一种焊接机器人的承载结构的制作方法
本发明涉及焊接机器人,尤其涉及一种焊接机器人的承载结构。
背景技术:
1、随着机械加工技术的不断发展,在金属管材进行焊接时,为了提高工作效率,通常会使用焊接机器人。例如,在现代工业的管材焊接中,采用焊接机器人比手工焊接的精确度更高,根据公告号:体公开了一种焊接机器人,包括安装架,安装架上部螺栓连接有升降座,升降座端部固定安装有第一焊接机构,第一焊接机构下方设有第二焊接机构,安装架上设有用于调节第二焊接机构焊接角度的角度调节机构,安装架包括架体以及均匀设置在架体上的多个第一锁紧孔,升降座上对应设有多组第二锁紧孔。本发明通过角度调节机构来调节第二焊接机构的焊接角度,进而可以对待焊接管材的不同角度位置进行焊接,有效提高了焊接效率,还通过升降座的上下移动来调节第一焊接机构的焊接高度,进而实现对第一焊接机构的焊接高度调节,有效提高了适用范围,解决了现有焊接机器人无法对管材不同角度位置进行焊接的问题。
2、上述技术方案在对管材进行焊接时,没有设置针对管材的定位装置,在需要对管道进行对接时,不具有方便性,所以我们提出一种焊接机器人的承载结构,用于解决上述所提出的问题。
技术实现思路
1、基于背景技术存在现有的技术方案在对管材进行焊接时,没有设置针对管材的定位装置,在需要对管道进行对接时,不具有方便性的技术问题,本发明提出了一种焊接机器人的承载结构。
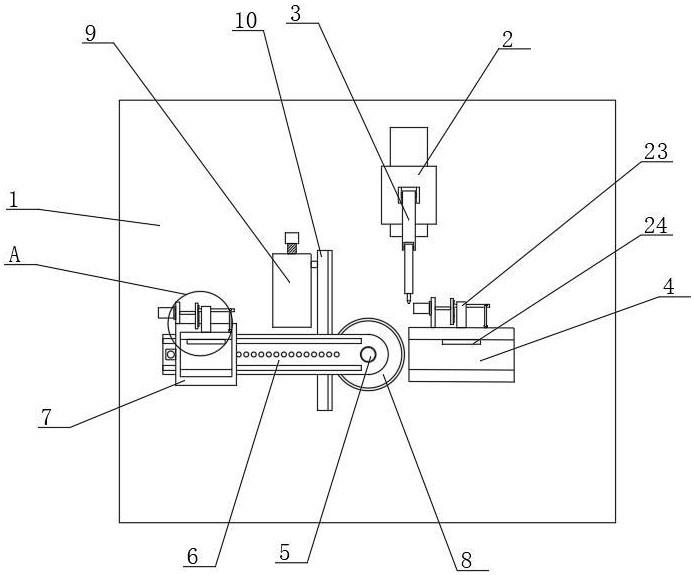
2、本发明提出的一种焊接机器人的承载结构,包括底座,所述底座的顶部安装有电动滑轨,且电动滑轨的顶部固定安装有焊接机器人,底座的顶部固定安装有u型支撑座;
3、底座的顶部安装有调节组件,且调节组件上安装有支撑轨,支撑轨的顶部滑动连接有移动板,移动板的顶部固定安装有u型固定座,u型支撑座与u型固定座上均连接有定位组件。
4、借由上述结构,可在对两个管材进行对接时,能够通过驱动调节组件带动支撑轨进行转动,以此能够对u型固定座和u型支撑座的角度进行调节,以便能够实现两个管材以需要的夹角进行对接,之后通过启动两组定位组件能够同时实现对两个管材进行夹持定位,以便在两个管材进行定位时,具有稳定性,所以在对管材进行对接时,能够保持准确性,所以具有良好的实用性。
5、优选的,所述调节组件包括传动构件、齿条、转轴和齿轮;
6、传动构件安装在底座的顶部,且转轴转动连接在底座的顶部,齿轮固定套设在转轴上,且齿条与传动构件相连接,齿条与齿轮相啮合,支撑轨固定套设在转轴上。
7、进一步的,通过驱动传动构件带动齿条进行移动,此时可在齿轮的啮合传动作用下,能够带动支撑轨进行转动,即可实现进行角度调节。
8、优选的,所述传动构件包括安装箱、螺杆和螺纹板;
9、安装箱固定安装在底座的顶部,且螺杆转动连接在安装箱的前侧内壁上,螺纹板滑动连接在安装箱内,且螺杆贯穿螺纹板并与螺纹板螺纹连接,螺杆的后端延伸至安装箱的后侧,且螺纹板的右侧延伸至安装箱的右侧并与齿条固定连接。
10、进一步的,通过转动螺杆可在与螺纹板的螺纹传动作用下,可带动齿条进行移动。
11、优选的,所述支撑轨的顶部等间距开设有多个卡槽,且移动板的左侧固定安装有固定板,固定板贯穿滑动连接有卡杆,卡杆的底端分别与多个卡槽可分离式卡装。
12、进一步的,利用卡杆与卡槽进行定位卡装,以此能够对移动板进行定位,可方便实现两个管材稳定的对接。
13、优选的,所述卡杆上套设有位于固定板下方的压缩弹簧,且压缩弹簧的顶端和底端分别与固定板的底部和卡杆固定连接。
14、进一步的,利用压缩弹簧的弹力能够对卡杆进行弹性限位,以此能够使得卡杆与对应的卡槽稳定的卡装。
15、优选的,所述定位组件包括电动推杆和连接构件;
16、u型固定座和u型支撑座内均滑动连接有夹板,且夹板的后侧固定安装有顶杆,两个顶杆的后端分别延伸至u型固定座和u型支撑座的后侧,顶杆与对应的连接构件相连接,且位于两个定位组件上的连接构件分别与u型固定座和u型支撑座相连接,移动板的后侧和u型支撑座的后侧均固定安装有承载板,电动推杆固定安装在承载板的左侧,且电动推杆与对应的连接构件相连接。
17、进一步的,通过启动电动推杆可带动连接构件进行运转,此时可使得顶杆进行移动,便可利用夹板对管材进行夹持定位。
