一种石英舟的自动化焊接机及其使用方法与流程
本发明涉及石英舟焊接机,具体为一种石英舟的自动化焊接机及其使用方法。
背景技术:
1、石英舟是一种用于半导体生产的承载设备,其主要通过四个石英棒和两个支撑侧板焊接而成,通过石英棒上的多个凹槽承载外界的半导体晶圆产品,然而现有的石英舟焊接机还存在一些问题:
2、例如公开号为cn116511810b的一种石英舟用自动化焊接机,现有的焊接机在对石英舟组件焊接时,需要将各种组件拼装在一起便于焊接操作,但在焊接时会产生一定的冲击力而导致拼装的组件晃动,继而导致组件之间连接的位置发生偏移,从而降低了组件之间焊接的精准度;包括底板,所述底板上对称安装有侧面板,侧面板上安装有安装夹座;
3、上述装置,其使用过程中,需要使用者手动将石英棒料放置到支撑结构上,从而降低了工作效率,且支撑结构位置固定,装置难以适应不同的石英舟生产规格。
4、针对上述问题,急需在原有石英舟焊接机的基础上进行创新设计。
技术实现思路
1、本发明的目的在于提供一种石英舟的自动化焊接机及其使用方法,以解决上述背景技术提出现有的石英舟焊接机,其使用过程中,需要使用者手动将石英棒料放置到支撑结构上,从而降低了工作效率,且支撑结构位置固定,装置难以适应不同石英舟生产规格的问题。
2、为实现上述目的,本发明提供如下技术方案:一种石英舟的自动化焊接机及其使用方法,包括:
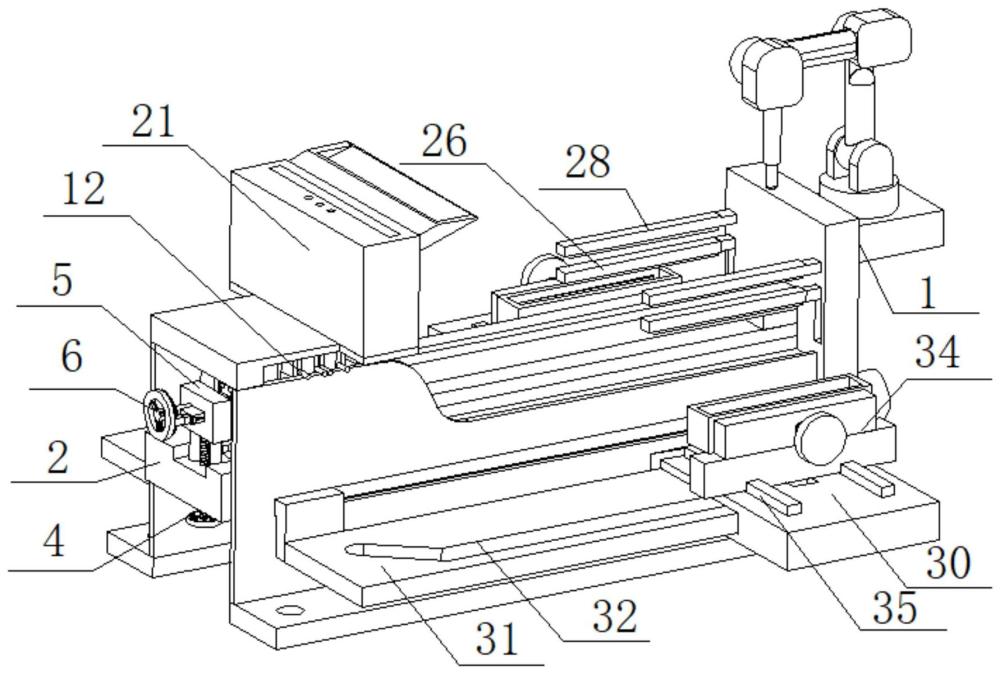
3、机体,其端部内侧贴合设置有支撑台,所述支撑台的两端滑动贴合设置在所述机体侧壁上的导槽内形成滑动限位结构,且支撑台底部螺纹连接有水平设置的动力螺杆形成传动结构,并且动力螺杆的端部设置有伺服电机,而且动力螺杆的杆身转动贯穿与所述机体设置;
4、其特征在于,还包括:
5、移动块,其底部的立杆滑动插设在所述支撑台上,所述移动块的中部转动贯穿安装有水平控制件,且移动块的底部中心处转动安装有升降杆的顶端,并且升降杆贯穿与所述支撑台设置形成螺纹传动关系,所述移动块的边侧正对设置有调节板,且调节板底部的立杆滑动插设在所述支撑台的顶部,并且移动块和调节板之间固定连接有水平设置的切换机构,所述调节板靠近移动块的一侧上方设置有下料机构,且下料机构固定安装在所述机体的顶部的进料口处,并且下料机构的下端口处由上而下依次设置有上挡料件和下排料件;
6、装载架,其固定对称安装在所述机体远离移动块的一侧,所述装载架的上表面贴合设置有对应的夹具组件用于夹持石英板料,且夹具组件底部滑动贯穿安装有对称分布的滑轨,并且滑轨固定安装在所述装载架上,所述滑轨的下方设置有推板,且推板水平滑动贯穿于所述装载架设置,并且推板远离装载架的一端固定安装在所述支撑台上,所述推板上开设有导向槽,且导向槽一侧贯通贴合设置有移动柱,且移动柱顶部固定连接有所述夹具组件,并且移动柱底部的限位环贴合设置在装载架的底面上,而且移动柱中部经过装载架上贯通槽,所述导向槽远离移动柱的一端倾斜朝向第二支撑架设置。
