一种可查漏机器人自动化螺柱焊接设备
本发明涉及工业焊接,尤其是涉及一种可查漏机器人自动化螺柱焊接设备。
背景技术:
1、螺柱焊接是指将螺柱与基材(工件)焊接在一起,在装备制造业,焊接螺栓的应用十分广泛,螺柱焊接不仅应用于管道工程中连接止回阀、法兰或其他管件的连接,还适用于各种机械设备、船舶、车辆等工业领域的连接。螺柱焊接的精度对连接的质量和可靠性有很大的影响。如果螺柱焊接精度不够高,会导致螺栓松动、脱落或者连接不紧实,从而对设备的使用安全和性能造成影响。
2、经检索,公开号为cn214264248u的中国专利,公开了一种机器人自动化螺柱焊接设备,包括基座,所述基座的一侧固定连接有伺服电机,所述焊接打磨刷底座的一侧设有焊接打磨套管,所述焊接打磨套管的一端设有卡紧装置,所述焊接打磨套管的一端卡接有焊接打磨片,所述电机隔板的上表面固定连接有清洗液箱,所述基座的上表面固定连接有报警器。
3、该专利通过子光电开关、母光电开关和报警器的配合设置,使该机器人自动化螺柱焊接设备具备了检查漏焊报警的效果,通过焊接打磨片和清洗液箱的配合设置,使该机器人自动化螺柱焊接设备具备了高效处理焊接残留物。
4、但是上述发明存在以下不足之处:上述专利在焊接过程中,并未对基材表面进行防护,从而导致在实际焊接作业过程中,基材表面容易落有焊珠,并且后续需要进行额外的打磨、清洗作业,进而导致整体的焊接作业较为繁琐,故而存在局限性。
技术实现思路
1、本发明的目的在于提供一种可查漏机器人自动化螺柱焊接设备,以解决上述背景技术中提出的问题。
2、本发明的技术方案是:一种可查漏机器人自动化螺柱焊接设备,包括外壳体和内转筒,所述外壳体与内转筒转动连接,所述外壳体的开口处设置有同轴设置的内端筒,还包括;
3、焊接组件,所述焊接组件包括转动安装于内转筒一端内周壁上的从动内齿环,所述内转筒内周壁靠近从动内齿环的一端固定有两对端杆,且每个端杆上均滑动连接有滑框块,每个所述滑框块的底侧壁上均固定连接有安装端杆,其中两个对称分布的安装端杆的端部均固定安装有焊接枪头,另外两个所述安装端杆的端部分别固定安装有距离传感器以及微型超声波探伤头,所述从动内齿环的一侧与每个安装端杆之间均通过活动轴连接有传动推拉杆;
4、接渣组件,所述接渣组件包括多个开设于外壳体内底部上的条形通槽,每个所述安装端杆的底侧壁上均固定安装有与条形通槽滑动配合的滑杆,且多个滑杆的底端均固定有t状杆,多个所述t状杆的底侧共同固定连接有波纹耐热胶垫,且波纹耐热胶垫的外侧边缘处与外壳体底部外壁固定连接;
5、多个半球槽,多个所述半球槽等距离开设于外壳体的底部外壁上,每个所述半球槽内均活动连接有滚珠;
6、对中组件,所述对中组件设置在内端筒上。
