一种基于激光定位切割系统的制作方法
本发明涉及激光切割,更具体地说,它涉及一种基于激光定位切割系统。
背景技术:
1、激光切割机对板材进行切割时一般通过摄像头对切割部位进行监控,以便于对切割部位进行精确定位,同时方便对切割头的位置进行控制,传统的切割机的切割头的监控一般使用固定的摄像头对其进行监控,摄像头一般在固定的高度以固定的角度对切割头进行监控,工作人员无法通过摄像头在不同的高度以不同的倾斜视角对摄像头进行监控,从而导致对切割头的定位切割位置精度不高,而在每切割一个花型就要提取样本并处理一次,即每次只能切割一个样版。一旦幅面存在多个样版,其工作方式就是切完一个样版后再切另一个样版,并且只有一个工作台,每次都是需要一版切结束才能进行下一板切割,如此下来激光头重复行程必然会大幅增加,还会影响物料切割精度工作效率相对较低。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种基于激光定位切割系统。
2、为实现上述目的,本发明提供了如下技术方案:一种基于激光定位切割系统,包括运输加工机构,便于物料在进行激光切割过程中,对物件进行运输加工;
3、交替机构,便于在物料加工的过程中,可对物料进行换位加工;
4、装夹机构,便于在物料加工的过程中,对物料的夹持与加固;
5、定位控制切割模块,用于对激光切割操作和定位进行控制;
6、所述交替机构设置于运输加工机构的中段;
7、所述装夹机构设置于运输加工机构的内部。
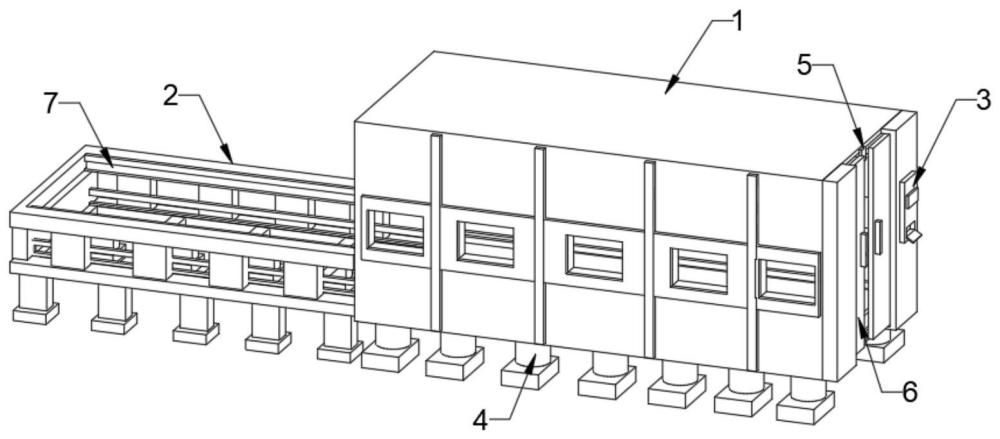
8、本发明进一步设置为:所述运输加工机构包括有加工箱、底座、运输台、滑轨、显示控制端、两个工作台,其中:
9、所述加工箱安装于底座的上端,所述运输台位于加工箱的一侧,且运输台的一端伸入加工箱内,所述显示控制端安装于加工箱的前端;
10、所述滑轨固定安装于运输台的两侧内壁,所述工作台分别位于运输台的两侧,且工作台与滑轨连接;
11、两个所述工作台之间安装有交替机构,所述交替机构与显示控制端电连接。
12、本发明进一步设置为:所述运输加工机构还包括有操作门、闭合感应器、机械手臂、激光切割器、激光探测头,其中:
13、所述操作门安装于加工箱的前端,所述闭合感应器安装于操作门的中段;
14、所述机械手臂安装于工作台的侧端,所述激光探测头安装于机械手臂的前端,所述激光切割器安装于激光探测头的前端;
15、所述机械手臂、激光探测头、激光切割器以及闭合感应器均与显示控制端电连接。
16、本发明进一步设置为:所述装夹机构包括分布于工作台上的若干置物槽、以及固定于工作台下侧的双向液缸,所述置物槽内设置有两个置物夹板,两个所述置物夹板相背的一侧和置物槽的内壁之间连接有活塞杆,所述活塞杆内壁均与双向液缸管道连接。
17、本发明进一步设置为:所述双向液缸与显示控制端电连接,所述转接管呈网状连接分布于每个置物槽的下端。
18、本发明进一步设置为:所述交替机构包括有直线导轨、齿轮组、无杆气缸、齿条、横梁,其中:
19、所述齿轮组安装于两组工作台之间,所述直线导轨安装于齿轮组的上下两侧,所述齿条安装于工作台的两侧的下端,所述横梁安装于工作台的表面,所述无杆气缸安装于工作台的横梁上,所述齿轮组与齿条啮合连接;
20、所述无杆气缸的表面开设有气孔;
21、所述无杆气缸与显示控制端电连接。
22、本发明进一步设置为:所述定位控制切割模块包括有定位模块、运动控制切割模块、分析模块,其中:
23、所述分析模块与运动控制切割模块电连接,所述定位模块与分析模块电连接;
24、所述定位模块用于将激光探测头探测到的数据转为定位信息,并将定位信息传输给分析模块;
25、所述分析模块用于对定位信息进行分析,并将分析出的定位数据传输至显示控制端;