7、优选的,所述水平控制件包括水平螺杆,所述水平螺杆的两端分别转动安装在所述移动块和调节板上,且水平螺杆端部的矩形安装槽内滑动插设有手轮的横轴两者同轴设置,并且水平螺杆与升降杆相互垂直设置,所述调节板顶部的限位槽内滑动安装有对接架的底端,且对接架顶部贴合安装在所述机体远离移动块的一侧形成滑动升降结构,并且对接架两端固定安装有对称分布的水平第一横筒,所述第一横筒底部安装槽内设置有第一紧固板,两者通过金属弹片弹性连接,且第一横筒的上方水平设置有第二横筒,并且第二横筒的端部固定连接在机体的外壁上,所述第二横筒下部的收纳槽中设置有第二紧固板,两者通过金属弹片弹性连接,所述第一紧固板朝向第二支撑架的棒槽两侧设置形成石英棒料压紧结构,所述第二紧固板朝向第一支撑架的棒槽两侧设置形成对应的石英棒料压紧结构,使得调节板能够通过对接架带动第一横筒移动。
8、优选的,所述移动块和调节板之间设置有两个对称分别的移动台,且移动台中部贯穿安装有水平螺杆,并且水平螺杆上旋向相反的螺纹于对应的移动台形成传动关系,所述移动台上贴合安装有对应的第一支撑架和第二支撑架,且移动台两侧的凸块嵌设在所述第一支撑架内侧的竖槽中形成滑动限位结构,并且第一支撑架的外壁贴合设置所述机体和支撑台之间,使得水平螺杆能够带动移动台水平移动。
9、优选的,所述第一支撑架的边侧贴合设置有第二支撑架,且第二支撑架底部固定安装有连接架,并且连接架顶部和第二支撑架之间设置有移动台,而且移动台顶部滑动贯穿安装有导轨,同时导轨一端顶部固定连接在所述第二支撑架的底部,所述连接架底端贴合设置所述支撑台上开设的贯通槽中,且连接架底部侧壁上滑动插设有水平的阻尼块,并且阻尼块的一端与所述连接架的内壁之间固定连接有用于提供压力的第一弹簧,而且阻尼块的另一端设置有三角形齿牙,所述阻尼块的齿牙贴合嵌设在齿板上形成阻尼结构,且齿板外壁固定安装在所述机体的内壁上,使得第二支撑架能够带动连接架移动。
10、优选的,所述第二支撑架的顶部两端滑动套设有对应的外罩,且外罩和第二支撑架的外壁贴合设置在所述机体的内侧,所述外罩两侧固定安装有对称分布的支撑杆,且支撑杆贴合设置在所述机体的侧壁顶部,所述外罩和第一支撑架的顶部中心处均固定安装有对应的触发块,且触发块贴合设置在所述机体内壁顶部开设的导槽中,所述移动台远离导轨的一侧滑动插设有对应的传动杆,且传动杆中部的凸环与所述移动台的内壁之间固定连接有第二弹簧,并且传动杆的端部滑动插设在所述第二支撑架的内壁上形成传动结构,使得移动台能够通过传动杆带动第二支撑架移动。
11、优选的,所述切换机构包括限制板,所述限制板贴合设置在收纳筒的内壁上,且收纳筒滑动贯穿安装在移动台远离导轨的一侧,并且收纳筒的两端分别固定连接在移动块和调节板上,所述收纳筒的内壁与所述限制板的一侧之间固定连接有等间距分布的第三弹簧,且限制板的另一侧外壁上贴合设置有传动杆远离第二支撑架的一端,所述限制板靠近手轮的一端设置受力斜面,所述限制板的受力斜面上贴合设置有压板,且压板的端部外壁上固定安装有水平的滑块,所述滑块贴合安装在所述收纳筒上开设的贯通槽中形成滑动限位结构,所述压板的端部贴合设置在所述收纳筒的进口处,所述压板远离滑块的一侧贯穿安装有手轮上的连接环形成转动限位结构,且压杆的轴线与所述手轮的轴线平行设置在同一水平面内,使得压板能够带动滑块移动。