7、优选的,所述外壳体的外周壁两侧共同固定连接有侧支架,且侧支架的顶端两侧均固定有提杆,所述侧支架靠近提杆的位置处与内端筒之间固定有连接块。
8、优选的,所述内端筒顶部与侧支架之间通过螺纹共同连接有外螺纹管,且外螺纹管的底端固定连接有活塞抵块,所述外螺纹管的顶部固定有拧盘。
9、优选的,所述内端筒的底部开设有多个与其内部相连通的支腔,且每个支腔的端部均密封滑动连接有活塞杆,每个所述活塞杆与支腔一端之间均固定有复位弹簧,且每个活塞杆的端部均固定有压块,每个所述压块的外侧壁上均固定设置有多个长圆橡胶凸条。
10、优选的,所述外螺纹管和内端筒中共同滑动连接有滑柱,且滑柱靠近底端的外周壁上开设有螺纹端,所述滑柱靠近顶端的外周壁上固定有多个拨片,所述滑柱的底端固定连接有压垫,所述内端筒的一端内周壁上固定有多个撑杆,且多个撑杆的端部共同固定有螺纹筒,所述螺纹筒与螺纹端相连接。
11、优选的,所述内转筒的内周壁靠近从动内齿环的一端固定有伺服电机,且伺服电机的输出轴固定安装有驱动齿轮二,所述驱动齿轮二与从动内齿环相啮合。
12、优选的,所述距离传感器和微型超声波探伤头均电性连接有控制器,控制器与焊接枪头以及伺服电机电性连接。
13、优选的,所述外壳体的外周壁一侧固定有驱动电机,且驱动电机的输出轴固定连接有驱动齿轮一,所述内转筒的一端内周壁固定有与驱动齿轮一相啮合的内齿端环。
14、优选的,所述外壳体的一端内周壁上固定有环形沉槽,所述内转筒的圆周外壁上转动安装有多个与环形沉槽滚动配合的转轮。
15、优选的,所述外壳体的内底部靠近距离传感器以及微型超声波探伤头的位置处均固定安装有一对挡片,其中两个所述安装端杆靠近焊接枪头的一端均固定有延伸横杆,且每个延伸横杆的两端均固定连接有多个清洁钢丝刷。
16、本发明通过改进在此提供可查漏机器人自动化螺柱焊接设备,与现有技术相比,具有如下改进及优点:
17、其一:本发明设置的距离传感器用于检测其与待焊接螺柱之间的距离,从而能够调节焊接枪头与螺柱之间的距离,从而确保焊接作业的顺利进行;而设置的微型超声波探伤头则能够对焊接的焊缝位置进行超声波探伤检测,避免出现漏焊的情况,从而确保螺柱焊接的结构牢固性;具体的,距离传感器检测与螺柱之间的距离,便可知晓焊接枪头与螺柱之间的距离,可通过控制从动内齿环的转动,配合设置的传动推拉杆即可通过滑框块来调节安装端杆和焊接枪头的距离;
18、其二:本发明当多个安装端杆向螺柱进行移动时,能够同时带动滑块沿着条形通槽进行移动,并利用多个t状杆拉动波纹耐热胶垫,使得波纹耐热胶垫能够尽可能的靠拢螺柱,并对基材进行有效的覆盖、防护,从而有效减少焊渣对基材表面产生的影响,避免后续需要花费较长时间对基材表面进行清理;
