一种数控机床的自动换刀方法、系统、装置及存储介质与流程
本发明涉及智能制造领域,尤其涉及一种数控机床的自动换刀方法、系统、装置及存储介质。
背景技术:
1、当今世界,制造强国对数控机床的发展都很重视,对发展更先进的、更高精密的、更高效的、更自动化的机床投入很大,效率、质量是先进制造技术的主体考虑方面。高速,高精密技术的运用可以显著提高效率,提高产品的档次和质量,能显著缩短生产周期和显著提高市场竞争力。
2、数控机床目前工作效率比较高,因为数控机床具有自动换刀装置,刀库中刀具类型数量齐全。为了提高数控机床的生产效率,就要提高切削速度和减少非切削时间,现在机床的切削速度已经很难有所提高了,就需要提高切削效率即减少非切削时间。现有的机床自动化换刀方法通常是直接将整个大型工业场景内自带刀库进行更换,该方案导致存储的刀具过大且耗费人力维护,导致不同产品生产强烈的依赖预先设置的先验条件,比如指定加工的工艺需要提前将刀具入库,或如若接到新的订单任务新工艺产品生产时,则需要停机更换刀具。这种强相关依赖损害了柔性加工制造小批量生产的及时性、稳定性和简单易用性,不适用于复杂多变的工业生产应用场景。
技术实现思路
1、有鉴于此,本发明实施例的目的是提供一种数控机床的自动换刀方法、系统、装置及存储介质,适用于复杂多变的工业生产应用场景,提高工作效率。
2、第一方面,本发明实施例提供了一种数控机床的自动换刀方法,应用于机器人,包括以下步骤:
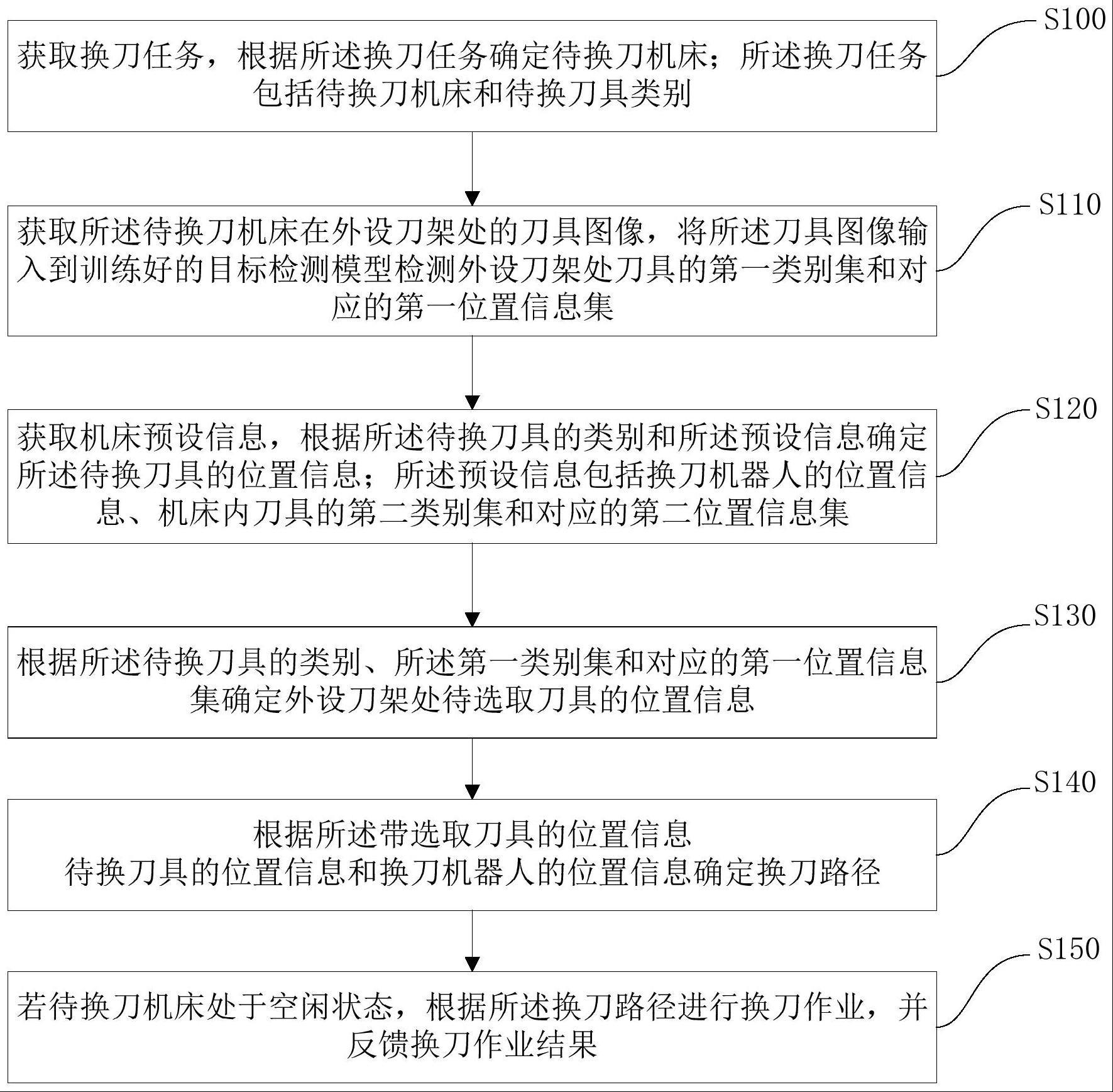
3、获取换刀任务,根据所述换刀任务确定待换刀机床;所述换刀任务包括待换刀机床和待换刀具的类别;
4、获取所述待换刀机床在外设刀架处的刀具图像,将所述刀具图像输入到训练好的目标检测模型检测外设刀架处刀具的第一类别集和对应的第一位置信息集;
5、获取机床预设信息,根据所述待换刀具的类别和所述预设信息确定所述待换刀具的位置信息;所述预设信息包括换刀机器人的位置信息、机床内刀具的第二类别集和对应的第二位置信息集;
6、根据所述待换刀具的类别、所述第一类别集和对应的第一位置信息集确定外设刀架处待选取刀具的位置信息;
7、根据所述待选取刀具的位置信息、待换刀具的位置信息和换刀机器人的位置信息确定换刀路径;
8、若待换刀机床处于空闲状态,根据所述换刀路径进行换刀作业,并反馈换刀作业结果。
9、可选地,目标检测模型训练过程如下:
