一种无人机自主更换单灯控制器智能装置及工作方法与流程
本发明涉及城市照明,尤其涉及一种无人机自主更换单灯控制器智能装置及工作方法。
背景技术:
1、近年来,单灯控制器在城市道路照明中得到广泛的应用,实现了城市照明的智能化和精细化管理,二次节能的效果也非常明显。
2、单灯控制器有三种安装形式:
3、1)采用nema或zhaga标准的接口,将单灯控制器旋插安装在路灯灯具顶部;
4、2)采用接线方式,将单灯控制器安装在路灯灯具内部;
5、3)采用接线方式,将单灯控制器安装在路灯灯杆底部的检修口内。
6、目前,在灯头上旋插安装的单灯控制器只能由具备高空作业证和电工证的工人利用登高作业车进行更换,而城市路灯量多面广,这种维护方式的成本高、效率低,也具有安全隐患。
7、现有技术中,如2023年3月14日公布的一篇专利号为202211694137.2的发明专利,公开了一种基于无人机平台的单灯控制器空中自动化更换装置,包括无人机、机械臂和控制器拆装机构,所述机械臂搭设在无人机上,控制器拆装机构固定在机械臂的端部;所述控制器拆装机构包括旋转电机、机械爪壳体、机械爪和用于在更换控制器时进行视觉定位的摄像组件;机械爪壳体固定在旋转电机的驱动端,摄像组件固定在机械爪壳体上,在机械爪壳体靠近控制器的一侧设置机械爪电机。此结构的自动化更换装置由于在更换单灯的过程中一直是悬飞状态的原因,下方机械结构在动作时必然会有轻微的震动,导致飞行器飞行时的波动,从而也会带动下方结构的不稳定,这样就会带来更大的负反馈,导致效率和稳定性的下降,当遭遇横风时,可能会导致不能正常工作。
技术实现思路
1、本发明针对以上问题,提供了一种提高更换单灯控制器的效率、降低成本、提高安全性以及保证工作的稳定性的一种无人机自主更换单灯控制器智能装置及工作方法。
2、本发明的技术方案是:
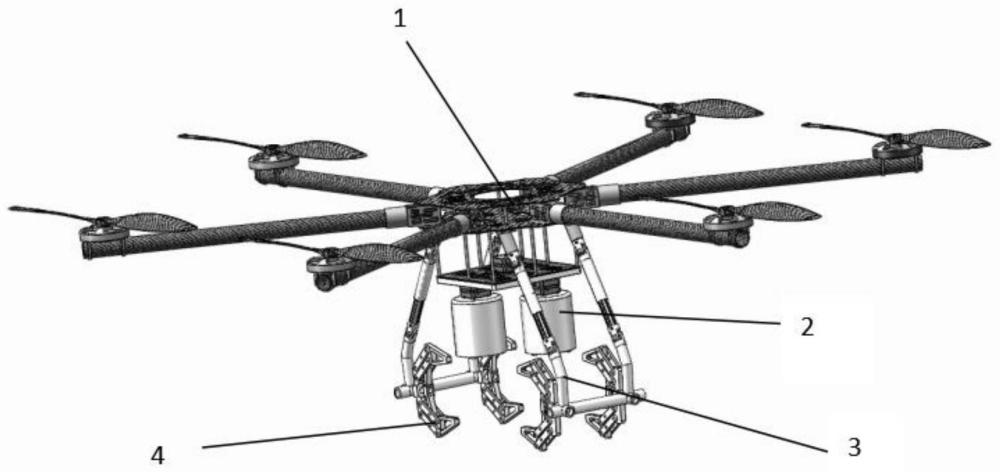
3、一种无人机自主更换单灯控制器智能装置,包括:
4、拆装机构,包括单灯夹具;所述单灯夹具内设有可旋转的对接座;所述对接座上设有与单灯控制器适配的卡腔,通过所述对接座的旋转将单灯控制器与控制器插座解锁;
5、伸缩机构,设有一对,对称设置在无人机的下方;包括无人机支架和一对万向伸缩杆;所述万向伸缩杆的顶部与无人机的下方连接,底部与无人机支架连接;通过所述伸缩机构的伸缩控制无人机支架与单灯夹具之间的间距;
6、握手机构,至少设有两只,对称设置在相应所述无人机支架的内侧;其包括:
7、夹手底座,可调节固定设置在所述无人机支架上;
8、夹子长支架,设有一对,一对所述夹子长支架的尾端分别与夹手底座铰接;
9、夹手伸缩节,位于一对所述夹子长支架之间,两端分别通过夹手短支架与所述夹子长支架的中部铰接;
10、夹手夹子,设有一对,分别与对应的所述夹子长支架前端铰接;
11、握手气缸,其缸体固定设置在所述无人机支架上,其活塞杆通过所述夹手底座与夹手伸缩节固定连接。
12、具体的,所述无人机包括内置的:
13、摄像头,用于采集实时的图像;
14、超声波测距模块,用于测量无人机与灯头的距离,确定无人机的悬停位置,从而控制单灯夹具的旋转角度、伸缩机构的长度以及握手机构的位置。
15、具体的,所述无人机还包括内置的:
16、风力测量模块,实时提供风向和风力的数据。
17、具体的,所述拆装机构还包括固定设置在无人机上的旋转平台;
18、所述单灯夹具设有两只,分别设置在旋转平台的转台上,通过所述旋转平台的旋转,交替更换两只所述单灯夹具的位置。
19、具体的,所述夹手夹子呈三角形结构;
20、所述夹子长支架与夹手夹子之间通过两个铰接轴铰接。
21、具体的,所述夹子长支架至少包括设置在同一平行面的长支架单体。
22、具体的,所述夹手夹子中部设有镂空区。
23、具体的,所述单灯夹具包括:
24、夹具无刷电机,固定设置在所述旋转平台上;
25、夹具筒体,固定设置在所述夹具无刷电机上,并设有与所述夹具无刷电机的旋转轴适配的安装孔;
26、对接座,与所述夹具无刷电机的旋转轴固定连接;所述对接座上设有若干与单灯控制器适配的卡舌。