12、优选的,所述下料机构包括储料箱,所述储料箱固定安装在所述机体顶部的进料口处形成石英棒储存结构,且储料箱内部滑动插设有竖直的竖杆,并且竖杆外侧套设有对应的复位弹簧,所述竖杆下端垂直固定安装在控制块上,所述控制块贴合设置在所述储料箱的内壁底部,且控制块底面中部固定安装有检测块,并且检测块滑动贯穿安装在机体的顶部,所述检测块朝向触发块设置,且检测块和触发块的截面均呈三角形,使得控制块能够在储料箱内移动。
13、优选的,所述上挡料件包括上受力杆,所述上受力杆贴合在控制块中部开设的斜槽顶部,且上受力杆两侧固定安装有对称分布的上挡板,所述上挡板贴合设置在储料箱内部的水平贯通槽中,使得上受力杆能够带动上挡板移动。
14、优选的,所述下排料件包括下受力杆,所述下受力杆贴合设置在控制块下部的贯通斜槽中,且控制块下部和中部的斜槽倾斜方向相反,所述下受力杆的两端固定有对称分布的下排料板,且下排料板倾斜设置,并且下排料板顶部插设在储料箱内部的收纳槽中,而且下排料板底部处于储料箱的石英棒料储仓中,使得下受力杆能够带动下排料板移动。
15、石英舟自动化焊接机的操作方法如下:
16、s1:石英舟产品是通过四个石英棒料和两个石英侧板连接而成,同时棒料上设置的凹槽放置半导体晶圆等产品,安装有伺服电机的动力螺杆能够带动支撑台移动,当使用者需要根据石英舟规格调节装置内石英棒料支撑结构的位置时,先转动升降杆,利用升降杆带动移动块5向下移动,移动块通过收纳筒带动调节板同步向支撑台移动,经测量后使移动块和支撑台之间的间距达到设定值,此过程中,移动块通过收纳筒带动移动台沿着第一支撑架向下移动,移动台利用传动杆带动第二支撑架和连接架同步向下移动,外罩上的支撑杆贴合在机体顶部,使得第二支撑架顶部从外罩内伸出,此时第二支撑架和第一支撑架之间棒槽的高度发生改变,此过程中,调节板会带动对接架同步移动,对接架会带动两个第一横筒向下移动,使得第一横筒内的第一紧固板能够适应对应的第二支撑架高度;
17、s2:接着转动手轮,此时手轮将通过水平螺杆带动两个移动台相互远离,移动台将带动对应的第一支撑架和第二支撑架移动,此过程中,第二支撑架会通过连接架带动对应的阻尼块在齿板上移动,阻尼块和连接架之间连接的第一弹簧将产生相应形变,经测量使第一支撑架和移动块之间的距离达到设定值后,此时两个第一支撑架之间的距离达标;
18、s3:然后水平推动手轮,使得手轮能够推动压板移动,压板将带动滑块沿着收纳筒上的滑槽移动,使得压板端部的斜面能够推动限制板在收纳筒内移动将第三弹簧进一步压缩,此时限制板将远离传动杆,第二弹簧将通过复位作用推动传动杆移动,使得传动杆的端部能够从第二支撑架上的脱离解除传动关系,移动台将无法带动第二支撑架移动,然后继续转动手轮,此时手轮将通过水平螺杆再次带动移动台移动,而移动台会带动第一支撑架水平移动,使得第一支撑架远离对应的第二支撑架,经测量使第一支撑架和移动块之间的距离再次达到设定值后,此时两个第二支撑架的位置达标,从而实现石英棒料支撑结构的位置调节,使用者将石英板料紧固安装在夹具组件上;
