一种柔性自动化双机器人联动钣金折弯工作站的制作方法
本发明属于机械零件加工,具体涉及一种柔性自动化双机器人联动钣金折弯工作站。
背景技术:
1、折弯工件有着涉及行业跨度大、品种多、尺寸相差大、精度要求高等特点,传统行业通常以人工操作折弯机与吊装设备进行折弯作业,从而实现多品种兼容,并通过每件必检以实现质量控制,但是人工的繁琐工艺会限制生产效率制约产能释放,而且折弯工件的一致性也会存在偏差。
2、中国专利cn201921989116.7公开了一种折弯机双工位上下料工作站,其虽然提高了加工效率,但是工件一致性较差,无法实现多种产品的兼容加工。
3、因此,如何提供一种柔性自动化双机器人联动钣金折弯工作站是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种柔性自动化双机器人联动钣金折弯工作站,产能翻倍,效率高,每台机器人配置两套不同的磁吸手爪,解决了不同工件的柔性兼容问题,生产一致性高。
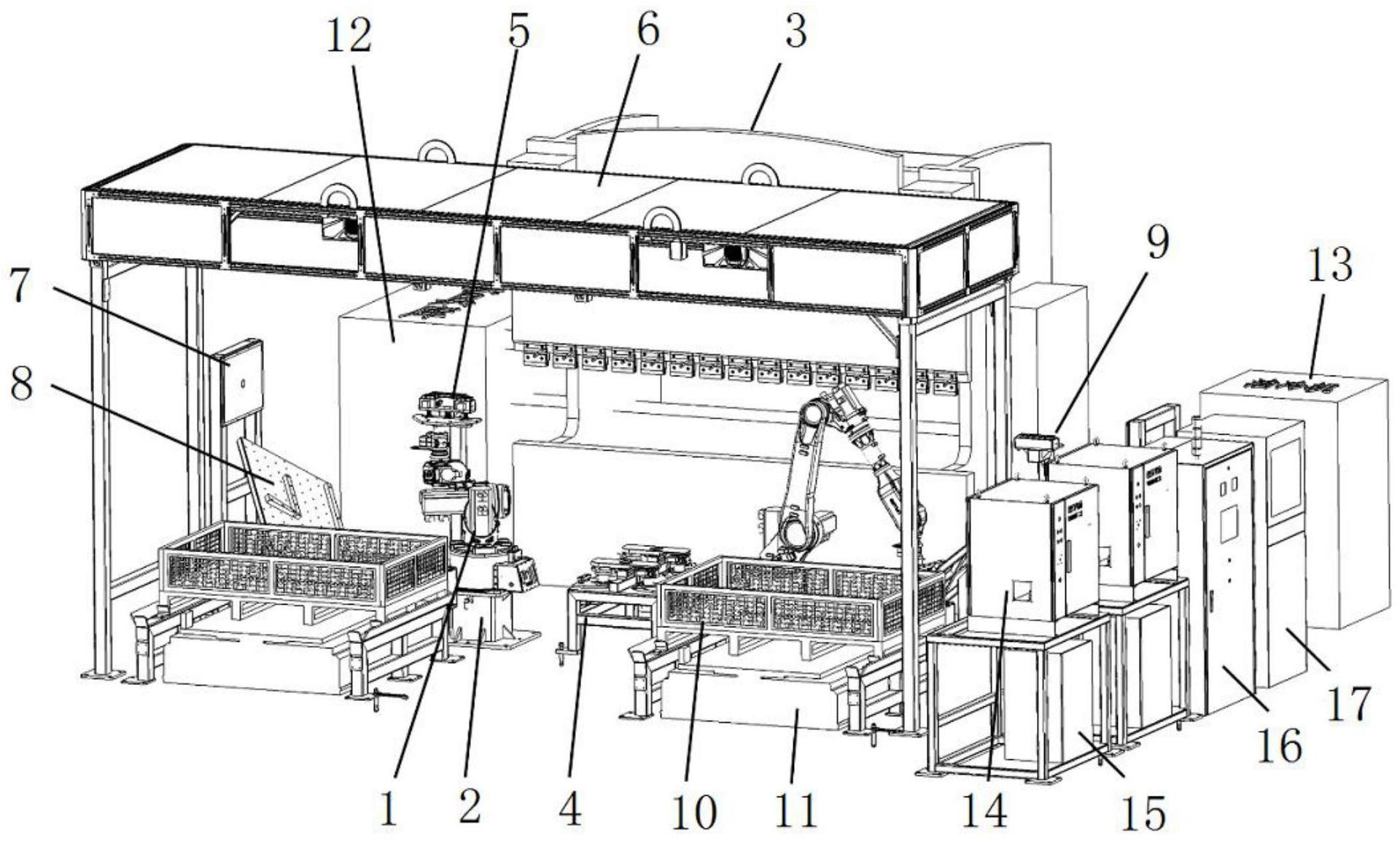
2、为了达到上述目的,本发明采用如下技术方案:一种柔性自动化双机器人联动钣金折弯工作站,其包括:
3、搬运机器人,所述搬运机器人有两台且对称布置在折弯机的一端两侧,所述搬运机器人的执行端可拆卸连接有磁吸手爪;
4、手爪快换台,所述手爪快换台位于两台搬运机器人之间,所述手爪快换台上放置多种规格的磁吸手爪;
5、agv搬运车,所述agv搬运车有两台且分别一一对应配合两台搬运机器人使用,所述agv搬运车上固定有盛料盘;
6、3d视觉定位系统,所述3d视觉定位系统布置在所述搬运机器人远离所述折弯机的一侧且确定所述agv搬运车的位置信息;
7、对中台,所述对中台有两组且分别布置在两台搬运机器人相远离的外侧,所述磁吸手爪抓取工件放置在对中台上进行机器人搬运工件的位置校准;
8、2d视觉定位系统,所述2d视觉定位系统布置在所述对中台远离搬运机器人的一侧,所述2d视觉定位系统通过拍照判断重力对中后工件的精准位置,所述磁吸手爪抓取定位后的工件进行折弯作业;
9、工作站总控柜,所述工作站总控柜分别与搬运机器人、手爪快换台、agv搬运车、3d视觉定位系统、2d视觉定位系统、磁吸手爪及折弯机电信号连接。
10、本发明的有益效果是:agv搬运车配合盛料盘实现上、下料作业,上料时使用搬运机器人及磁吸手爪完成工件的抓取,此过程中配合3d视觉定位系统、对中台及2d视觉定位系统完成工件的精准上料作业,保证后续折弯机的折弯精度,磁吸手爪与搬运机器人的执行端快拆卸连接,配备多种不同规格的磁吸手爪,可完成不同规格工件的柔性兼容作业,自动化程度高,配合对中台使得工件加工一致性程度高,产能翻倍。
11、优选的,所述搬运机器人为六轴搬运机器人,所述搬运机器人固定在机器人底座上,所述搬运机器人的执行端通过螺栓连接有快换母头。
