一种钢轨焊缝粗打磨工位机器人及其打磨工艺的制作方法
本技术涉及工件打磨技术的领域,尤其是涉及一种钢轨焊缝粗打磨工位机器人及其打磨工艺。
背景技术:
1、钢轨是各类轨道的主要组成部件。它的功用在于引导车轮的前进,承受车轮的巨大压力,并将压力传递到轨枕上。钢轨的长度可以根据需要进行焊接定制,以适应不同的轨道输送设备需求。
2、目前,在进行钢轨的焊接作业时,常需要对钢轨焊缝进行打磨作业。由于钢轨及焊缝形态具有其特殊性,即钢轨全轮廓为复杂异形曲面,同时又存在钢轨外观尺寸有不同误差、焊接时存在错边、加工相容度不高等问题。为达到焊缝区域与母材平顺过渡的质量要求,目前焊缝粗打磨作业上,通常采用数控铣床以及人工手持式砂轮机打磨相结合的打磨方案。虽然,人工辅助打磨的方式能够有效的提高钢轨焊缝的打磨质量,但增设的人工打磨工序会大幅延长钢轨焊缝的打磨周期,使得钢轨焊缝的打磨效率较低。
技术实现思路
1、为了改善钢轨焊缝打磨效率较低的问题,本技术提供一种钢轨焊缝粗打磨工位机器人。
2、本技术提供的一种钢轨焊缝粗打磨工位机器人采用如下的技术方案:
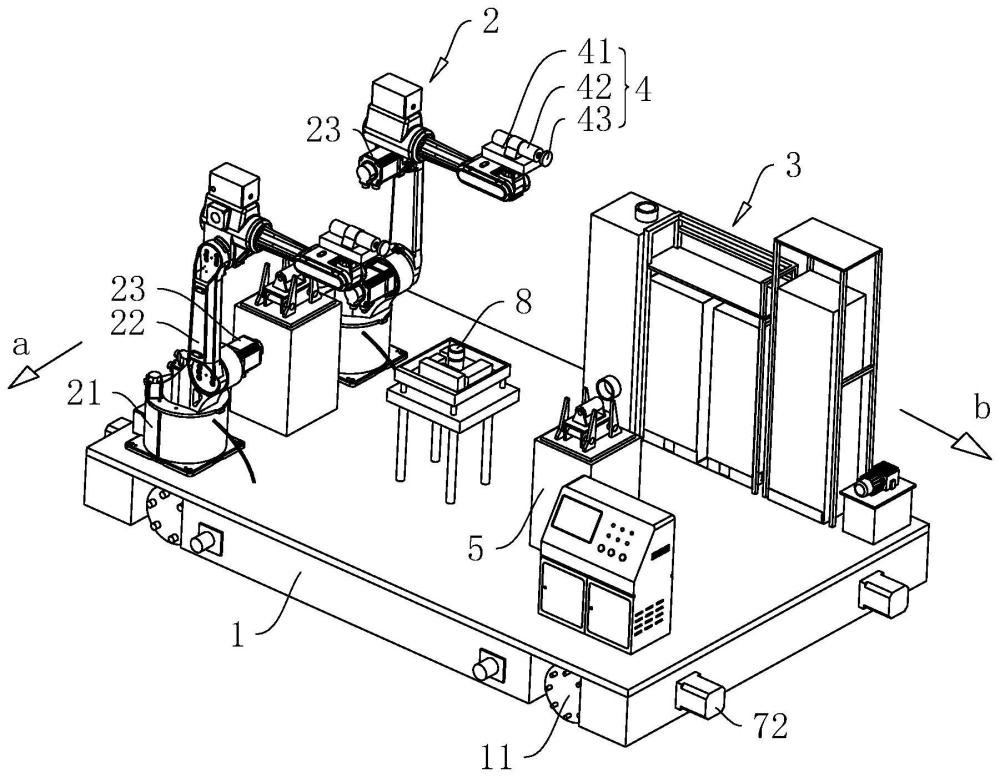
3、一种钢轨焊缝粗打磨工位机器人,包括基础平台,所述基础平台上设置有:两组多关节机械手,所述两组多关节机械手沿第一方向排列,每组包括至少一个多关节机械手,所述多关节机械手的末端设置有打磨头;夹紧装置,位于两组多关节机械手之间,用于对钢轨进行夹持,使钢轨在两组多关节机械手之间沿第二方向延伸,所述第二方向与所述第一方向相交;控制系统,用于调节多关节机械手的转动姿态、控制所述打磨头的打磨压力。
4、通过采用上述技术方案,设置的夹紧装置先将钢轨夹持定位于基础平台上,而后通过控制系统进行多关节机械手的姿态调节,使得电主轴上的刀具沿钢轨的焊缝轮廓轨迹进行焊缝的高效精细打磨,多组打磨头的共同作业下,于钢轨的两侧同步进行焊缝的打磨作业,既提高钢轨焊缝打磨质量和打磨效率的同时,还使得批量钢轨的焊缝打磨质量较高且较为统一。
5、可选的,所述打磨头包括设置在多关节机械手末端的柔性力控法兰、设置在力控法兰远离多关节机械手一端的电主轴、可拆卸连接于电主轴输出端的刀具;所述柔性力控法兰与控制系统电连接。
6、通过采用上述技术方案,在控制系统控制打磨头进行钢轨的打磨作业时,控制系统能够通过控制柔性力控法兰以及多关节机械手,而实现恒定柔性的打磨压力控制,实现打磨压力的调节,从而使得钢轨焊缝的打磨质量大幅提高。
