一种夹爪装置及加工设备的制作方法
本申请涉及电池,特别是涉及一种夹爪装置及加工设备。
背景技术:
1、在对电池进行生产加工时,需要对电池单体进行搬运及传送。在此过程中,为了防止电池单体发生掉落,需要对电池单体进行夹紧,以确保电池单体运输过程中的稳定性。
2、然而,此时如果电池单体受到外力碰撞,将对电池单体的结构造成损伤,甚至损坏电池单体,影响整体生产效率。
技术实现思路
1、基于此,有必要针对电池单体在运输过程中容易因受到外力碰撞而导致结构损坏的问题,提供一种夹爪装置及加工设备。
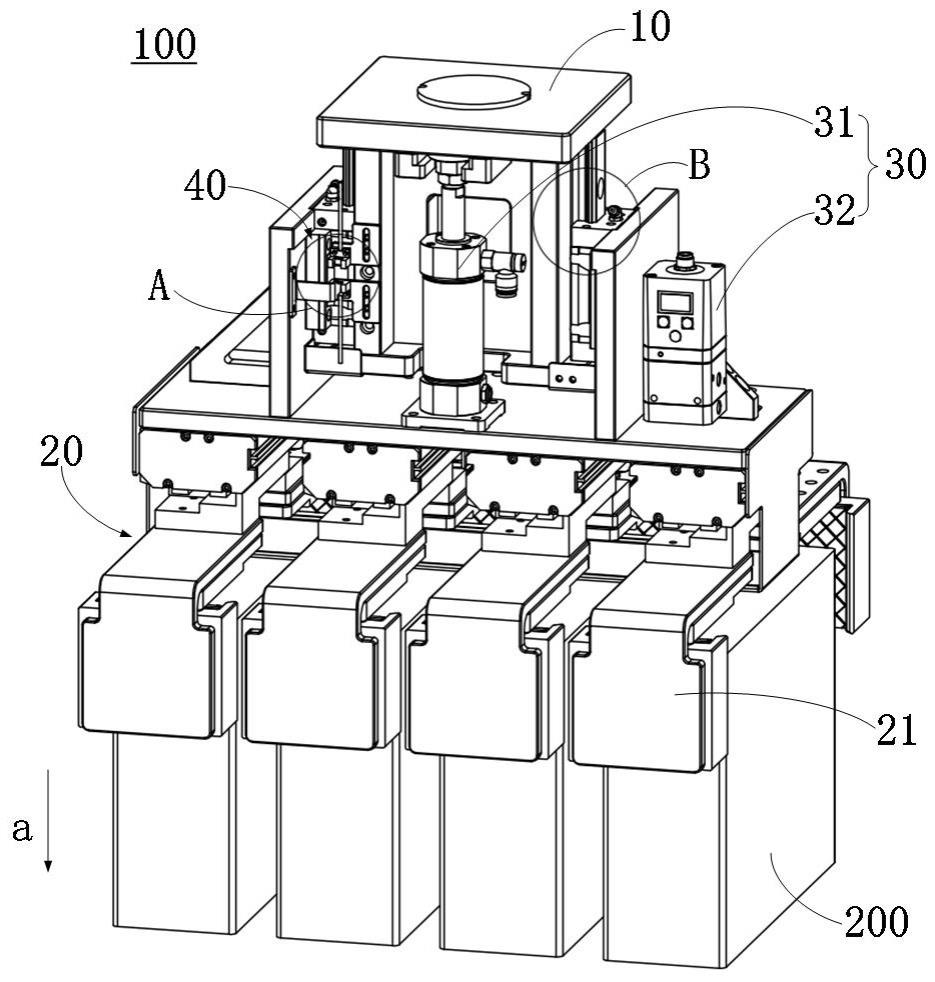
2、第一方面,本申请提供一种夹爪装置,包括:
3、基座;
4、夹持组件,沿预设方向与基座间隔设置;
5、平衡组件,连接于基座与夹持组件之间,用于沿预设方向提供平衡夹持组件及夹持于其上的目标件的重力的平衡力;以及
6、感应组件,装配于基座与夹持组件之间,用于感应夹持组件在外力作用下在预设方向上的第一位移;
7、其中,平衡组件能够根据第一位移带动夹持组件移动第二位移,第二位移大于或等于第一位移,且两者方向相同。
8、通过上述结构,在通过夹爪装置对目标件进行运输转移的过程中,能够在目标件上受到很小的外力时,通过平衡组件带动夹持组件及目标件快速避开外部结构,降低目标件因与外部结构发生碰撞而导致结构损坏的几率,从而有效保护目标件的结构。
9、在一些实施例中,平衡组件包括驱动件,驱动件沿预设方向可伸缩地连接于基座与夹持组件之间,驱动件能够带动夹持组件沿预设方向相对基座移动。
10、通过设置驱动件,首先可以平衡夹持组件及其上的目标件的总重力,使得夹持组件与目标件能够处于稳定的平衡状态。其次,当目标件与外部结构接触而受到外力作用时,驱动件能够及时带动夹持组件及目标件相对基座移动,从而调节目标件的位置,使得目标件能够避开外部结构,降低目标件因受到碰撞而损坏的几率。
11、在一些实施例中,平衡组件还包括与驱动件连接的调节件,调节件用于调节驱动件在预设方向上的平衡力。
12、通过控制调节件,即可快速调节驱动件的伸缩量,进而调节驱动件在预设方向上施加于夹持组件及目标件上的力,以便于更好地平衡夹持组件及目标件的重力。此外,当目标件与外部结构发生碰撞时,还可以通过控制调节件,快速调节驱动件的伸缩量,从而带动夹持组件共同调整目标件的位置,使得目标件能够更好地避开外部结构,保护目标件。
13、在一些实施例中,驱动件被构造为气缸,气缸的固定端与基座及夹持组件中的一者连接,气缸的活动端与基座及夹持组件中的另一者连接。
14、通过设置气缸,利用气缸的伸缩带动夹持组件相对基座移动,从而能够快速调整夹持组件上的目标件的位置,使其能够更好地避开外部结构,有效保护目标件的结构。
