一种点焊精准控制系统
本发明涉及一种,尤其涉及一种点焊精准控制系统。
背景技术:
1、在现代制造业中,高效、精准的加工工艺对于提高生产效率和产品质量至关重要。点焊是一种常见的连接工艺,而在点焊过程中,精准的工件定位和角度控制对焊接质量至关重要。传统的焊接过程可能受限于人工操作和单一维度的运动控制,导致难以实现高精度的焊接操作。同时,对于需要多个步骤的工件加工,例如需要旋转或翻转的工件,操作复杂性进一步增加。
技术实现思路
1、本发明的目的是要提供一种点焊精准控制系统。该系统涵盖了电焊机焊接头、工件夹持臂、工件翻转驱动机构等多个关键组件,以及相应的控制算法。通过精准的电机控制、逆向运动学算法以及闭环反馈机制,致力于实现高精度、高效的焊接操作,提升制造工艺水平。
2、为达到上述目的,本发明是按照以下技术方案实施的:
3、本发明包括人机交互单元、控制器、传感器、执行器,所述人机交互单元提供操作员输入焊接参数、工件信息、加工顺序以及监控系统状态;所述控制器执行整个控制逻辑,包括位置和角度的控制,电机控制,姿态控制;所述传感器用于实时采集系统状态信息,包括电机角度、位置、姿态;所述执行器控制电焊机焊接头、工件夹持臂、工件翻转驱动机构的运动;
4、所述点焊精准控制系统的控制方法包括以下步骤:
5、s1:初始化:系统启动时,进行传感器和执行器的初始化,设定初始参数;
6、s2:用户输入:操作员通过人机交互单元输入焊接参数、工件信息;
7、s3:电焊机焊接头控制:控制器根据人机交互单元输入的焊接位置和角度,计算电焊机焊接头的目标位置和角度;
8、s4:使用逆向运动学算法计算电焊机焊接头关节角度,控制电焊机机械臂使电焊机焊接头移动到目标位置和角度;
9、s5:工件夹持臂控制:根据人机交互单元输入的工件夹持臂位置和角度,计算目标关节角度;
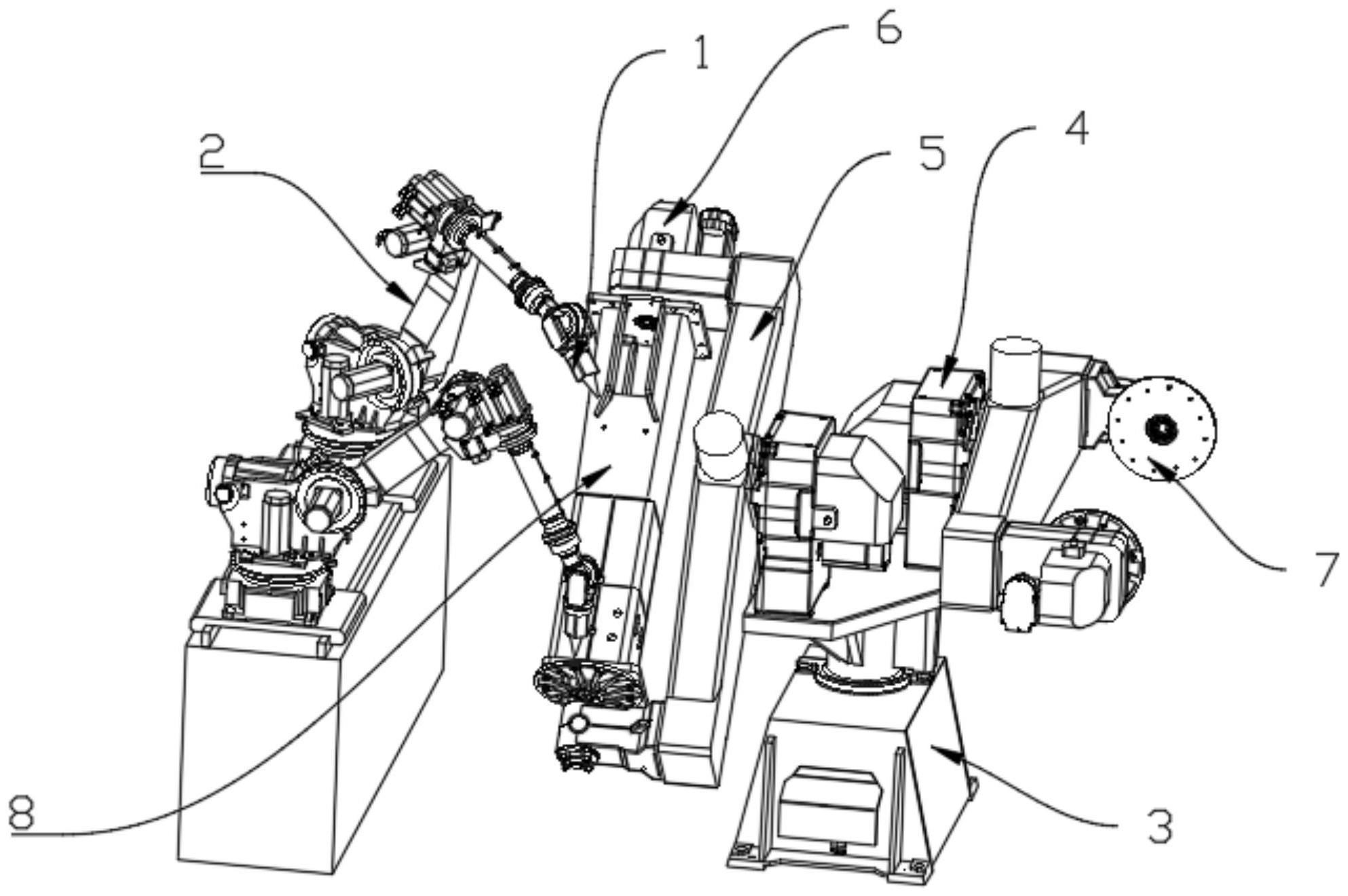
10、s6:使用逆向运动学算法计算关节角度,控制工件台水平旋转驱动机构3、工装竖向翻转驱动机构4、工件翻转驱动机构6,使工件夹持臂(5)移动到目标位置和角度;
11、s7:工件翻转驱动机构控制:根据人机交互单元输入的翻转角度,计算工件翻转驱动机构的目标角度,使用电机控制算法,驱动工件翻转驱动机构旋转,实现工件翻转;
12、s8:电机控制:根据传感器反馈,计算电机控制信号;使用pid控制算法,计算电机驱动信号,将计算得到的控制信号转化为实际的电机驱动信号;