27、一种无人机自主更换单灯控制器智能装置的工作方法,包括以下步骤:
28、步骤s100,无人机水平起飞至灯头的上方,寻找单灯控制器并悬停在单灯控制器的正上方;
29、步骤s110,无人机飞至灯头上方,基于内置摄像头的摄像功能,首先采集一张灯头上方的图片,主控芯片基于霍夫梯度法对图片进行处理,筛选图片中的圆形物件,进而确定单灯控制器的位置,采集单灯控制器的圆心的坐标点为(x,y),其中x表示圆心在图片中的横坐标,y表示圆心在图片中的纵坐标,将该坐标与图片的中点坐标(a,b)进行对比,进行无人机位置调整。
30、具体的,步骤s110中无人机位置调整方法为:
31、步骤s111,无人机位置调整首先进行横坐标的校正,如果a在x反向上,那么无人机就会沿着横坐标进行反向移动,否则正向移动,直到a与x重合,然后进行纵坐标的校正,如果b在y反向上,那么无人机就会沿着纵坐标进行反向移动,否则正向移动,直到b与y重合,此时,摄像头位于单灯控制器的正上方。
32、本案有益效果:
33、第一,本案装置更换单灯控制器,操作时间在3-5分钟。如果人工更换,操作时间平均10-20分钟。如果加上升降设备移动、固定、工作人员休整等,耗费的时间更长。使用无人机更换单灯控制器,能够有效提高工作效率。
34、第二,无人机代替人员上下,不需要升降车等装备辅助,节省了操作成本。
35、第三,无人机代替人工,降低了人员劳动强度,避免高空作业,提高劳动安全性。
36、第四,机器智能代替人工,不会像人一样受到流汗、心绪、风吹日晒等影响,保证操作稳定性和准确性。
技术特征:
1.一种无人机自主更换单灯控制器智能装置,其特征在于,包括:
2.根据权利要求1所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述无人机(1)包括内置的:
3.根据权利要求2所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述无人机(1)还包括内置的:
4.根据权利要求1所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述拆装机构还包括固定设置在无人机(1)上的旋转平台;
5.根据权利要求1所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述夹手夹子(13)呈三角形结构;
6.根据权利要求1或5所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述夹子长支架(15)至少包括设置在同一平行面的长支架单体。
7.根据权利要求1或5所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述夹手夹子(13)中部设有镂空区。
8.根据权利要求4所述的一种无人机自主更换单灯控制器智能装置,其特征在于,所述单灯夹具(2)包括:
9.包括权利要求1-8任一所述的一种无人机自主更换单灯控制器智能装置,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种无人机自主更换单灯控制器智能装置的工作方法,其特征在于,步骤s110中无人机(1)位置调整方法为:
技术总结
一种无人机自主更换单灯控制器智能装置及工作方法,涉及城市照明技术领域。包括:拆装机构,包括单灯夹具;所述单灯夹具内设有可旋转的对接座;所述对接座上设有与单灯控制器适配的卡腔,通过所述对接座的旋转将单灯控制器与控制器插座解锁;伸缩机构,设有一对,对称设置在无人机的下方;包括无人机支架和一对万向伸缩杆;所述万向伸缩杆的顶部与无人机的下方连接,底部与无人机支架连接;通过所述伸缩机构的伸缩控制无人机支架与单灯夹具之间的间距;握手机构,至少设有两只,对称设置在相应所述无人机支架的内侧;本发明保证操作稳定性和准确性。
技术研发人员:卜爱青,郭杰,袁欣星,徐建,孟春松,任行乐
受保护的技术使用者:江苏宝尔电子有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!