一种导管柔性装配平台及装配方法与流程
本发明涉及导管装配焊接,具体涉及一种导管柔性装配平台及装配方法。
背景技术:
1、导管作为输送流体介质的通道,在航空航天,船舶,汽车领域都有广泛的应用,导管具有空间形状复杂,加工制造要求精度高等技术难点,在实际制造过程中针对预制类导管的装焊需定制专用工装,导致工装数量庞大,对于取样类导管的制造更为困难,目前管路取样均采用人工现场测量的方式完成,取样回据精度差,管路制造完成后与实物配合误差非常大,需反复锉修,工序繁琐,制造效率和精度都很低,难以满足导管装配制造需求。
技术实现思路
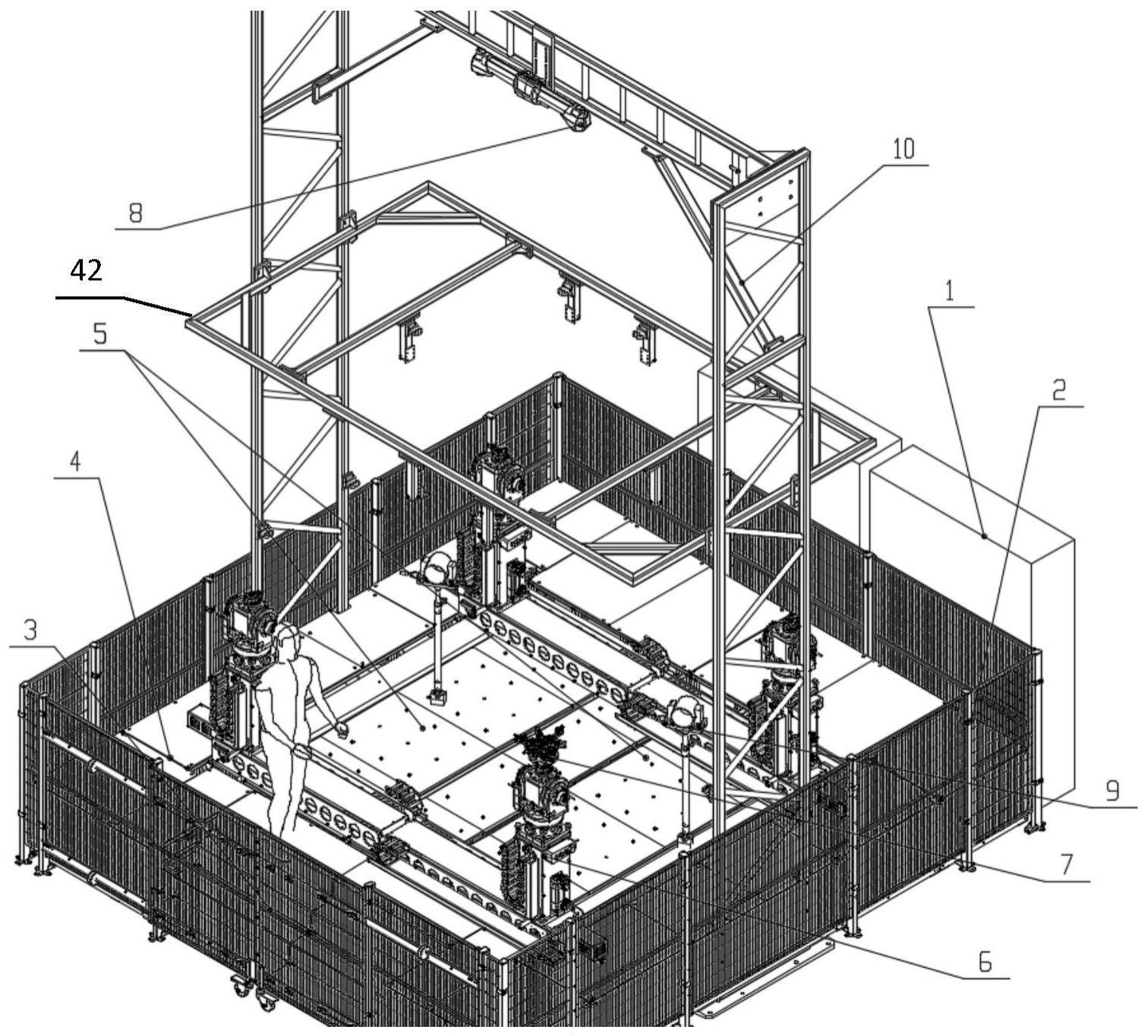
1、为了解决目前导管装配制造过程中效率低、精度差的问题,本发明提出了一种导管柔性装配平台,包括底座、至少两个设置在所述底座上的六轴移动单元、连接在所述六轴移动单元末端用于夹持导管或导管配件的工装、设置在所述六轴移动单元上方的跟踪系统以及控制台;所述六轴移动单元、跟踪系统分别与所述控制台电连接。
2、优选的,所述六轴移动单元为三移动及三转动结构,所述三移动分别为x运动轴、y运动轴和z运动轴,且每两组所述六轴移动单元共用一个所述x运动轴。
3、优选的,所述导管柔性装配平台还包括滑动布置在所述底座上的辅助支撑。
4、优选的,所述x运动轴包括两条平行的滑轨组件、与两条所述滑轨组件垂直滑动连接的连接轴组件、与所述连接轴组件连接的x轴执行器以及固定在所述底座上且与所述滑轨组件平行设置的光栅尺;所述y运动轴平行连接在所述连接轴组件的上方,所述x轴执行器和光栅尺分别与所述控制台电连接。
5、优选的,所述滑轨组件包括固定在所述底座上的x轴滑轨滑块和齿条,所述连接轴组件包括长连接轴、固定连接在所述长连接轴两端的两个支撑座和套设在所述长连接轴上的两个齿轮,所述两个齿轮分别与两个所述齿条啮合连接,所述两个支撑座分别与两个所述x轴滑轨滑块滑动连接;所述光栅尺与其中一个所述支撑座连接。
6、优选的,所述y运动轴包括y轴安装座和与所述y轴安装座滑动连接的y轴移动件,所述y轴安装座连接在所述两个支撑座的上方,所述z运动轴连接在所述y轴移动件的上方。
7、优选的,所述三转动分别为第四轴、第五轴和第六轴;所述第四轴与所述z运动轴连接;所述第五轴分别与所述第四轴和第六轴连接;所述第六轴与所述工装连接。
8、优选的,所述第四轴包括与所述z运动轴连接的转轴、分别与所述转轴连接的四轴角度传感器和四轴执行器;所述四轴执行器和四轴角度传感器分别与所述控制台电连接。
9、基于同一发明思路,本发明还提出一种采用所述导管柔性装配平台进行导管装配的方法,所述方法包括:
10、对导管接口的位置数据进行采样,获得导管接口采样数据;
11、控制台基于所述导管接口采样数据计算所述六轴移动单元的末端位置坐标,并根据所述末端位置坐标控制所述六轴移动单元移动至相应位置上;
12、由所述跟踪系统对所述六轴移动单元的末端实际位置进行监测,并将监测数据发送至所述控制台;
13、所述控制台根据所述监测数据将所述六轴移动单元的末端位置调整至准确位置;
14、将导管安装到所述工装上进行装配。
15、优选的,将导管安装到所述工装上进行装配包括:将导管的端部固定在所述工装上与其它管段进行点焊;将导管取下进行满焊;将满焊后的导管放至所述工装进行比对,直至全部焊接完成。
16、与现有技术相比,本发明的有益效果为:
17、本发明提供的一种导管柔性装配平台,通过控制台控制六轴移动单元的移动,由跟踪系统对六轴移动单元的末端位置进行实时监测,并将监测数据反馈给控制台,从而使六轴移动单元的末端到达预定位置;本发明的导管装配方法采用导管柔性装配平台,利用控制台基于导管接口采样数据计算导管的末端位置坐标,并控制六轴移动单元移动至相应位置,通过跟踪系统对六轴移动单元的末端位置进行实时监测,并将监测数据反馈给控制台,控制台根据监测数据对六轴移动单元的末端位置进行调整,使其到达准确位置,最后固定导管完成装配。本发明的导管柔性装配平台及装配方法通过控制台和跟踪系统的配合对六轴移动单元的末端位置进行精确控制,从而为导管的装配提供精确定位,大大提高了导管装配过程的效率和精度。
技术特征:
1.一种导管柔性装配平台,其特征在于,包括底座(11)、至少两个设置在所述底座(11)上的六轴移动单元(6)、连接在所述六轴移动单元(6)末端用于夹持导管或导管配件的工装(7)、设置在所述六轴移动单元(6)上方的跟踪系统(8)以及控制台(1);所述六轴移动单元(6)、跟踪系统(8)分别与所述控制台(1)电连接。
2.如权利要求1所述的导管柔性装配平台,其特征在于,所述六轴移动单元(6)为三移动及三转动结构,所述三移动分别为x运动轴(12)、y运动轴(13)和z运动轴(14),且每两组所述六轴移动单元(6)共用一个所述x运动轴(12)。
3.如权利要求1所述的导管柔性装配平台,其特征在于,所述导管柔性装配平台还包括滑动布置在所述底座(11)上的辅助支撑(9)。
4.如权利要求2所述的导管柔性装配平台,其特征在于,所述x运动轴(12)包括两条平行的滑轨组件、与两条所述滑轨组件垂直滑动连接的连接轴组件、与所述连接轴组件连接的x轴执行器(23)以及固定在所述底座(11)上且与所述滑轨组件平行设置的光栅尺(22);所述y运动轴(13)平行连接在所述连接轴组件的上方,所述x轴执行器(23)和光栅尺(22)分别与所述控制台(1)电连接。