13、s9:实时反馈与调整:传感器实时采集电机角度、位置、姿态信息,根据实际反馈信息,对控制算法进行实时调整和修正,维持系统稳定和精确。
14、所述步骤s4的逆向运动学算法为:
15、s41:定义符号:为机械臂建立坐标系,设机械臂有n个关节,关节角度分别为q1,q2,...,qn;焊接头的位置为(x,y,z),目标焊接角度为(θx,θy,θz);
16、s42:建立正向运动学模型:根据机械臂的几何运动学参数,建立正向运动学模型,将关节角度映射到电焊机焊接头的位置和姿态;
17、s43:逆向运动学求解:根据正向运动学模型的逆,从给定的电焊机焊接头位置和姿态反推出关节角度;对于位置逆运动学,使用平方根雅可比转置方法:
18、
19、
20、
21、δq=j^t*δx
22、q_new=q_current+δq
23、其中,j是雅可比矩阵,δq是关节角度的变化量,δx是末端执行器位置的变化量;
24、s44:迭代求解:通过迭代计算,不断调整关节角度,使得电焊机焊接头的位置和姿态逐渐接近目标位置和角度。
25、所述步骤s7的电机控制算法包括以下步骤:
26、s71:定义符号:设电机控制中涉及的符号包括:
27、θ:电机的角度
28、θ_desired:期望的电机角度
29、kp,ki,kd:比例、积分和微分控制器的增益
30、error:当前电机角度误差(θ_desired-θ)
31、integral:积分项,用于积分控制
32、derivative:微分项,用于微分控制
33、control_signal:控制信号,即电机驱动信号
34、s72:pid控制算法:使用pid控制器调节电机角度,使其接近期望的角度;
35、error=θ_desired-θ
36、integral=integral+error
37、derivative=error-previous_error
38、control_signal=kp*error+ki*integral+kd*derivative
39、其中,kp、ki和kd是pid控制器的增益;
40、s73:控制信号转换:将计算得到的控制信号转换为实际的电机驱动信号;。
41、s74:实时更新控制指令:在系统的控制循环中,不断计算更新控制指令,以实现电机的闭环控制。
42、本发明的有益效果是:
43、本发明是一种点焊精准控制系统,与现有技术相比,本发明具有如下技术效果:
44、高精度焊接操作:本发明的系统通过逆向运动学算法,将用户输入的焊接位置和角度转化为电机关节运动指令,实现高精度的电焊机焊接头定位。这确保了焊接点的精准位置,提升了焊接质量。