12、优选的,所述磁吸手爪包括基板、快换子头、直线导轨、弹簧、电永磁铁及传感器,所述快换子头固定在所述基板上,所述快换子头与所述快换母头可拆卸连接,所述基板上并排布置有多个导向孔,所述直线导轨有多根且分别一一对应滑动连接在多个导向孔内,所述直线导轨的顶端伸出导向孔与限位板固连,所述弹簧位于所述直线导轨的外侧且位于基板的底部,所述直线导轨的底端固定连接所述电永磁铁,所述传感器固定在所述电永磁铁的一侧探测工件位置,所述磁吸手爪与磁吸手爪控制柜电信号连接,所述磁吸手爪控制柜与所述工作站总控柜电连接。
13、优选的,所述手爪快换台的顶部中间设有回转气缸,所述回转气缸的执行端设有防尘板,所述手爪快换台的一侧设有控制回转气缸执行端运转的气缸驱动器,所述手爪快换台上设有多个手爪缓存位,所述磁吸手爪适配放置在所述手爪缓存位上,所述磁吸手爪上的快换子头位于防尘板的下方。
14、优选的,所述3d视觉定位系统包括视觉框架及3d相机,所述3d相机固定在视觉框架上,所述3d相机电信号连接视觉系统控制柜,所述视觉系统控制柜与所述工作站总控柜电连接。
15、优选的,所述2d视觉定位系统包括支架、相机面板、2d相机,所述2d相机通过相机支架固定在相机面板上,所述相机面板固定在支架的顶部边缘,所述2d相机与所述视觉系统控制柜电信号连接。
16、优选的,所述对中台包括立柱、滑动面板、第一挡边组件及第二挡边组件,所述滑动面板倾斜固定在所述立柱的顶端,所述滑动面板上开设有阵列式的安装孔位,所述第一挡边组件及第二挡边组件分别通过螺栓固定在安装孔位上。
17、优选的,所述第一挡边组件中的两条短边具有一定夹角且对中异形工件,所述第二挡边组件中的两条挡边呈规则的直角布置在滑动面板上,所述第二挡边组件对中规则的直角工件,所述第二挡边组件位于所述第一挡边组件的斜下方。
18、优选的,还包括工件磁吸缓存装置,所述工件磁吸缓存装置位于所述搬运机器人的一侧缓存搬运工件,所述工件磁吸缓存装置上设有用于吸放工件的电永磁铁。
技术特征:
1.一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,包括:
2.根据权利要求1所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述搬运机器人为六轴搬运机器人,所述搬运机器人固定在机器人底座上,所述搬运机器人的执行端通过螺栓连接有快换母头。
3.根据权利要求2所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述磁吸手爪包括基板、快换子头、直线导轨、弹簧、电永磁铁及传感器,所述快换子头固定在所述基板上,所述快换子头与所述快换母头可拆卸连接,所述基板上并排布置有多个导向孔,所述直线导轨有多根且分别一一对应滑动连接在多个导向孔内,所述直线导轨的顶端伸出导向孔与限位板固连,所述弹簧位于所述直线导轨的外侧且位于基板的底部,所述直线导轨的底端固定连接所述电永磁铁,所述传感器固定在所述电永磁铁的一侧探测工件位置,所述磁吸手爪与磁吸手爪控制柜电信号连接,所述磁吸手爪控制柜与所述工作站总控柜电连接。
