一种下压模块及上下料机构的制作方法
本技术属于上下料结构,尤其是一种下压模块及上下料机构。
背景技术:
1、现有bsb上下料机构,为龙门结构,结构大,运行速度慢,上下料机器人无法不间断上下料,影响生产速度。
技术实现思路
1、为解决现有技术中存在的上下料机器人无法不间断上下料、影响生产速度的技术问题,提出以下技术方案:
2、一种下压模块,其特征在于,设有铜嘴、用于带动所述铜嘴来回移动的驱动组件和激光器,当待焊接物移动到焊接位置时,在所述驱动组件的作用下所述铜嘴向所述待焊接物的方向移动,直至所述铜嘴压住所述待焊接物,所述铜嘴中设有一个或多个通孔,由所述激光器输出的激光束能够通过所述通孔到达所述待焊接物,所述激光器中设有分束器。
3、一种下压模块,下压模块中设有导轨垫板、安装板、下压气缸、安装基板、铜嘴升降板和升降直线导轨;所述安装基板安装有所述导轨垫板,所述导轨垫板用于安装升降直线导轨,所述升降直线导轨上设有铜嘴升降板,所述铜嘴升降板能够在所述下压气缸的作用下,沿所述升降直线导轨上下移动,与所述铜嘴升降板连接的所述安装板也随之上下移动;当待焊接物移动到焊接位置时,所述安装板向靠近所述待焊接物的方向移动。所述铜嘴升降板上开设有多个用于经过激光束的铜嘴。激光器用于输出激光束,所述激光器中设有分束器,所述分束器用于将一束激光束分割成多束激光束,所述多束激光束能够经过多个所述铜嘴到达待焊接物。
4、一种上下料机构,设有第一焊接工位、第二焊接工位、搬运机器人和下压模块,所述第一焊接工位和所述第二焊接工位各自独立工作,所述搬运机器人位于所述第一焊接工位和所述第二焊接工位中间;还设有输送线定位组件,所述输送线定位组件用于对待焊接物进行定位,并将完成定位的所述待焊接物搬运至待焊接位置,所述搬运机器人将待焊接物被搬运到所述输送线定位组件,由所述输送线定位组件输送至焊接位置;所述第一焊接工位和所述第二焊接工位中均设有输送模块、下压模块和激光器;输送模块中设有直线导轨安装座、直线导轨、定位底板、定位底座、模组和电机;下压模块中设有导轨垫板、安装板、下压气缸、安装基板、铜嘴升降板和升降直线导轨;所述安装基板安装有所述导轨垫板,所述导轨垫板用于安装升降直线导轨,所述升降直线导轨上设有铜嘴升降板,所述铜嘴升降板能够在所述下压气缸的作用下,沿所述升降直线导轨上下移动,与所述铜嘴升降板连接的所述安装板也随之上下移动;当待焊接物移动到焊接位置时,所述安装板向靠近所述待焊接物的方向移动。所述铜嘴升降板上开设有多个用于经过激光束的铜嘴。激光器用于输出激光束,所述激光器中设有分束器,所述分束器用于将一束激光束分割成多束激光束,所述多束激光束能够经过多个所述铜嘴到达待焊接物。
5、提供一种上下料机构,设有下压模块,设有第一焊接工位、第二焊接工位和搬运机器人,所述第一焊接工位和所述第二焊接工位各自独立工作,所述搬运机器人位于所述第一焊接工位和所述第二焊接工位中间,所述搬运机器人用于将待焊接物搬运至所述第一焊接工位和所述第二焊接工位的初始位置;所述第一焊接工位和所述第二焊接工位中均设有输送模块和激光器;所述输送模块用于将待焊接物由初始位置输送至待焊接位置,所述激光器用于对位于焊接位置的待焊接物进行焊接。输送模块中设有直线导轨安装座、直线导轨、定位底板、定位底座、模组和电机。
6、可选的,还设有激光器,所述激光器上设有集尘罩,所述集尘罩与外部抽烟管连接,用于抽取焊接时产生的烟尘。
7、可选的,焊接防护部为铜嘴,所述铜嘴在下压底面受外力时,会向上移动一定的距离。
8、可选的,在外力消除后,铜嘴下降到最低点。
9、可选的,输送线定位组件中设有定位底座和定位底板,所述定位底板设置在定位底座上,所述定位底板用于固定待焊接物。
10、可选的,输送线定位组件中还设有第一定位模块、第二定位模块和平移模块,所述第一定位模块位于后侧,所述第二定位模块位于前侧,在所述平移模块作用下,所述第二定位模块先达到待焊接位置,所述第一定位模块后达到待焊接位置。
11、可选的,所述平移模块与驱动模块连接,在所述驱动模块的作用下,所述平移模块带动所述第一定位模块和所述第二定位模块移动,所述第一定位模块和所述第二定位模块均用于夹持待焊接物。
12、可选的,安装板还设有铜嘴安装板和铜嘴,当待焊接物移动到焊接位置时,所述铜嘴向靠近所述待焊接物的方向移动,当移动到目标位置后,第一焊接工位或第二焊接工位发出激光束,所述激光束穿过所述铜嘴到达待焊接物。
