一种机器人焊接工装
本技术涉及焊接工装,尤其涉及一种机器人焊接工装。
背景技术:
1、异型钢模板为经济断面钢管模板。包括横断面轮廓非圆形的、等壁厚的、变壁厚的等。如锥形、梯形、螺旋形等。异型钢模板更能适应使用条件的特殊性,节约金属和提高零部件制造的劳动生产率。对异型钢模板通过机器人焊接时,需要使用到工装夹具对其固定。
2、经检索,公告号为cn213380063u的实用新型公开了一种机器人焊接工装,包括底座,所述底座的上侧壁固定连接有固定台,所述固定台的上侧壁设有放置槽,所述固定台的侧壁设有滑槽,所述滑槽内滑动连接有移动杆,所述移动杆的左端固定连接有夹板,上述专利还存在以下不足之处:
3、1、上述机器人焊接工装在对异形件夹持时,会导致被夹持件松动,不能够对被夹持件进行多方位的固定,在焊接时,会导致焊接不牢固,影响异型钢模板的质量;
4、针对上述问题,本实用新型文件提出了一种机器人焊接工装。
技术实现思路
1、本实用新型提供了一种机器人焊接工装,解决了现有技术中存在会导致被夹持件松动,不能够对被夹持件进行多方位的固定,在焊接时,会导致焊接不牢固,影响异型钢模板的质量的缺点。
2、本实用新型提供了如下技术方案:
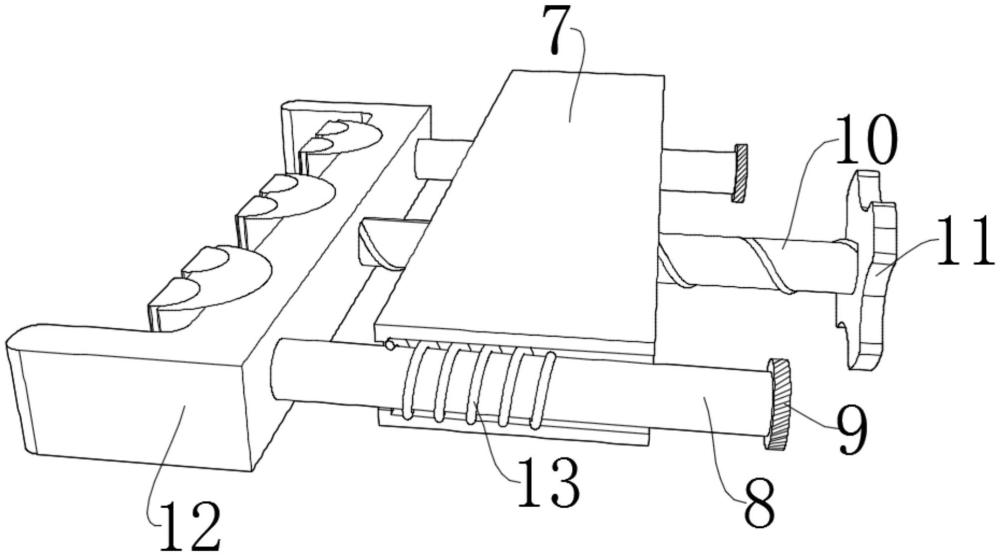
3、一种机器人焊接工装,包括焊接底座,所述焊接底座的上表面固定连接有两个调节板,所述调节板的一侧均设有两个贯穿的滑动孔,所述滑动孔的一端固定连接有限位环,所述滑动孔内均滑动连接有固定柱,两个所述固定柱的一端均固定连接有固定板,所述调节板的一侧均螺纹连接有第二螺杆,所述第二螺杆的一端均与固定板转动连接,所述滑动孔内均设有弹簧,多组夹持组件,多组所述夹持组件分别设置在固定板的一侧,多组所述夹持组件用于异型钢模板焊接时的固定。
4、在一种可能的设计中,所述夹持组件包括多个半圆形的第一转动块,所述第一转动块的一侧均设有两个半圆形的第二转动块,所述第一转动块和第二转动块的一侧均固定连接有滑块,多个所述第一转动块和固定板的一侧均设有与滑块16相匹配的圆弧状的滑槽,所述滑块均在滑槽内滑动连接。
5、在一种可能的设计中,所述焊接底座的上表面固定连接有支撑柱,所述支撑柱的一侧螺纹连接有贯穿的第一螺杆,所述第一螺杆的底部转动连接有加固板。
6、在一种可能的设计中,所述限位环的直径小于滑动孔的直径,所述弹簧的一端与限位环的一侧固定连接。
7、在一种可能的设计中,所述焊接底座的底部固定连接有多个地脚。
8、在一种可能的设计中,所述固定柱的一端均固定连接有限位柱。
9、在一种可能的设计中,所述第二螺杆的一端均固定连接有手柄。
10、在一种可能的设计中,所述焊接底座的上表面固定连接有两个档条。
11、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本实用新型。
12、本实用新型中,通过固定板的设置,两个固定板将异型钢模板固定在一起,固定柱在滑动孔内活动,两个固定柱带动固定板上下摆动,能够将固定板更好的与异型钢模板接触并固定;
13、本实用新型中,通过夹持组件的设置,多个第一转动块在固定板上转动,每个第一转动块的一侧转动有两个第二转动块,能够进一步对异型钢模板固定,防止异型钢模板活动;
14、本实用新型中,通过加固板的设置,调节第一螺杆带动加固板的升降,便于对异型钢模板的上表面进行固定,对异型钢模板进行多方位的固定,能够提高异型钢模板的稳定性,便于焊接。