45、多维度运动控制:通过逆向运动学算法,本发明不仅实现了位置的控制,还实现了工件夹持臂和工件翻转驱动机构的多维度控制。这使得工件在不同维度上的移动、旋转和翻转操作成为可能,从而满足复杂焊接需求。
46、闭环反馈优化:本发明的系统采用传感器实时反馈机制,持续监测电机角度、位置和姿态等信息。这使得本发明能够实时调整控制算法,以应对外部干扰或系统偏差,确保焊接过程的稳定性和精确性。
47、提升生产效率:通过自动化的多维度控制和闭环反馈机制,本发明的系统能够在更短的时间内完成复杂的焊接操作。这将大大提高生产效率,减少人工干预所需的时间。
48、多工件同时或依次加工:本发明的系统设计允许多组工件夹持臂并行操作,实现多个待加工工件同时或依次加工。这在批量生产中具有重要意义,进一步提升了生产效率。
49、综上所述,本发明的点焊精准控制系统不仅改善了传统焊接工艺的局限性,还提供了高精度、高效率的解决方案,将为制造业带来显著的技术效益和竞争优势。
技术特征:
1.一种点焊精准控制系统,其特征在于:包括人机交互单元、控制器、传感器、执行器,所述人机交互单元提供操作员输入焊接参数、工件信息、加工顺序以及监控系统状态;所述控制器执行整个控制逻辑,包括位置和角度的控制,电机控制,姿态控制;所述传感器用于实时采集系统状态信息,包括电机角度、位置、姿态;所述执行器控制电焊机焊接头、工件夹持臂、工件翻转驱动机构的运动;
2.根据权利要求1所述的点焊精准控制系统,其特征在于:所述步骤s4的逆向运动学算法为:
3.根据权利要求1所述的点焊精准控制系统,其特征在于:所述步骤s7的电机控制算法包括以下步骤:
技术总结
本发明公开了一种点焊精准控制系统,包括人机交互单元、控制器、传感器、执行器,所述人机交互单元提供操作员输入焊接参数、工件信息、加工顺序以及监控系统状态;所述控制器执行整个控制逻辑,包括位置和角度的控制,电机控制,姿态控制;所述传感器用于实时采集系统状态信息,包括电机角度、位置、姿态;所述执行器控制电焊机焊接头、工件夹持臂、工件翻转驱动机构的运动;本发明的点焊精准控制系统不仅改善了传统焊接工艺的局限性,还提供了高精度、高效率的解决方案,将为制造业带来显著的技术效益和竞争优势。
技术研发人员:蒋德平,姚宗湘,李峰,尹立孟,王刚,周杨,张焱,刘俊,苟毅
受保护的技术使用者:重庆科技学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!