与滑块相连接,连接杆两端分别于滑块和夹臂框架相连接,通过气缸的伸缩带动夹持机构横向移动,实现焊接机械臂在格板上左右移动。
12、有益效果:本发明与现有技术相比,本发明的特点是:本发明所述的一种格子间焊接机器人的夹持机构,通过夹持装置与旋转装置的组合,实现了焊接机器人工作时位置的转移。具体的,本发明通过大齿轮带动连接于左右夹臂的齿条进行齿轮齿条传动,实现夹持装置的夹紧功能,并通过两对夹臂之间的气缸实现夹臂之间的配合运动,从而达到焊接机器人的横向移动的目的。本发明可以满足焊接机器人在工作环境中灵活的工作,提高作业效率,实用性强。
技术特征:
1.一种船舶格子间焊接机器人的夹持机构,其特征在于,包括“十字”状的格子板(5),在所述格子板(5)的一侧板上安置有夹持装置(1),在所述夹持装置(1)上连接有移动装置(6);在所述移动装置(6)的上侧位置安置有旋转装置(4)。
2.根据权利要求1所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
3.根据权利要求2所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
4.根据权利要求2所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
5.根据权利要求3所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
6.根据权利要求1所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
7.根据权利要求2所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
8.根据权利要求1所述的一种船舶格子间焊接机器人的夹持机构,其特征在于:
技术总结
本发明公开了一种船舶格子间焊接机器人的夹持机构。属于机械夹持技术领域,包括夹持装置、焊枪、机械臂、旋转装置、格子板及移动装置等设备;所述机器人本体由机械臂和焊枪组成,是完成焊接工作的主体,所述夹紧装置由四条夹臂以及驱动机构组成,所述旋转装置与四条夹臂连接,其结构包括旋转平台、驱动装置,本发明中,机器人运动过程中,通过两对夹臂的相互配合实现横向移动。本发明适用于船舶复杂舱室,尤其是带有格子结构的格子间舱室的焊接工作,提高爬壁焊接机器人对环境的适应性和功能性。
技术研发人员:李恒,胡秋实,李磊,张舜禹,郭晨晓,康青仪,甄佳泽
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!