19、s4:再控制动力螺杆启动,利用动力螺杆带动支撑台再机体1内移动,上述石英棒料支撑结构将跟随支撑台同步移动,外罩套设在第二支撑架顶端,此时第一支撑架和外罩上的触发块将同步移动,当触发块挤压检测块时,检测块将推动控制块向上移动将复位弹簧压缩,此过程中,控制块上的两个斜槽将向上受力杆和下受力杆施加压力,使得上受力杆能够带动上挡板伸向储料箱料仓内侧,从而将倒数第二个石英棒料拦截,同时下受力杆会带动对应的下排料板移动,使得下排料板缩入储料箱的内部,使得储料箱内倒数第一个石英棒料能够排出,此时石英棒料能够依次落入对应的第一支撑架和第二支撑架内侧,完成自动下料;
20、s5:动力螺杆继续带动支撑台移动,此时上述石英棒料支撑结构将向着两个夹具组件之间的位置移动,使得第一支撑架8棒槽内的石英棒能够向第二紧固板靠近,第二紧固板被压入第二横筒中将对应的弹片压缩,从而提供对应石英棒料两端的紧固力,同时第二支撑架内的石英棒能够向第一紧固板移动,使得第一紧固板进入第一横筒中将弹片压缩,使得第一紧固板能够将第二支撑架上的石英棒料压紧,在上述过程中,支撑台会带动推板同步移动,使得使得夹具组件底部的移动柱能够在推板上的导向槽中移动,利用导向槽的倾斜端部对移动柱施加推力,使得移动柱能够带动夹具组件在滑轨上移动,此时夹具组件上的石英料板将贴合设置在对应的石英棒料端面上,接着使用者通过操控机体上的焊接设备对石英棒料和石英侧板进行焊接,从而制成石英舟,加工完成后,利用动力螺杆带动支撑台移动,使得加工完成的石英舟移动到机体中部,即可将石英舟产品取出。
21、与现有技术相比,本发明的有益效果是:该石英舟的自动化焊接机及其使用方法,其设置有快速下料机构,能够自动将石英棒料放置到支撑结构上,从而提高了工作效率,且装置能够调节石英棒料支撑结构的位置,从而适应不同的石英舟生产规格,其具体内容如下:
22、1、移动块和调节板之间设置有两个对称分别的移动台,移动台中部贯穿安装有水平螺杆,水平螺杆上旋向相反的螺纹于对应的移动台形成传动关系,移动台上贴合安装有对应的第一支撑架和第二支撑架,移动台两侧的凸块嵌设在第一支撑架内侧的竖槽中形成滑动限位结构,通过水平螺杆带动移动台移动,使得移动台能够带动对应的第一支撑架和第二支撑架移动,同时第二支撑架顶部能够从滑动的外罩中伸出;
23、2、上受力杆贴合在控制块中部开设的斜槽顶部,上受力杆两侧固定安装有对称分布的上挡板,上挡板贴合设置在储料箱内部的水平贯通槽中,下受力杆贴合设置在控制块下部的贯通斜槽中,控制块下部和中部的斜槽倾斜方向相反,下受力杆的两端固定有对称分布的下排料板,下排料板倾斜设置,并且下排料板顶部插设在储料箱内部的收纳槽中,下排料板底部处于储料箱的石英棒料储仓中,当控制块向上移动时,控制块会带动上受力杆和下受力杆同步移动,使得上受力杆带动上挡板伸出挡住棒料,而下受力杆带动下排料板移动,使得下排料板不再阻挡最底部的棒料,从而实现自动下料。
- 还没有人留言评论。精彩留言会获得点赞!