焊接系统、方法以及电子设备与流程
本发明实施例涉及机器人,特别涉及一种焊接系统、方法以及电子设备。
背景技术:
1、随着新能源的快速发展,储能技术逐渐成为各个领域关注的热点,储能箱作为其中的重要装置,提高了能源的可靠性和稳定性,减少了电网灾害发生的概率,降低能源的传输损耗,在能源领域发挥着重要的作用。目前大型的储能箱焊接大多是由人工进行焊接,在板材与板材拼接处,焊缝轨迹多为长直焊缝,在板材与框架的拼接处,焊缝多为波纹焊缝。
2、然而,由于需要焊接的储能箱的板材形状过大,容易产生形变,因此采用传统的人工焊接会导致焊接质量差、焊接效率低,因此焊接过后的储能箱不满足生产标准,同时还会导致焊接成本过高的问题。
技术实现思路
1、本公开实施例的目的在于提供一种焊接系统、方法以及电子设备,提高储能箱的焊接质量,加快储能箱的焊接效率,使得焊接过后的储能箱满足生产标准,同时降低焊接成本。
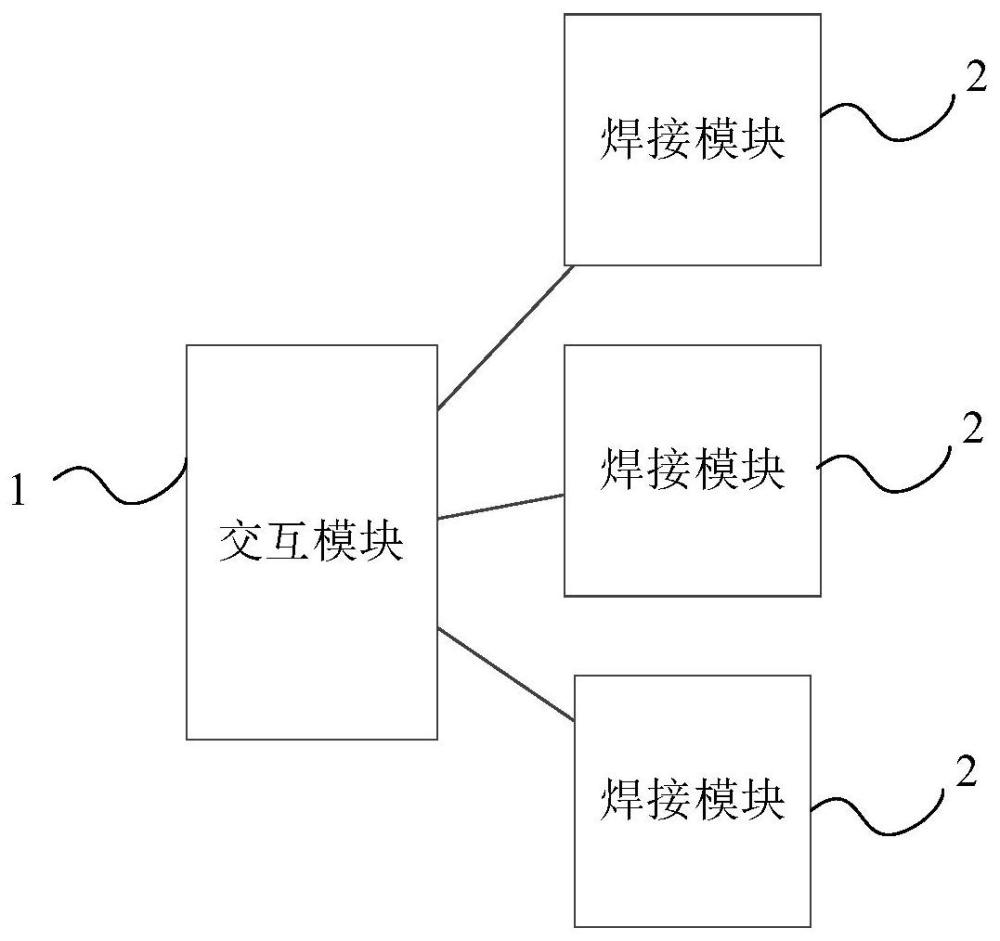
2、根据本公开一些实施例,本公开的实施例一方面提供一种焊接系统、方法以及电子设备,应用于储能箱的焊接,包括:交互模块,被配置为,基于待焊接储能箱的信息特征,设置焊接工艺参数,其中,所述信息特征用于表征所述待焊接储能箱的焊缝中心点位以及焊接路径与所述检测模块;多个焊接模块,多个所述焊接模块分布于所述待焊接储能箱的四周,并与所述交互模块通信连接,被配置为,响应于所述焊接工艺参数,对所述待焊接储能箱进行焊接操作。
3、在一些实施例中,所述焊接模块包括:机器人;焊机,与所述机器人通信连接,所述机器人响应于所述焊接工艺参数,控制所述焊机运行以焊接所述待焊接储能箱;导轨,设置于所述机器人的底部,所述机器人以及所述焊机响应于所述焊接工艺参数在所述导轨上移动。
4、在一些实施例中,所述焊接工艺参数包括:待焊接储能箱的箱型以及需要工作的所述机器人序号。
5、在一些实施例中,所述待焊接储能箱包括相对的两个侧板,且还包括相对的前门板和后门板;其中,每个所述侧板的一侧设置有4个所述机器人,所述前门板和所述后门板分别设置有1个所述机器人。
6、在一些实施例中,所述焊接系统还包括:机器人控制器,用于发送初始化指令,对所述机器人、所述焊机以及所述导轨进行初始化操作。
7、在一些实施例中,所述焊接模块还包括:碰撞检测传感器,与所述机器人固定连接,当所述机器人发生碰撞时输出警报到所述交互模块。
8、在一些实施例中,所述交互模块还被配置为:监视并显示所述机器人的系统状态,所述系统状态包括运行、故障、操作模式以及是否在预设位置;监视并显示所述焊机的焊接参数,所述焊接参数包括电压或者电流中的至少一者。
9、在一些实施例中,所述交互模块还被配置为,控制每一所述焊接模块相互独立工作。
10、根据本公开一些实施例,本公开实施例另一方面还提供一种焊接方法包括:提供交互模块,所述交互模块被配置为,基于待焊接储能箱的信息特征,设置焊接工艺参数,其中,所述信息特征用于表征所述待焊接储能箱的焊缝中心点位以及焊接路径与所述检测模块;提供多个焊接模块,多个所述焊接模块分布于所述待焊接储能箱的四周,并与所述交互模块通信连接,被配置为,响应于所述焊接工艺参数,对所述待焊接储能箱进行焊接操作。
