一种车桥双机器人焊接装置的制作方法
本技术涉及焊接装置,尤其涉及一种车桥双机器人焊接装置。
背景技术:
1、随着我国汽车行业自动化水平的提高,越来越多的汽车配件采用自动化方式焊接,机器人焊接的情况更多,车桥是每辆汽车都包含的配件,它的自动化焊接应用对于保证产品质量,提高生产效率方面效果明显;
2、经检索,授权公告号为cn206296549u的专利提出了一种立柱双机器人焊接系统,该系统通过双工位、双机器人的设置,一个工位进行焊接,一个工位人工进行上下料,焊接机器人可通过围绕z轴旋转来实现在两工位间相互切换的功能,双工位循环工作,提高工作效率;
3、但是该装置采用双工位的设计结构,大大增加了设备的占用面积,在一些面积较小的厂房内,不能够使用,因此本实用新型提出一种车桥双机器人焊接装置以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本实用新型提出一种车桥双机器人焊接装置,该车桥双机器人焊接装置通过采用三轴水平旋转变位机,将双工位分别设置在三轴水平旋转变位机的两侧,通过变位机对工位进行旋转,在通过两组机器人焊接系统对车桥进行焊接,减少工位的占地面积。
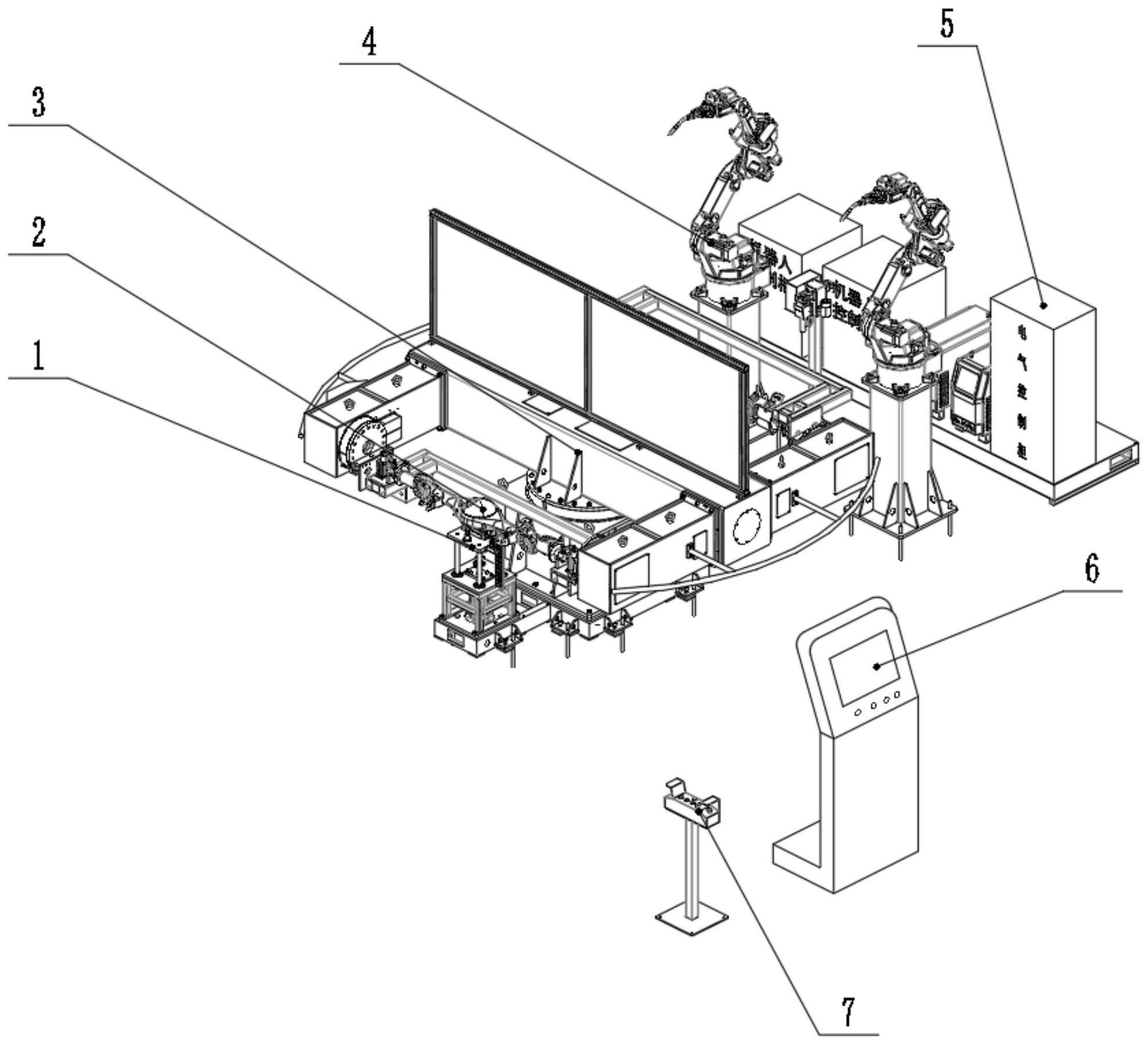
2、为实现本实用新型的目的,本实用新型通过以下技术方案实现:一种车桥双机器人焊接装置,包括车桥自动定位夹具、车桥、三轴水平旋转变位机和机器人焊接系统,所述三轴水平旋转变位机的两侧均对称设有车桥自动定位夹具,所述车桥自动定位夹具上固定有车桥,所述三轴水平旋转变位机的一侧对称设有机器人焊接系统,两组所述机器人焊接系统的一侧设有电气控制柜,所述三轴水平旋转变位机的前侧设有智能焊接系统面板,所述智能焊接系统面板的一侧设有控制按钮站。
3、进一步改进在于:所述智能焊接系统面板与机器人焊接系统、电气控制柜、三轴水平旋转变位机以及车桥自动定位夹具电性连接。
4、进一步改进在于:所述车桥自动定位夹具是为车桥定制的具有自定心功能的工装组件,所述车桥自动定位夹具通过气动内撑方式对车桥的基准进行定心并通过气动压紧的方式压紧车桥。
5、进一步改进在于:所述机器人焊接系统为标准焊接机器人系统,其包括焊接机器人本体、焊接电源、送丝机构、焊枪、防碰撞传感器以及整体通讯电缆。