7、可选的,所述夹紧装置包括:支撑台,设置于所述基础平台上;导料辊、转动设置于支撑台上,所述导料辊圆周面用于支撑钢轨;夹持机构,设置在所述支撑台上,用于对钢轨进行夹紧和松放。
8、通过采用上述技术方案,当钢轨受外部输送装置的输送而送入基础平台后,通过导料辊对钢轨进行支撑,以使钢轨于基础平台上进行平滑移动;当钢轨移动至适宜位置后,通过夹持机构对钢轨进行夹紧定位,以便打磨头对钢轨的焊缝进行打磨处理。
9、可选的,所述夹持机构包括:夹持臂,于支撑台上沿第一方向间隔设置有两个;驱动件,设置在支撑台上,用于驱使两夹持臂移动,以使两夹持臂对钢轨进行夹紧和松放。
10、通过采用上述技术方案,当钢轨上的焊缝移动至打磨工位处后,设置的驱动件驱使两夹持臂移动,使得两夹持臂将钢轨夹持于当前位置处,即可方便打磨头对钢轨进行稳定打磨。
11、可选的,所述夹持机构包括:安装座,于支撑台上沿第一方向活动间隔设置有两个;定位座,设置于安装座上,其一端面与所述安装座弹性连接,相对端面朝向另一安装座,且相对端面用于按压钢轨侧面;定位臂,一端固设有用于供定位臂与定位座转动连接的转轴,相对端伸出定位座并用于贴合钢轨外轮廓上表面;调节组件,设置于支撑台上,用于驱使两安装座相互靠近和相互远离;锁定组件,用于对所述定位臂的转动进行锁定或放松。
12、通过采用上述技术方案,当钢轨受外部输送装置的输送而于基础平台上移动时,定位臂搭设于钢轨外轮廓的上表面,定位座贴合于钢轨侧壁,使得钢轨周侧防脱限制于夹紧装置中;而当钢轨移动至指定位置后,通过调节机构驱使两安装座相互靠近,使得安装座与相邻近的定位座相互靠拢抵紧,而后锁定组件对定位臂进行锁定,使得定位臂稳定的贴合于钢轨上,使得钢轨难以发生上下位移;而由于定位臂难以发生移动,使得定位座难以发生移动,从而使得钢轨侧壁受定位座稳定限位,使得钢轨难以发生横向晃动,从而实现钢轨的稳定锁止。
13、可选的,所述锁定组件包括:上按压头,设置在安装座上,用于按压定位臂上端面;侧支撑板,设置在安装座上,用于对定位臂靠近定位座的一端面进行支撑。
14、通过采用上述技术方案,设置的上按压定位臂上端面,而设置的侧支撑板对定位臂靠近定位座的一端面进行支撑,同时定位臂下端面贴合于钢轨的表面,使得定位臂受多角度的限制而难以发生移动,从而实现定位臂的稳定锁止。
15、可选的,所述安装座邻近定位座的侧面开设有半圆槽,所述侧支撑板为转动设置在半圆槽中的半圆板,所述侧支撑板的圆弧面与半圆槽内壁滑动贴合,所述侧支撑板的一水平端面用于支撑定位臂靠近定位座的一端面。