26、所述运动控制切割模块用于对接收到的分析指令进行控制,并控制机械手臂进行工作。
27、本发明进一步设置为:所述激光探测头的内部包括有标记单元、拍照单元、图像单元,其中:
28、所述图像单元与拍照单元电连接,所述拍照单元用于对物料的拍照,并将拍照数据传输到图像单元;
29、所述图像单元用于接收拍照单元传输的数据,并将数据传输至显示控制端;
30、所述图像单元用于将拍照数据传输至显示控制端以及标记单元;
31、所述标记单元对拍照数据进行切割标记、并将标记信息传输给运动控制切割模块;
32、所述运动控制切割模块控制机械手臂进行切割作业。
33、本发明的优点是:1、通过装夹机构带动置物夹板向前移动,将放置在置物槽内的物料夹紧,通过上述步骤,从而使得激光切割在切割过程中,可以将物料加固锁紧。
34、2、通过交替机构带动工作台沿着直线导轨向右移动,同时工作台下端的齿条带动齿轮组转动,齿轮组转动带动上方的齿条向左移动,从而带动上方的工作台向左移动,从而来完成工作台的交替互动,来提高激光切割的速率。
35、3、通过定位控制切割模块并将定位数据传输至运动控制切割模块,便于获取垂直视角,及时监控切割情况每个物料切割前进行单独定位,更准确。
技术特征:
1.一种基于激光定位切割系统,其特征在于:包括运输加工机构,便于物料在进行激光切割过程中,对物件进行运输加工;
2.根据权利要求1所述的一种基于激光定位切割系统,其特征在于:所述运输加工机构包括有加工箱(1)、底座(4)、运输台(2)、滑轨(7)、显示控制端(3)、两个工作台(8),其中:
3.根据权利要求2所述的一种基于激光定位切割系统,其特征在于:所述运输加工机构还包括有操作门(6)、闭合感应器(5)、机械手臂(12)、激光切割器(13)、激光探测头(20),其中:
4.根据权利要求1所述的一种基于激光定位切割系统,其特征在于:所述装夹机构包括分布于工作台(8)上的若干置物槽(9)、以及固定于工作台(8)下侧的双向液缸(10),所述置物槽(9)内设置有两个置物夹板(15),两个所述置物夹板(15)相背的一侧和置物槽(9)的内壁之间连接有活塞杆(14),所述活塞杆(14)内壁均与双向液缸(10)管道连接。
5.根据权利要求1所述的一种基于激光定位切割系统,其特征在于:所述双向液缸(10)与显示控制端(3)电连接,所述转接管呈网状连接分布于每个置物槽(9)的下端。
6.根据权利要求1所述的一种基于激光定位切割系统,其特征在于:所述交替机构包括有直线导轨(18)、齿轮组(17)、无杆气缸(19)、齿条(16)、横梁(22),其中:
7.根据权利要求1-6所述的一种基于激光定位切割系统,其特征在于:所述定位控制切割模块包括有定位模块、运动控制切割模块、分析模块,其中:
8.根据权利要求7所述的一种基于激光定位切割系统,其特征在于:所述激光探测头(20)的内部包括有标记单元、拍照单元、图像单元,其中:
技术总结
本发明公开了一种基于激光定位切割系统基于激光定位切割系统,包括运输加工机构,便于物料在进行激光切割过程中,对物件进行运输加工,交替机构,便于在物料加工的过程中,可对物料进行换位加工,装夹机构,便于在物料加工的过程中,对物料的夹持与加固,所述交替机构设置于运输加工机构的中段,所述装夹机构设置于运输加工机构的内部,定位控制切割模块,用于对激光切割操作和定位进行控制,所述定位控制切割模块包括有定位模块、运动控制切割模块、分析模块,该装置解决了监控的精确度不高,导致切割的定位精度不高,达到了将物料夹紧,能进行工位交替,节省了上料时间,还可以很精准的对物料进行定位切割。
技术研发人员:许建明,刘嘉,马再富
受保护的技术使用者:常熟市龙腾辽鞍机械有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!