一种IGBT自动焊接系统的制作方法
本技术涉及igbt自动焊接设备,具体涉及一种igbt自动焊接系统。
背景技术:
1、igbt兼有mosfet的高输入阻抗和gtr的低导通压降两方面的优点,在综合性能方面占有明显优势,非常适合应用于直流电压为600v及以上的变流系统,特别在新能源汽车领域,在具体应用方面,一般将多个igbt芯片按照特定的电路形式进行组合,如半桥、全桥等,可以有效减少外部电路连接的复杂性,并且多个igbt芯片焊接在同一个金属基板(也就是dbc)上,等于是在独立的散热器与igbt芯片之间增加了一块均热板,可以使得igbt工作更加可靠。
2、然而,现有igbt的dbc贴锡组装由于国内厂商产能需求和核心工艺的掌握不太全面,大多以人工或半自动设备组装为主,往往导致产品生产效率过低的问题,严重制约新能源汽车产业的发展。
技术实现思路
1、为此,本实用新型提供一种igbt自动焊接系统,采用电气自动化的方式代替人工,以解决产品生产效率过低的问题。
2、为了实现上述目的,本实用新型提供如下技术方案:
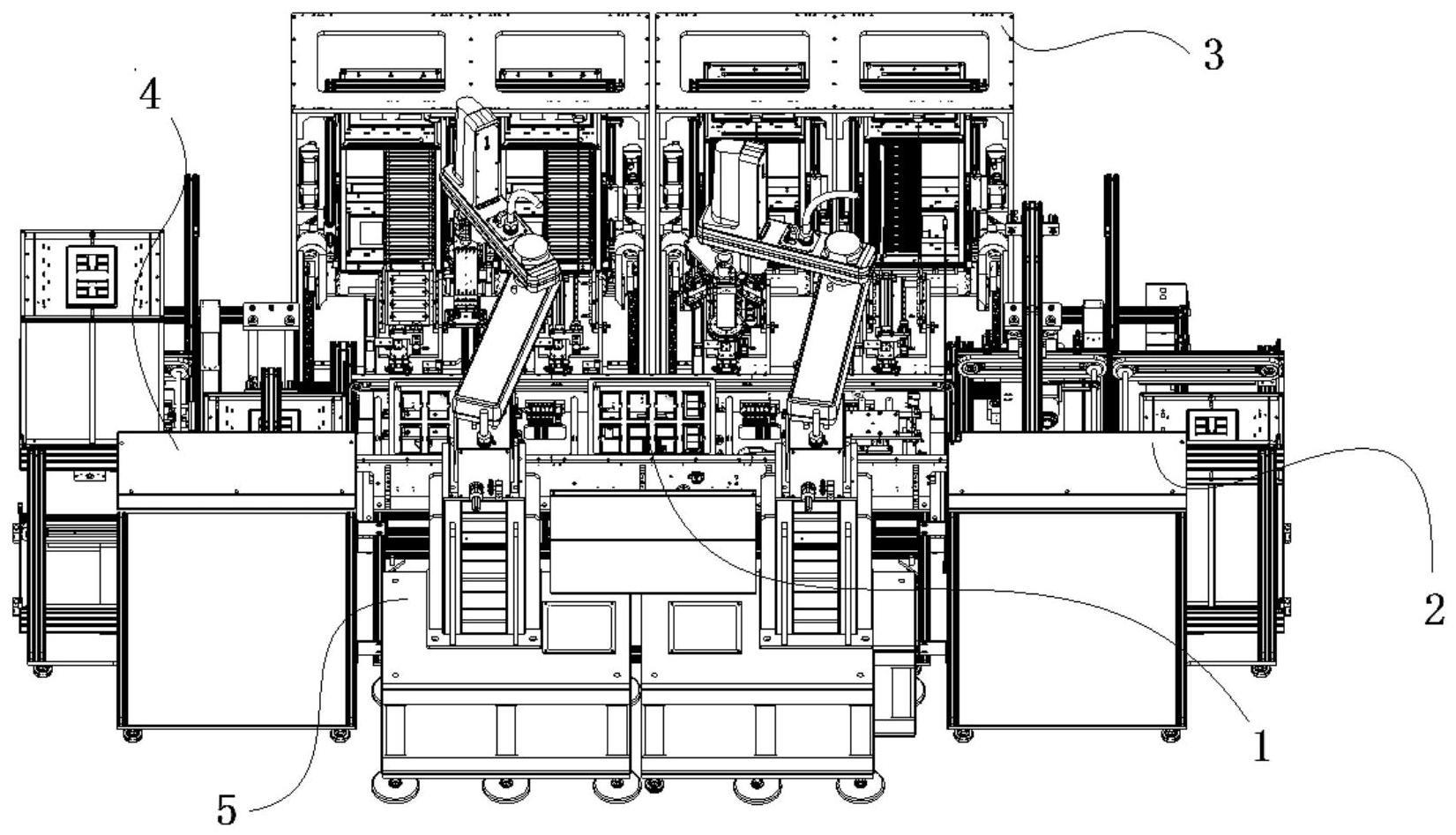
3、本实用新型公开了一种igbt自动焊接系统,包括:
4、流水工作台,进料端设置有dbc上料器,出料端设置有dbc卸料器,所述dbc上料器与dbc卸料器结构相同;
5、igbt元件上料器,设置在所述流水工作台一侧,所述流水工作台另一侧设置有工作组件;
6、装配组件,装配在所述工作组件上,包括夹爪、驱动机构和升降气缸,所述工作组件与所述升降气缸的端部传动连接,所述升降气缸的活塞杆与装有夹爪的驱动机构相连;
7、焊接组件,包括安装架、电烙铁和吸锡器:
8、安装架顶部与工作组件相连,底部安装有所述电烙铁,侧面装有吸锡器;
9、其中,所述工作组件包括不少于两台机器人,其中至少有一台所述机器人安装有所述焊接组件或所述装配组件,且通过所述装配组件安装igbt元件到dbc金属基板上,并通过所述焊接组件焊接固定。
10、进一步的,所述igbt元件上料器包括:
11、机壳,内部设置有第一升降机构,所述第一升降机构带动叠放的igbt元件竖直上下移动;
12、承接平台,前端设置有夹持机构,后端与所述机壳连通,所述夹持机构适于将机壳的igbt元件夹取到夹持机构上。
13、进一步的,所述机器人包括基座、机械臂和旋转伸缩电机,所述基座设置在机械臂底部,所述机械臂的顶部安装有旋转伸缩电机。
14、进一步的,所述机械臂包括一级伺服电机、二级伺服电机、第一连接臂和第二连接臂,所述旋转伸缩电机装配在第一连接臂首端,所述第一连接臂尾端与第二连接臂的首端铰接,所述第二连接臂的首端安装有与第一连接臂转动连接的二级伺服电机,所述第二连接臂的尾端与一级伺服电机转动连接。
15、进一步的,所述焊接组件上以及装配组件上均设置有工业相机。
16、进一步的,所述流水工作台包括:
17、安装支架,顶部设置有传送带,所述传送带内沿长度方向设置有第一托举平台、第二托举平台和第三托举平台;和
18、取料器,设置在所述安装支架端部,用于将dbc上料器中的dbc金属基板取出放置在传送带上。
19、进一步的,所述dbc卸料器包括:
20、装具,内部叠放有若干层dbc金属基板;
21、输送机架,顶部和底部均设置有输送带,侧部设置有第二升降机构;