15、在一些实施例中,调节件被构造为调节阀,用于调节气缸的进气量。通过设置调节阀,可以调节气缸的进气压力,从而调节气缸所提供的平衡力的大小,更好地控制夹持组件及目标件的位置。
16、在一些实施例中,感应组件包括相互匹配的感应器及感应件,感应器与基座及夹持组件中的一者连接,感应件与基座及夹持组件中的另一者连接;
17、当夹持组件在外力作用下沿预设方向移动第一位移时,感应件触发感应器。
18、感应器与感应件的相互配合,能够在目标件与外部结构发生碰撞时快速响应,以使平衡组件能够迅速带动目标件避开外部结构,有效保护目标件。
19、在一些实施例中,夹爪装置还包括引导件与配合件,引导件设于基座及夹持组件中的一者上,配合件设于基座及夹持组件中的另一者上,以引导夹持组件在预设方向上相对基座移动。
20、当平衡组件带动夹持组件及目标件移动时,引导件及配合件能够起到引导作用,使得夹持组件及目标件相对基座移动的过程更加稳定。
21、在一些实施例中,引导件被构造为沿预设方向延伸设置的滑轨,配合件被构造为与滑轨配合的滑块。
22、滑块在滑轨内部沿预设方向滑动,从而带动与之连接的夹持组件沿预设方向相对基座移动,以实现目标件的位置调整。
23、在一些实施例中,夹爪装置还包括分别与感应组件及平衡组件通讯连接的控制组件,控制组件用于接收感应组件的信号并控制平衡组件带动夹持组件移动。
24、通过上述结构,可以使得平衡组件在感应组件被触发时带动目标件快速移动,使目标件的感应过程更加灵敏,对目标件的保护作用更好。
25、在一些实施例中,夹持组件包括至少两个用于夹取目标件的夹持件,各夹持件沿与预设方向相交的方向间隔排布。由此,多个夹持件可以同时夹取多个目标件,提高生产效率。
26、第二方面,本申请提供一种加工设备,用于加工电池单体,包括如上所述的夹爪装置,夹爪装置用于夹持并运输待加工的电池单体。
27、上述夹爪装置及加工设备,夹持组件可以实现对目标件的夹取,与此同时,平衡组件通过提供一定的平衡力,平衡夹持组件及夹持于其上的目标件的重力,从而使目标件及夹持组件共同处于一个失重的临界状态,此时目标件及夹持组件上所受到的所有力的总和为零;由此,当目标件因与外部结构接触而受到外力作用时,夹持组件与目标件可以在很小的外力作用下沿力的方向移动,从而产生第一位移,该第一位移可以触发感应组件,以使平衡组件能够立即带动夹持组件及其上的目标件移动,使目标件能够避开外部结构,降低目标件再次受到碰撞而发生损坏的几率。
技术特征:
1.一种夹爪装置,其特征在于,包括:
2.根据权利要求1所述的夹爪装置,其特征在于,所述平衡组件包括驱动件,所述驱动件沿所述预设方向可伸缩地连接于所述基座与所述夹持组件之间,所述驱动件能够带动所述夹持组件沿所述预设方向相对所述基座移动。