19、其三:本发明对中操作时,先转动外螺纹管,通过外螺纹管旋转推动活塞抵块向下移动,并利用液压效果,推动多个活塞杆向外侧进行延伸移动,由于液压效果的均匀性,配合设置的滚珠以及半球槽,能够使得多个压块均与螺柱表面相贴合,并使得内端筒和内转筒与螺柱处于同轴位置;利用在压块上设置多个长圆橡胶凸条,能够针对螺柱表面的螺槽,实现对螺柱的稳固夹持;当压块在对螺柱进行抵压固定后,可利用拨片继续转动滑柱,利用设置的螺纹端和螺纹筒,使得滑柱能够连同压垫向下移动,直至压垫与螺柱顶端相抵触,通过该设置可进一步提高该设备与螺柱之间的连接固定效果。
技术特征:
1.一种可查漏机器人自动化螺柱焊接设备,包括外壳体(1)和内转筒(2),所述外壳体(1)与内转筒(2)转动连接,所述外壳体(1)的开口处设置有同轴设置的内端筒(3),其特征在于,还包括;
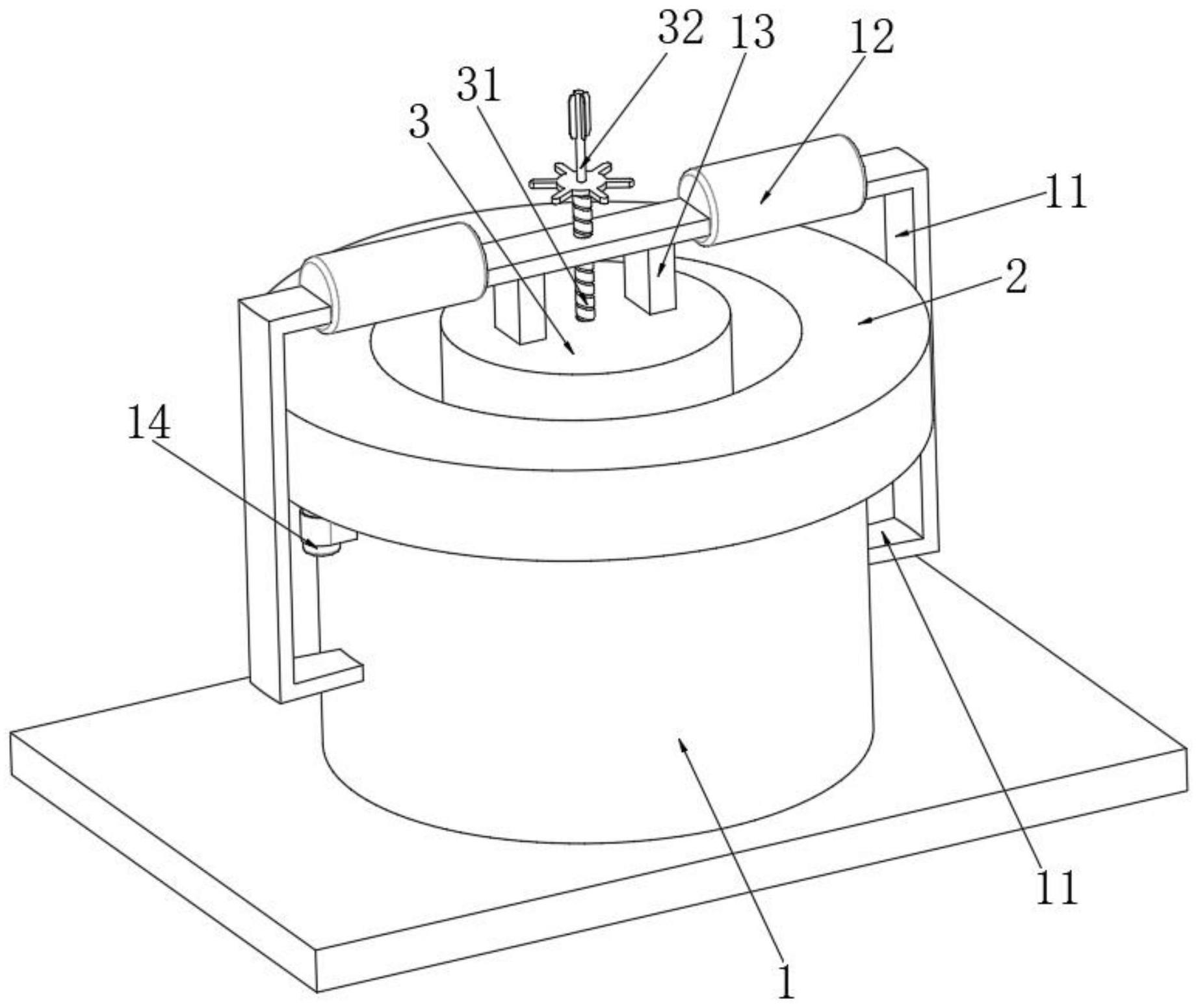
2.根据权利要求1所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述外壳体(1)的外周壁两侧共同固定连接有侧支架(11),且侧支架(11)的顶端两侧均固定有提杆(12),所述侧支架(11)靠近提杆(12)的位置处与内端筒(3)之间固定有连接块(13)。
3.根据权利要求2所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述内端筒(3)顶部与侧支架(11)之间通过螺纹共同连接有外螺纹管(31),且外螺纹管(31)的底端固定连接有活塞抵块(311),所述外螺纹管(31)的顶部固定有拧盘(312)。
4.根据权利要求3所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述内端筒(3)的底部开设有多个与其内部相连通的支腔(35),且每个支腔(35)的端部均密封滑动连接有活塞杆(351),每个所述活塞杆(351)与支腔(35)一端之间均固定有复位弹簧(352),且每个活塞杆(351)的端部均固定有压块(353),每个所述压块(353)的外侧壁上均固定设置有多个长圆橡胶凸条(354)。
5.根据权利要求3所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述外螺纹管(31)和内端筒(3)中共同滑动连接有滑柱(32),且滑柱(32)靠近底端的外周壁上开设有螺纹端(33),所述滑柱(32)靠近顶端的外周壁上固定有多个拨片(321),所述滑柱(32)的底端固定连接有压垫(34),所述内端筒(3)的一端内周壁上固定有多个撑杆(36),且多个撑杆(36)的端部共同固定有螺纹筒(361),所述螺纹筒(361)与螺纹端(33)相连接。