5.如权利要求4所述的导管柔性装配平台,其特征在于,所述滑轨组件包括固定在所述底座(11)上的x轴滑轨滑块(18)和齿条(19),所述连接轴组件包括长连接轴(21)、固定连接在所述长连接轴(21)两端的两个支撑座(26)和套设在所述长连接轴(21)上的两个齿轮(20),所述两个齿轮(20)分别与两个所述齿条(19)啮合连接,所述两个支撑座(26)分别与两个所述x轴滑轨滑块(18)滑动连接;所述光栅尺(22)与其中一个所述支撑座(26)连接。
6.如权利要求5所述的导管柔性装配平台,其特征在于,所述y运动轴(13)包括y轴安装座和与所述y轴安装座滑动连接的y轴移动件,所述y轴安装座连接在所述两个支撑座(26)的上方,所述z运动轴(14)连接在所述y轴移动件的上方。
7.如权利要求2所述的导管柔性装配平台,其特征在于,所述三转动分别为第四轴(15)、第五轴(16)和第六轴(17);所述第四轴(15)与所述z运动轴(14)连接;所述第五轴(16)分别与所述第四轴(15)和第六轴(17)连接;所述第六轴(17)与所述工装(7)连接。
8.如权利要求7所述的导管柔性装配平台,其特征在于,所述第四轴(15)包括与所述z运动轴(14)连接的转轴(31)、分别与所述转轴(31)连接的四轴角度传感器(32)和四轴执行器(29);所述四轴执行器(29)和四轴角度传感器(32)分别与所述控制台(1)电连接。
9.一种采用如权利要求1~8任一项所述的导管柔性装配平台进行导管装配的方法,其特征在于,所述方法包括:
10.如权利要求9所述的导管柔性装配平台进行导管装配的方法,其特征在于,将导管安装到所述工装(7)上进行装配包括:将导管的端部固定在所述工装(7)上与其它管段进行点焊;将导管取下进行满焊;将满焊后的导管放至所述工装(7)进行比对,直至全部焊接完成。
技术总结
本发明提供一种导管柔性装配平台及装配方法,该装配平台包括底座、至少两个设置在底座上的六轴移动单元、连接在六轴移动单元末端用于夹持导管或导管配件的工装、设置在六轴移动单元上方的跟踪系统以及控制台,六轴移动单元、跟踪系统分别与控制台电连接。本发明的导管柔性装配平台和装配方法通过控制台和跟踪系统的配合对六轴移动单元的末端位置进行精确控制,从而为导管的装配提供精确定位,大大提高了导管装配过程的效率和精度。
技术研发人员:周益林,李金全,刘志川,杨红亮,魏强,房冬青,田广夺,罗全,李东,陈晨,李文宇,刘策,徐卫东,解成,陈龙,穆童
受保护的技术使用者:北京航天斯达科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!