22、转运托盘,底部与第二升降机构传动连接,顶部设置有装具。
23、进一步的,所述转运托盘包括:
24、底托,与所述第二升降机构传动连接,顶部固定设置有安装框;
25、转运传送带,装配在所述底托上,且与装具摩擦传动连接;
26、限位开关,固定设置在所述安装框上。
27、本实用新型具有如下优点:
28、本实用新型利用dbc上料器和dbc下料器进行dbc金属基板的移送,igbt元件上料器进行供料,在流水工作台上完成操作,在此过程中,通过机械臂代替人工将igbt元件焊接到dbc金属基板上,并且,通过工业相机(ccd)对元件的装配—查验—焊接等一系列工序进行全程定位和监控,以保证最终成品的质量,相比较现有技术,可完全代替人工,以解决产品生产效率过低的问题。
技术特征:
1.一种igbt自动焊接系统,其特征在于,包括:
2.如权利要求1所述的igbt自动焊接系统,其特征在于,所述igbt元件上料器(3)包括:
3.如权利要求1所述的igbt自动焊接系统,其特征在于,所述机器人包括基座(5.1)、机械臂(5.2)和旋转伸缩电机(5.3),所述基座(5.1)设置在机械臂(5.2)底部,所述机械臂(5.2)的顶部安装有旋转伸缩电机(5.3)。
4.如权利要求3所述的igbt自动焊接系统,其特征在于,所述机械臂(5.2)包括一级伺服电机(5.21)、二级伺服电机(5.22)、第一连接臂(5.23)和第二连接臂(5.24),所述旋转伸缩电机(5.3)装配在第一连接臂(5.23)首端,所述第一连接臂(5.23)尾端与第二连接臂(5.24)的首端铰接,所述第二连接臂(5.24)的首端安装有与第一连接臂(5.23)转动连接的二级伺服电机(5.22),所述第二连接臂(5.24)的尾端与一级伺服电机(5.21)转动连接。
5.如权利要求1所述的igbt自动焊接系统,其特征在于,所述焊接组件(7)上以及装配组件(6)上均设置有工业相机(8)。
6.如权利要求1所述的igbt自动焊接系统,其特征在于,所述流水工作台(1)包括:
7.如权利要求1所述的igbt自动焊接系统,其特征在于,所述dbc卸料器(2)包括:
8.如权利要求7所述的igbt自动焊接系统,其特征在于,所述转运托盘(2.3)包括:
技术总结
本技术公开了一种IGBT自动焊接系统,属于IGBT自动焊接设备技术领,包括流水工作台、装配组件、焊接组件IGBT和元件上料器。流水工作台的进料端设置有DBC上料器,出料端设置有DBC卸料器,DBC上料器与DBC卸料器结构相同,可以起到持续向流水工作台进料和收料的作用,焊接装配的工序全部在流水工作台上完成。另一方面,IGBT元件上料器则设置在流水工作台一侧,流水工作台另一侧设置有工作组件,工作组件需要将IGBT装配并焊接到DBC金属基板上,在此基础上,焊接工序通过装配组件完成,焊接工序由焊接组件完成。同时利用工业相机对焊接以及装配过程进行定位和监控,从而确保产品质量,相比较现有技术,可以完全代替人工,显著提高产品质量。
技术研发人员:宋金聚,王国华
受保护的技术使用者:和利时(苏州)自控技术有限公司
技术研发日:20230313
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!