6.根据权利要求1所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述内转筒(2)的内周壁靠近从动内齿环(4)的一端固定有伺服电机(41),且伺服电机(41)的输出轴固定安装有驱动齿轮二(42),所述驱动齿轮二(42)与从动内齿环(4)相啮合。
7.根据权利要求1所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述距离传感器(48)和微型超声波探伤头(49)均电性连接有控制器,控制器与焊接枪头(47)以及伺服电机(41)电性连接。
8.根据权利要求1所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述外壳体(1)的外周壁一侧固定有驱动电机(14),且驱动电机(14)的输出轴固定连接有驱动齿轮一(141),所述内转筒(2)的一端内周壁固定有与驱动齿轮一(141)相啮合的内齿端环(21)。
9.根据权利要求1所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述外壳体(1)的一端内周壁上固定有环形沉槽(111),所述内转筒(2)的圆周外壁上转动安装有多个与环形沉槽(111)滚动配合的转轮(22)。
10.根据权利要求1所述的一种可查漏机器人自动化螺柱焊接设备,其特征在于:所述外壳体(1)的内底部靠近距离传感器(48)以及微型超声波探伤头(49)的位置处均固定安装有一对挡片(17),其中两个所述安装端杆(46)靠近焊接枪头(47)的一端均固定有延伸横杆(471),且每个延伸横杆(471)的两端均固定连接有多个清洁钢丝刷(472)。
技术总结
本发明公开了一种可查漏机器人自动化螺柱焊接设备,涉及工业焊接技术领域,包括外壳体和内转筒,所述外壳体与内转筒转动连接,所述外壳体的开口处设置有同轴设置的内端筒,还包括焊接组件,所述焊接组件包括转动安装于内转筒一端内周壁上的从动内齿环,所述内转筒内周壁靠近从动内齿环的一端固定有两对端杆,且每个端杆上均滑动连接有滑框块,每个所述滑框块的底侧壁上均固定连接有安装端杆。本发明当多个安装端杆向螺柱进行移动时,能够同时带动滑块沿着条形通槽进行移动,并利用多个T状杆拉动波纹耐热胶垫,使得波纹耐热胶垫能够尽可能的靠拢螺柱,并对基材进行有效的覆盖、防护,从而有效减少焊渣对基材表面产生的影响。
技术研发人员:刘慕然,周爽
受保护的技术使用者:华北电力大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!