4.根据权利要求3所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述手爪快换台的顶部中间设有回转气缸,所述回转气缸的执行端设有防尘板,所述手爪快换台的一侧设有控制回转气缸执行端运转的气缸驱动器,所述手爪快换台上设有多个手爪缓存位,所述磁吸手爪适配放置在所述手爪缓存位上,所述磁吸手爪上的快换子头位于防尘板的下方。
5.根据权利要求4所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述3d视觉定位系统包括视觉框架及3d相机,所述3d相机固定在视觉框架上,所述3d相机电信号连接视觉系统控制柜,所述视觉系统控制柜与所述工作站总控柜电连接。
6.根据权利要求5所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述2d视觉定位系统包括支架、相机面板、2d相机,所述2d相机通过相机支架固定在相机面板上,所述相机面板固定在支架的顶部边缘,所述2d相机与所述视觉系统控制柜电信号连接。
7.根据权利要求1所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述对中台包括立柱、滑动面板、第一挡边组件及第二挡边组件,所述滑动面板倾斜固定在所述立柱的顶端,所述滑动面板上开设有阵列式的安装孔位,所述第一挡边组件及第二挡边组件分别通过螺栓固定在安装孔位上。
8.根据权利要求7所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,所述第一挡边组件中的两条短边具有一定夹角且对中异形工件,所述第二挡边组件中的两条挡边呈规则的直角布置在滑动面板上,所述第二挡边组件对中规则的直角工件,所述第二挡边组件位于所述第一挡边组件的斜下方。
9.根据权利要求1所述的一种柔性自动化双机器人联动钣金折弯工作站,其特征在于,还包括工件磁吸缓存装置,所述工件磁吸缓存装置位于所述搬运机器人的一侧缓存搬运工件,所述工件磁吸缓存装置上设有用于吸放工件的电永磁铁。
技术总结
本发明公开了一种柔性自动化双机器人联动钣金折弯工作站,其包括:搬运机器人,搬运机器人的执行端连接有磁吸手爪;手爪快换台上放置多种规格的磁吸手爪;AGV搬运车有两台且分别一一对应配合两台搬运机器人使用,AGV搬运车上固定有盛料盘;3D视觉定位系统用于确定AGV搬运车的位置信息;对中台有两组且分别布置在两台搬运机器人相远离的外侧对中工件,磁吸手爪抓取工件放置在对中台上进行机器人搬运工件的位置校准;2D视觉定位系统通过拍照判断重力对中后工件的精准位置,磁吸手爪抓取定位后的工件进行折弯作业;工作站总控柜分别与搬运机器人、手爪快换台、AGV搬运车、3D视觉定位系统、2D视觉定位系统、磁吸手爪及折弯机电信号连接。
技术研发人员:高如意,公茂震,郝云保,陈庆庆,臧立东,肖喜超
受保护的技术使用者:北京计算机技术及应用研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!