18、优选的,所述连接构件包括转动杆、传动杆和滑动件;
19、位于两个连接构件上的转动杆分别与u型支撑座和u型固定座转动连接,且转动杆的后端与传动杆转动连接,传动杆贯穿顶杆并与顶杆滑动连接,且传动杆的左端与滑动件相连接,滑动件与电动推杆的输出轴相连接。
20、进一步的,在滑动件随着电动推杆的输出轴进行移动,可对传动杆提供拉力,使其能够进行移动,带动转动杆进行转动,此时在转动杆的拉力作用下,能够通过传动杆能够带动顶杆进行移动。
21、优选的,所述滑动件包括连接板和连接轨;
22、连接板固定安装在电动推杆的输出轴上,且连接轨固定安装在连接板的右侧,传动杆的左端与连接轨滑动连接。
23、进一步的,通过连接轨与传动杆进行滑动连接,能够持续的对传动杆提供驱动力,使得传动杆进行运动。
24、本发明的有益效果是:
25、通过转动螺杆可在螺纹传动作用下,能够带动齿条进行移动,此时在与齿轮的啮合传动作用下,能够使得转轴进行转动,即可带动支撑轨进行转动调节,以此能够对u型支撑座和u型固定座之间设定的夹角进行调节,以便能够对两个钢材以需要的角度进行设定;
26、将两个钢材分别放置在u型支撑座和u型固定座上,之后可同时启动两个电动推杆带动对应的连接板向左侧进行移动,此时能够带动传动杆进行移动,在传动杆向左侧进行移动时,可带动转动杆向左侧进行转动,此时在转动杆进行转动时,能够带动传动杆向前移动,可带动顶杆向前进行移动,利用夹板对钢材进行定位夹紧;
27、在对钢材进行夹紧后,可推动移动板进行移动,此时能够实现两个钢材进行对接,之后可释放卡杆,在压缩弹簧的弹力作用下,能够带动卡杆向下移动,使得卡杆移入对应的卡槽内,对移动板进行定位,以此能够使得两个钢材稳定的对接。
28、本发明能够根据需要对需要进行对接的两个管材进行角度调节,以此在进行焊接时,能够对两个管材稳定的定位支撑,所以具有良好的使用方便性。
技术特征:
1.一种焊接机器人的承载结构,包括底座(1),其特征在于,所述底座(1)的顶部安装有电动滑轨(2),且电动滑轨(2)的顶部固定安装有焊接机器人(3),底座(1)的顶部固定安装有u型支撑座(4);
2.根据权利要求1所述的一种焊接机器人的承载结构,其特征在于,所述调节组件包括传动构件、齿条(10)、转轴(5)和齿轮(8);
3.根据权利要求2所述的一种焊接机器人的承载结构,其特征在于,所述传动构件包括安装箱(9)、螺杆(11)和螺纹板(12);
4.根据权利要求1所述的一种焊接机器人的承载结构,其特征在于,所述支撑轨(6)的顶部等间距开设有多个卡槽,且移动板(7)的左侧固定安装有固定板(13),固定板(13)贯穿滑动连接有卡杆(14),卡杆(14)的底端分别与多个卡槽可分离式卡装。
5.根据权利要求4所述的一种焊接机器人的承载结构,其特征在于,所述卡杆(14)上套设有位于固定板(13)下方的压缩弹簧(15),且压缩弹簧(15)的顶端和底端分别与固定板(13)的底部和卡杆(14)固定连接。
6.根据权利要求1所述的一种焊接机器人的承载结构,其特征在于,所述定位组件包括电动推杆(18)和连接构件;
7.根据权利要求6所述的一种焊接机器人的承载结构,其特征在于,所述连接构件包括转动杆(23)、传动杆(21)和滑动件;
8.根据权利要求7所述的一种焊接机器人的承载结构,其特征在于,所述滑动件包括连接板(19)和连接轨(20);
技术总结
本发明属于焊接机器人技术领域,尤其是一种焊接机器人的承载结构,针对现有的技术方案在对管材进行焊接时,没有设置针对管材的定位装置,在需要对管道进行对接时,不具有方便性的问题,现提出如下方案,其包括底座,所述底座的顶部安装有电动滑轨,且电动滑轨的顶部固定安装有焊接机器人,底座的顶部固定安装有U型支撑座,底座的顶部安装有调节组件,且调节组件上安装有支撑轨,支撑轨的顶部滑动连接有移动板,移动板的顶部固定安装有U型固定座,本发明能够根据需要对需要进行对接的两个管材进行角度调节,以此在进行焊接时,能够对两个管材稳定的定位支撑,所以具有良好的使用方便性。
技术研发人员:吴建钊,谢腾辉,邵嘉成,陆逸凡,魏大海
受保护的技术使用者:库恩智能设备(常州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!