6、本实用新型的有益效果为:本实用新型通过采用三轴水平旋转变位机,将双工位分别设置在三轴水平旋转变位机的两侧,通过变位机对工位进行旋转,在通过两组机器人焊接系统对车桥进行焊接,减少工位的占地面积,同时一边进行焊接的同时,另一工位进行车桥的安装和拆卸,相较于传统的双工位焊接系统,本结构占地面积更小,大大增加了本装置适用范围。
技术特征:
1.一种车桥双机器人焊接装置,其特征在于:包括车桥自动定位夹具(1)、车桥(2)、三轴水平旋转变位机(3)和机器人焊接系统(4),所述三轴水平旋转变位机(3)的两侧均对称设有车桥自动定位夹具(1),所述车桥自动定位夹具(1)上固定有车桥(2),所述三轴水平旋转变位机(3)的一侧对称设有机器人焊接系统(4),两组所述机器人焊接系统(4)的一侧设有电气控制柜(5),所述三轴水平旋转变位机(3)的前侧设有智能焊接系统面板(6),所述智能焊接系统面板(6)的一侧设有控制按钮站(7)。
2.根据权利要求1所述的一种车桥双机器人焊接装置,其特征在于:所述智能焊接系统面板(6)与机器人焊接系统(4)、电气控制柜(5)、三轴水平旋转变位机(3)以及车桥自动定位夹具(1)电性连接。
3.根据权利要求1所述的一种车桥双机器人焊接装置,其特征在于:所述车桥自动定位夹具(1)是为车桥(2)定制的具有自定心功能的工装组件,所述车桥自动定位夹具(1)通过气动内撑方式对车桥(2)的基准进行定心并通过气动压紧的方式压紧车桥(2)。
4.根据权利要求1所述的一种车桥双机器人焊接装置,其特征在于:所述机器人焊接系统(4)包括焊接机器人本体、焊接电源、送丝机构、焊枪、防碰撞传感器以及整体通讯电缆。
技术总结
本技术提供了一种车桥双机器人焊接装置,涉及焊接装置领域,包括车桥自动定位夹具、车桥、三轴水平旋转变位机和机器人焊接系统,所述三轴水平旋转变位机的两侧均对称设有车桥自动定位夹具,所述车桥自动定位夹具上固定有车桥,所述三轴水平旋转变位机的一侧对称设有机器人焊接系统,两组所述机器人焊接系统的一侧设有电气控制柜,所述三轴水平旋转变位机的前侧设有智能焊接系统面板;本技术通过采用三轴水平旋转变位机,将双工位分别设置在三轴水平旋转变位机的两侧,通过变位机对工位进行旋转,在通过两组机器人焊接系统对车桥进行焊接,减少工位的占地面积。
技术研发人员:高俊,叶路路,周立华,李佩华
受保护的技术使用者:辽宁双华焊割装备有限公司
技术研发日:20230202
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!