10、获取第一训练数据集和第二训练数据集;所述第一训练数据集包括公开数据集,所述第二训练数据集包括多类别刀具在多种场景下的图像;
11、构建预测模型,采用所述第一训练数据集对预测模型进行训练,直至收敛;
12、采用所述第二训练数据集对收敛后的预测模型进行训练,得到目标检测模型。
13、可选地,通过以下方式获取第二训练数据集:
14、采集第一数据集,并对所述第一数据集进行标注;所述第一数据集包括多类别刀具图像、放置多类别刀具的外设刀架图像、机床背景图像;
15、从所述第一数据集中选取预设数量的待处理图像,并对所述待处理图像进行数据增强后形成第二数据集;
16、将所述第一数据集和所述第二数据集合并,形成第二训练数据集。
17、可选地,对所述待处理图像进行数据增强后形成第二数据集,具体包括:
18、从所述待处理图像中抠出目标区域,随机改变所述目标区域的图像属性;
19、将改变图像属性后的待处理图像添加背景信息,形成新数据集,并对新数据集进行标注,得到第二数据集。
20、可选地,所述根据所述待选取刀具的位置信息、待换刀具的位置信息和换刀机器人的位置信息确定换刀路径,具体包括:
21、将所述待选取刀具的位置信息转换成相对所述待换刀机床的转换位置信息;
22、根据所述换刀机器人的位置信息和所述转换位置信息确定第一路径;
23、根据所述转换位置信息和所述待换刀具的位置信息确定第二路径;
24、根据所述第一路径和所述第二路径确定换刀路径。
25、可选地,所述方法还包括:
26、若所述换刀机器人为移动机器人,换刀作业完成后,返回至预设地点。
27、第二方面,本发明实施例提供了一种数控机床的自动换刀方法,包括:
28、第一模块,用于接收换刀任务,根据所述换刀任务确定待换刀机床;所述换刀任务包括待换刀机床和待换刀具的类别;
29、第二模块,用于获取所述待换刀机床在外设刀架处的刀具图像,将所述刀具图像输入到训练好的目标检测模型检测外设刀架处刀具的第一类别集和对应的第一位置信息集;
30、第三模块,用于获取机床的预设信息,根据所述待换刀具的类别和所述预设信息确定所述待换刀具的位置信息;所述预设信息包括换刀机器人的位置信息、机床内刀具的第二类别集和对应的第二位置信息集;
31、第四模块,用于根据所述待换刀具的类别、所述第一类别集和对应的第一位置信息集确定外设刀架处待选取刀具的位置信息;