13、可选的,铜嘴安装板和铜嘴之间设有矩形弹簧。
14、提供一种上下料方法,通过上述任意一项所述的上下料机构来执行上下料方法的步骤。
15、本实用新型的有益效果:把以往的龙门架结构,通过优化设计结构,整合为两个独立的可以不间断上下料的输送模块。并且降低了结构高度,开阔了视野,实现了独立的双工位上下料,且各个上下料工位可以实现无间断送料,定位可靠;易调平,效果较好。方便安装和调试。易于操作,提高了效率和可靠性,本模块是一种优化了的快速上下料模块,在结构上是一个很大的进步。通过将单一的激光束拆分成多束激光束,可采用多束激光束同时对多个铜嘴位置的待焊接物进行焊接,可提高焊接效率。通过上下可升降的铜嘴可将待焊接物固定住,防止焊接过程中待焊接物翘起,减少误焊现象的发生,同时焊接中产生的烟尘会集中在铜嘴内部,可防止待焊接物的其他部位被污染。
技术特征:
1.一种下压模块,其特征在于,设有铜嘴(5-8)、用于带动所述铜嘴来回移动的驱动组件和激光器(6),当待焊接物(10)移动到焊接位置时,在所述驱动组件的作用下所述铜嘴(5-8)向所述待焊接物(10)的方向移动,直至所述铜嘴(5-8)压住所述待焊接物(10),所述铜嘴(5-8)中设有一个或多个通孔,由所述激光器(6)输出的激光束能够通过所述通孔到达所述待焊接物(10),所述激光器(6)中设有分束器(11)。
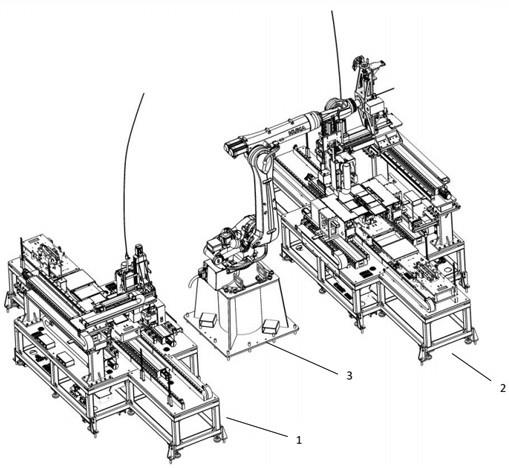
2.一种上下料机构,设有如权利要求1所述的下压模块(5),其特征在于,设有第一焊接工位(1)、第二焊接工位(2)和搬运机器人(3),所述第一焊接工位(1)和所述第二焊接工位(2)各自独立工作,所述搬运机器人(3)位于所述第一焊接工位(1)和所述第二焊接工位(2)中间。
3.根据权利要求2所述的上下料机构,其特征在于,还设有输送线定位组件(7),所述输送线定位组件(7)用于对待焊接物(10)进行定位,并将完成定位的所述待焊接物(10)搬运至待焊接位置,所述搬运机器人(3)将待焊接物(10)被搬运到所述输送线定位组件(7),由所述输送线定位组件(7)输送至焊接位置。
4.根据权利要求2所述的上下料机构,其特征在于,激光器(6)上设有集尘罩,所述集尘罩与外部抽烟管连接,用于抽取焊接时产生的烟尘。
5.根据权利要求2所述的上下料机构,其特征在于,焊接防护部为铜嘴,所述铜嘴在下压底面受外力时,会向上移动一定的距离;在外力消除后,铜嘴下降到最低点。
6.根据权利要求3所述的上下料机构,其特征在于,输送线定位组件(7)中设有定位底座(7-1)和定位底板(7-2),所述定位底板(7-2)设置在定位底座(7-1)上,所述定位底板(7-2)用于固定待焊接物(10);输送线定位组件(7)中还设有第一定位模块(7-3)、第二定位模块(7-4)和平移模块(7-5),所述第一定位模块(7-3)位于后侧,所述第二定位模块(7-4)位于前侧,在所述平移模块(7-5)作用下,所述第二定位模块(7-4)先达到待焊接位置,所述第一定位模块(7-3)后达到待焊接位置。
7.根据权利要求6所述的上下料机构,其特征在于,所述平移模块(7-5)与驱动模块连接,在所述驱动模块的作用下,所述平移模块(7-5)带动所述第一定位模块(7-3)和所述第二定位模块(7-4)移动,所述第一定位模块(7-3)和所述第二定位模块(7-4)均用于夹持待焊接物(10)。
8.根据权利要求2所述的上下料机构,其特征在于,安装板(5-2)还设有铜嘴安装板(5-7),所述铜嘴安装板(5-7)和铜嘴(5-8)之间设有矩形弹簧(5-9)。
技术总结
本技术是一种下压模块及上下料机构,本技术属于上下料结构技术领域。设有铜嘴、用于带动所述铜嘴来回移动的驱动组件和激光器,当待焊接物移动到焊接位置时,在所述驱动组件的作用下所述铜嘴向所述待焊接物的方向移动,直至所述铜嘴压住所述待焊接物,所述铜嘴中设有一个或多个通孔,由所述激光器输出的激光束能够通过所述通孔到达所述待焊接物,所述激光器中设有分束器。本技术实现了独立的双工位上下料,且各个上下料工位可以实现无间断送料,定位可靠。
技术研发人员:请求不公布姓名
受保护的技术使用者:深圳市联赢激光股份有限公司
技术研发日:20230103
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!