11、根据本公开一些实施例,本公开的实施例一方面还提供一种电子设备包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述所述的焊接方法。
12、本公开实施例提供的技术方案至少具有以下优点:通过设置交互模块,并基于待焊接储能箱的信息特征,设置焊接工艺参数,然后设置于交互模块通信连接的多个焊接模块,从而可以通过人机交互的方式,只要输入焊接工艺参数,即可通过多个焊接模块对待焊接产品进行焊接,其次,本公开可以适用于不同的待焊接产品,在实际工业生产中利用率更高,满足多种焊接需求。
技术特征:
1.一种焊接系统,用于储能箱的焊接,其特征在于,包括:
2.根据权利要求1所述的焊接系统,所述焊接模块(2)包括:
3.根据权利要求2所述的焊接系统,其特征在于,所述焊接工艺参数包括:待焊接储能箱(3)的箱型以及需要工作的所述机器人(21)序号。
4.根据权利要求2所述的焊接系统,其特征在于,所述待焊接储能箱(3)包括相对的两个侧板,且还包括相对的前门板和后门板;其中,每个所述侧板的一侧设置有4个所述机器人(21),所述前门板和所述后门板分别设置有1个所述机器人(21)。
5.根据权利要求2所述的焊接系统,其特征在于,所述焊接系统还包括:
6.根据权利要求2所述的焊接系统,其特征在于,所述焊接模块还包括:
7.根据权利要求2所述的焊接系统,其特征在于,所述交互模块还被配置为:监视并显示所述机器人(21)的系统状态,所述系统状态包括运行、故障、操作模式以及是否在预设位置;监视并显示所述焊机(22)的焊接参数,所述焊接参数包括电压或者电流中的至少一者。
8.根据权利要求1所述的焊接系统,其特征在于,所述交互模块还被配置为,控制每一所述焊接模块(2)相互独立工作。
9.一种焊接方法,其特征在于,包括:
10.一种电子设备,其特征在于,包括:
技术总结
本申请实施例涉及机器人技术领域,公开了一种焊接系统、方法和电子设备,应用于储能箱的焊接,该系统包括:交互模块,被配置为,基于待焊接储能箱的信息特征,设置焊接工艺参数,其中,所述信息特征用于表征所述待焊接储能箱的焊缝中心点位以及焊接路径与所述检测模块;多个焊接模块,多个所述焊接模块分布于所述待焊接储能箱的四周,并与所述交互模块通信连接,被配置为,响应于所述焊接工艺参数,对所述待焊接储能箱进行焊接操作。本申请通过采用人机交互的方式,只要输入焊接工艺参数,即可通过多个焊接模块对待焊接产品进行焊接,其次,本公开可以适用于不同的待焊接产品,在实际工业生产中利用率更高,满足多种焊接需求。
技术研发人员:毛志鑫,史青松,夏伟东,张敏梁,陈伟
受保护的技术使用者:上海新时达机器人有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!