3.根据权利要求2所述的夹爪装置,其特征在于,所述平衡组件还包括与所述驱动件连接的调节件,所述调节件用于调节所述驱动件在所述预设方向上的平衡力。
4.根据权利要求3所述的夹爪装置,其特征在于,所述驱动件被构造为气缸,所述气缸的固定端与所述基座及所述夹持组件中的一者连接,所述气缸的活动端与所述基座及所述夹持组件中的另一者连接。
5.根据权利要求4所述的夹爪装置,其特征在于,所述调节件被构造为调节阀,用于调节所述气缸的进气量。
6.根据权利要求1所述的夹爪装置,其特征在于,所述感应组件包括相互匹配的感应器及感应件,所述感应器与所述基座及所述夹持组件中的一者连接,所述感应件与所述基座及所述夹持组件中的另一者连接;
7.根据权利要求1所述的夹爪装置,其特征在于,所述夹爪装置还包括引导件与配合件,所述引导件设于所述基座及所述夹持组件中的一者上,所述配合件设于所述基座及所述夹持组件中的另一者上,以引导所述夹持组件在所述预设方向上相对所述基座移动。
8.根据权利要求7所述的夹爪装置,其特征在于,所述引导件被构造为沿所述预设方向延伸设置的滑轨,所述配合件被构造为与所述滑轨配合的滑块。
9.根据权利要求1所述的夹爪装置,其特征在于,所述夹爪装置还包括分别与所述感应组件及所述平衡组件通讯连接的控制组件,所述控制组件用于接收所述感应组件的信号并控制所述平衡组件带动所述夹持组件移动。
10.根据权利要求1所述的夹爪装置,其特征在于,所述夹持组件包括至少两个用于夹取所述目标件的夹持件,各所述夹持件沿与所述预设方向相交的方向间隔排布。
11.一种加工设备,用于加工电池单体,其特征在于,包括如权利要求1-10任意一项所述的夹爪装置,所述夹爪装置用于夹持并运输待加工的电池单体。
技术总结
本申请涉及一种夹爪装置及加工设备,夹爪装置包括:基座;夹持组件,沿预设方向与基座间隔设置;平衡组件,连接于基座与夹持组件之间,沿预设方向提供平衡夹持组件及夹持于其上的目标件的重力的平衡力;以及感应组件,装配于基座与夹持组件之间,用于感应夹持组件在预设方向上的第一位移;其中,平衡组件能够带动夹持组件移动第二位移,第二位移大于或等于第一位移,且两者方向相同。本申请能够平衡夹持组件及夹持于其上的目标件的重力,使目标件处于失重的临界状态,当目标件受到外力时,目标件可以在很小的外力下沿力的方向移动,从而触发感应组件,以使平衡组件能够立即带动目标件移动,使目标件能够避开外部结构。
技术研发人员:廖宏焱
受保护的技术使用者:宁德时代新能源科技股份有限公司
技术研发日:20230109
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!