定位组件、装夹机构、进给单元及线切割机的制作方法
本申请涉及线切割,具体提供一种定位组件、装夹机构、进给单元及线切割机。
背景技术:
1、线切割机是一种通过金刚线的高速往复运动对待切割件进行切割的设备。线切割机一般包括切割总成和进给单元,待切割工件通过工件台安装在进给单元上,通过进给单元朝向切割总成进给移动,实现对安装于工件台上的的待切割工件的切割。
2、工件台向进给单元上安装的过程中,需要将工件台调整至设定位置后,才能够将工件台夹紧固定。但是在工件台的实际安装过程中,受到人为操作因素、设备震动等多方面因素影响,工件台的安装位置容易产生偏差,而在这种情况下,则会对工件的切割精度造成影响。
3、因此,本领域需要一种定位方式来解决上述问题。
技术实现思路
1、本申请旨在解决上述技术问题,即解决工件台定位精度差的问题。
2、第一方面,本申请提供一种定位组件,其包括:
3、定位块,所述定位块上具有定位面,所述定位面用于接触工件台的侧面;以及
4、多个位置传感器,多个所述位置传感器并排设置,每个所述位置传感器用于检测其感应端距离工件台的所述侧面的距离,以确保所述定位面与所述侧面完全贴合。
5、在采用上述技术方案的情况下,通过位置传感器对工件台的位置进行检测,从而确定工件台处于设定位置或倾斜状态,同时根据位置传感器反馈的信息,能够对工件台进行迅速调整,从而能够保证工件台的位置精度,保证工件能够稳定、精准地切割,提高了工件的切割精度。
6、可选地,多个所述位置传感器的感应端的连线平行于所述定位面。
7、可选地,所述位置传感器的数量为两个。
8、在采用上述技术方案的情况下,根据两点确定一条直线的原理,通过两个位置传感器即可判断工件台的状态。
9、可选地,所述位置传感器为光学距离传感器、线性接近传感器、红外距离传感器或超声波距离传感器。
10、在采用上述技术方案的情况下,可根据实际生产需求选择合适的传感器类型。
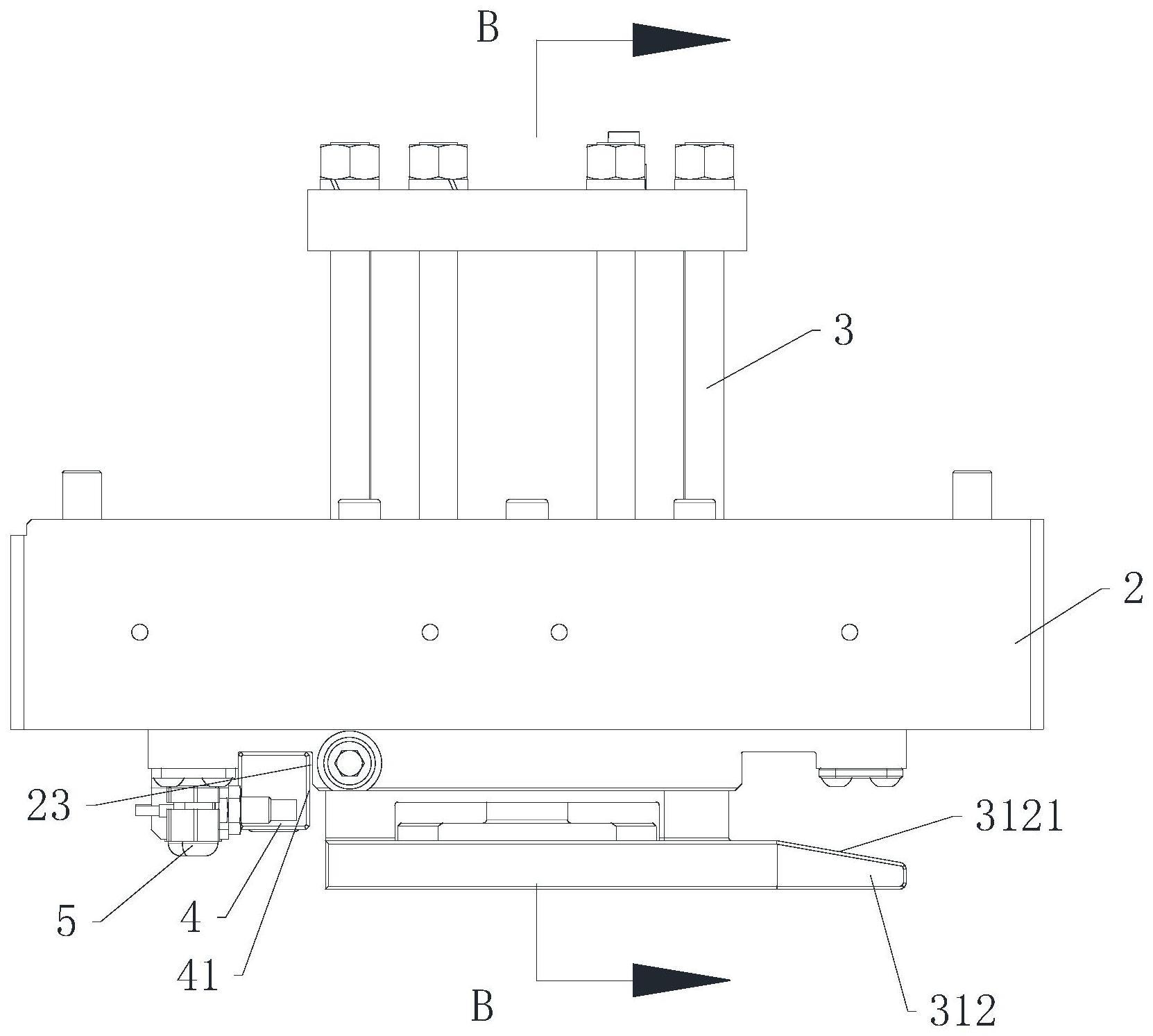
11、第二方面,本申请提供一种装夹机构,其包括装夹底座、设置于所述装夹底座上的驱动器、连接于所述驱动器输出端的夹持部以及第一方面中任一项所述的定位组件,所述定位块设置于所述装夹底座上。
12、可选地,所述装夹底座上开设有凹槽,所述定位块固定设置于所述凹槽内。
13、在采用上述技术方案的情况下,凹槽能够对定位块的安装起到定位作用,进而有利于将定位块的快速、精准地安装至装夹底座上。
14、可选地,所述位置传感器安装于所述装夹底座上。
15、可选地,所述位置传感器的数量为两个,两个所述位置传感器分别位于所述定位块的两侧。