16、通过采用上述技术方案,当两个安装座受驱动而相互靠近时,安装座与其上的定位座相互聚拢,然后定位座上的定位臂逐渐靠近侧支撑板,直至定位臂的端面抵触侧支撑板,而由于侧支撑板远离定位臂的一端始终与半圆槽内壁贴合,使得侧支撑板在对定位臂的端面进行稳定承载限位。
17、可选的,所述转轴周侧固定有定位环,所述定位环外周面开设有若干定位槽,所述侧支撑板表面设置有电磁铁,所述安装座表面可升降滑移的设置有若干定位条;所述电磁铁能够受控制系统的控制而进行磁力调整,所述电磁铁能够磁吸定位条,并使定位条的一端插入所述定位槽。
18、通过采用上述技术方案,当侧支撑板抵触定位臂后,通过电磁铁能够磁吸定位条,并使定位条的一端插入定位槽中,从而使得定位环难以发生转动,进一步增强定位臂的锁止稳定性。
19、可选的,所述基础平台底部设置有多个驱动轮,所述基础平台设置有用于驱使所述驱动轮转动的驱动件。
20、通过采用上述技术方案,设置的驱动件能够驱使驱动轮转动,从而使得基础平台能够在厂区内进行位置调整。
21、本技术第二方面提供的一种钢轨焊缝粗打磨工艺采用如下的技术方案:
22、一种钢轨焊缝粗打磨工艺,基于第一方面所述的任一种钢轨焊缝粗打磨工位机器人,包括:通过导入夹紧组件对送入基础平台的钢轨进行夹持定位;确定钢轨上的焊缝的位置;通过控制系统控制多关节机械手进行姿态调整,将以使多关节机械手末端的打磨头移动至钢轨的焊缝处;通过控制系统控制打磨头对钢轨的焊缝进行打磨。
23、综上所述,本技术包括以下至少一种有益技术效果:
24、1.设置的夹紧装置先将钢轨夹持定位于基础平台上,而后通过控制系统进行多关节机械手的姿态调节,使得电主轴上的刀具沿钢轨的焊缝轮廓轨迹进行焊缝的高效精细打磨,多组打磨头的共同作业下,于钢轨的两侧同步进行焊缝的打磨作业,既提高钢轨焊缝打磨质量的同时,还使得批量钢轨的焊缝打磨质量较高且较为统一;
25、2.在控制系统控制打磨头进行钢轨的打磨作业时,控制系统能够通过控制柔性力控法兰以及多关节机械手,而实现恒定柔性的打磨压力控制,实现打磨压力的调节,从而使得钢轨焊缝的打磨质量大幅提高;
26、3.通过调节机构驱使两安装座相互靠近,使得安装座与相邻近的定位座相互靠拢抵紧,而后锁定组件对定位臂进行锁定,使得定位臂稳定的贴合于钢轨上,使得钢轨难以发生上下位移;而由于定位臂难以发生移动,使得定位座难以发生移动,从而使得钢轨侧壁受定位座稳定限位,使得钢轨难以发生横向晃动,从而实现钢轨的稳定锁止。
- 还没有人留言评论。精彩留言会获得点赞!