32、第五模块,用于根据所述待选取刀具的位置信息、待换刀具的位置信息和换刀机器人的位置信息确定换刀路径;
33、第六模块,用于若待换刀机床处于空闲状态,根据所述换刀路径进行换刀作业,并反馈换刀作业结果。
34、第三方面,本发明实施例提供了一种数控机床的自动换刀系统,包括若干个机床、任务调度中心和换刀机器人,所述任务调度中心连接所述机床和所述换刀机器人,其中:
35、所述机床,用于若有换刀需求,向所述任务调度中心发送换刀任务;
36、所述任务调度模块,用于接收待换刀机床发送的换刀任务,并将所述换刀任务发送给换刀机器人;接收所述换刀机器人发送的换刀作业结果;
37、所述换刀机器人,用于执行权利要求1-6任一项所述的方法。
38、第四方面,本发明实施例提供了一种数控机床的自动换刀装置,包括:
39、至少一个处理器;
40、至少一个存储器,用于存储至少一个程序;
41、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述所述的方法。
42、第五方面,本发明实施例提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,其特征在于,所述处理器可执行的程序在由处理器执行时用于执行上述所述的方法。
43、实施本发明实施例包括以下有益效果:本实施例,首先,通过获取换刀任务,根据所述换刀任务确定待换刀机床,接着,获取所述待换刀机床在外设刀架处的刀具图像,将所述刀具图像输入到训练好的目标检测模型检测外设刀架处刀具的第一类别集和对应的第一位置信息集,接着,获取机床预设信息,根据所述待换刀具的类别和所述预设信息确定所述待换刀具的位置信息,接着,根据所述待换刀具的类别、所述第一类别集和对应的第一位置信息集确定外设刀架处待选取刀具的位置信息,接着,根据所述待选取刀具的位置信息、待换刀具的位置信息和换刀机器人的位置信息确定换刀路径,若待换刀机床处于空闲状态,根据所述换刀路径进行换刀作业,并反馈换刀作业结果;通过目标检测模型识别外设刀架上的待选取刀具的类别及对应位置,以及通过机床预设信息获取待换刀具的类别及对应位置和机器人位置,根据待选取刀具的位置信息、待换刀具的位置信息和换刀机器人的位置信息确定换刀路径,在机床为空闲状态,执行换刀,外设刀架处的刀具无需固定,可根据实际应用场景确定,更换方便,可适用于复杂多变的工业生产应用场景,提高工作效率。
- 还没有人留言评论。精彩留言会获得点赞!