16、可选地,所述装夹底座上设置有安装支座,所述位置传感器可拆卸连接于所述安装支座上。
17、可选地,所述位置传感器安装于所述定位块上。
18、第三方面,本申请提供一种进给单元,其包括第二方面中任一项所述的装夹机构。
19、第四方面,本申请提供一种线切割机,其包括第三方面中所述的进给单元。
技术特征:
1.一种定位组件,用于定位工件台,其特征在于,包括:
2.根据权利要求1所述的定位组件,其特征在于,多个所述位置传感器的感应端的连线平行于所述定位面。
3.根据权利要求1所述的定位组件,其特征在于,所述位置传感器的数量为两个。
4.根据权利要求1至3中任一项所述的定位组件,其特征在于,所述位置传感器为光学距离传感器、线性接近传感器、红外距离传感器或超声波距离传感器。
5.一种装夹机构,其特征在于,所述装夹机构包括装夹底座、设置于所述装夹底座上的驱动器、连接于所述驱动器输出端的夹持部以及权利要求1至4中任一项所述的定位组件,所述定位块设置于所述装夹底座上。
6.根据权利要求5所述的装夹机构,其特征在于,所述装夹底座上开设有凹槽,所述定位块固定设置于所述凹槽内。
7.根据权利要求5所述的装夹机构,其特征在于,所述位置传感器安装于所述装夹底座上。
8.根据权利要求7所述的装夹机构,其特征在于,所述位置传感器的数量为两个,两个所述位置传感器分别位于所述定位块的两侧。
9.根据权利要求7或8所述的装夹机构,其特征在于,所述装夹底座上设置有安装支座,所述位置传感器可拆卸连接于所述安装支座上。
10.根据权利要求5所述的装夹机构,其特征在于,所述位置传感器安装于所述定位块上。
11.一种进给单元,其特征在于,所述进给单元包括权利要求5至10中任一项所述的装夹机构。
12.一种线切割机,其特征在于,所述线切割机包括权利要求11所述的进给单元。
技术总结
本申请涉及线切割技术领域,具体提供一种定位组件、装夹机构、进给单元及线切割机,旨在解决现有线切割机的工件台定位精度差的问题。为此目的,本申请的定位组件包括:定位块,所述定位块上具有定位面,所述定位面用于接触工件台的侧面;以及多个位置传感器,多个所述位置传感器并排设置,每个所述位置传感器用于检测其感应端距离工件台的所述侧面的距离,以确保所述定位面与所述侧面完全贴合。本申请通过位置传感器检测工件台在安装过程中是否处于设定位置,使工件台的安装位置更为精准,从而能够提高工件的切割精度。
技术研发人员:段景波,孙承政,周长发,张毅,李玮渊
受保护的技术使用者:青岛高测科技股份有限公司
技术研发日:20230209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!