15、本实用新型中,两个固定柱带动固定板上下摆动,能够将固定柱更好的与异型钢模板接触并固定,每个第一转动块的一侧转动有两个第二转动块,能够进一步对异型钢模板固定,防止异型钢模板活动,调节第一螺杆,便于对异型钢模板的上表面进行固定。
技术特征:
1.一种机器人焊接工装,其特征在于,包括:焊接底座(1),所述焊接底座(1)的上表面固定连接有两个调节板(7),所述调节板(7)的一侧均设有两个贯穿的滑动孔(18),多个所述滑动孔(18)的一端均固定连接有限位环(17),所述滑动孔(18)内均滑动连接有固定柱(8),两个所述固定柱(8)的一端均固定连接有固定板(12),所述调节板(7)的一侧均螺纹连接有贯穿的第二螺杆(10),所述第二螺杆(10)均与固定板(12)的一侧转动连接,所述滑动孔(18)内均设有弹簧(13),多个所述弹簧(13)均滑动连接在固定柱(8)的圆周外壁;
2.根据权利要求1所述的一种机器人焊接工装,其特征在于,所述夹持组件包括多个半圆形的第一转动块(14),多个所述第一转动块(14)的一侧均设有两个半圆形的第二转动块(15),所述第一转动块(14)和第二转动块(15)的一侧均固定连接有滑块(16),多个所述第一转动块(14)和固定板(12)的一侧均设有与滑块(16)相匹配的圆弧状的滑槽,所述滑块(16)均在滑槽内滑动连接。
3.根据权利要求1所述的一种机器人焊接工装,其特征在于,所述焊接底座(1)的上表面固定连接有支撑柱(2),所述支撑柱(2)的一侧螺纹连接有贯穿的第一螺杆(3),所述第一螺杆(3)的底部转动连接有加固板(4)。
4.根据权利要求1-3中任意一项所述的一种机器人焊接工装,其特征在于,所述限位环(17)的直径小于滑动孔(18)的直径,所述弹簧(13)的一端与限位环(17)的一侧固定连接。
5.根据权利要求1所述的一种机器人焊接工装,其特征在于,所述焊接底座(1)的底部固定连接有多个地脚(6)。
6.根据权利要求1所述的一种机器人焊接工装,其特征在于,所述固定柱(8)的一端均固定连接有限位柱(9)。
7.根据权利要求1所述的一种机器人焊接工装,其特征在于,所述第二螺杆(10)的一端均固定连接有手柄(11)。
8.根据权利要求1所述的一种机器人焊接工装,其特征在于,所述焊接底座(1)的上表面固定连接有两个档条(5)。
技术总结
本技术属于焊接工装领域,尤其是一种机器人焊接工装,针对现有的会导致被夹持件松动,不能够对被夹持件进行多方位的固定,在焊接时,会导致焊接不牢固,影响异型钢模板的质量的问题,现提出如下方案,其包括焊接底座,所述焊接底座的上表面固定连接有两个调节板,所述调节板的一侧均设有两个贯穿的滑动孔,所述滑动孔的一端固定连接有限位环,本技术中,两个固定柱带动固定板上下摆动,能够将固定柱更好的与异型钢模板接触并固定,每个第一转动块的一侧转动有两个第二转动块,能够进一步对异型钢模板固定,防止异型钢模板活动,调节第一螺杆,便于对异型钢模板的上表面进行固定。
技术研发人员:冯双林,程丽红,苏雪梅,邓火生,邓开豪
受保护的技术使用者:广西工业职业技术学院
技术研发日:20230303
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!