一种激光焊接机器人用的多方向焊接头的制作方法
本技术涉及激光焊接机器人,具体为一种激光焊接机器人用的多方向焊接头。
背景技术:
1、激光焊接机器人,又常称为激光焊机、镭射焊机,是激光材料加工用的机器,激光焊接是利用高能量的激光脉冲对材料进行微小区域内的局部加热,激光辐射的能量通过热传导向材料的内部扩散,将材料熔化后形成特定熔池以达到焊接的目的,激光焊接机器人能够精准的完成焊接工作,进而常用于精密焊接工作,激光焊接机器人设备基本上具有焊接速度快、焊接质量高、连续工作时间长、能够经受严苛的焊接环境、工作稳定性高、使用寿命长等优点,能够满足对多轴设备进行激光焊接的使用需求。
2、公开号:cn214322188u的中国专利,公开了一种高工作效率的激光焊接机器人,包括基座、净化箱、过滤网、摆臂和支撑臂,所述基座的顶端设有支撑臂,且支撑臂的顶端设有摆臂,并且摆臂的底端安装有铰接轴,摆臂通过铰接轴与支撑臂相铰接,所述摆臂的顶端安装有集烟罩,且集烟罩的底端安装有激光头,并且激光头下方的摆臂外壁上安装有主支架,所述主支架一侧的支撑臂外壁上安装有辅支架,且辅支架一侧的支撑臂外壁上安装有卡座,并且卡座的外壁上安装有驱动气缸,所述驱动气缸的顶端设有驱动架,且驱动架下方的基座外壁上安装有控制面板。
3、上述专利中存在以下问题:
4、现有的激光焊接机器人其焊接头并不能单独进行方向调节,而是利用工业机器人的多个电机进行一系列合成运动,来满足焊接头的角度调节,而在一些位置狭小的位置,由于焊接头需要依靠工业机器人才能进行调整,其工业机器人自身移动受限,不便于进行局部微调,进而影响焊接头的加工范围,导致加工精度变低,影响加工时的效率。鉴于此,我们提出一种激光焊接机器人用的多方向焊接头。
技术实现思路
1、本实用新型的目的在于提供一种激光焊接机器人用的多方向焊接头,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种激光焊接机器人用的多方向焊接头,包括:
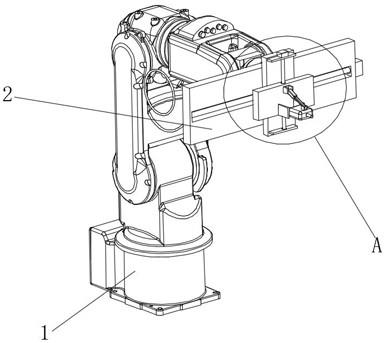
4、激光焊接机器人本体,所述激光焊接机器人本体的一端固定安装有安装板,所述安装板的一侧滑动连接有移动板;
5、横向移动组件,所述横向移动组件设置在安装板上,且用于带动移动板移动;
6、升降板,所述升降板滑动连接在移动板的一侧,所述升降板的一侧固定安装有两个侧板,两个所述侧板之间转动连接有同一个激光焊接头;
7、升降组件,所述升降组件设置在移动板上,且用于带动升降板移动;
8、调节组件,所述调节组件设置在升降板上,且用于带动激光焊接头在两个侧板之间转动。
9、优选的,所述横向移动组件包括第一丝杆,所述第一丝杆转动连接在安装板内,所述第一丝杆上螺纹连接有第一螺纹套,所述第一螺纹套滑动连接在安装板内,所述第一螺纹套的一端与移动板的一侧固定连接。
10、优选的,所述安装板的一侧固定安装有电机a,所述电机a输出轴的一端与第一丝杆的一端固定连接。
11、优选的,所述升降组件包括两个连接板,两个所述连接板固定安装在升降板的一侧,所述升降板上开设有螺纹孔,两个所述连接板之间转动连接有同一个第二丝杆,所述第二丝杆与螺纹孔螺纹连接,其中一个所述连接板的顶面固定安装有电机b,所述电机b输出轴的底端与第二丝杆的顶端固定连接。
12、优选的,所述调节组件包括第一连接座,所述第一连接座固定安装在升降板的一侧,所述第一连接座内转动连接有电动推杆,所述激光焊接头的顶面固定安装有第二连接座,所述电动推杆的底端转动连接在第二连接座内。
13、与现有技术相比,本实用新型的有益效果是:
14、该激光焊接机器人用的多方向焊接头,在激光焊接头使用时,可通过横向移动组件带动移动板在安装板的一侧移动,从而实现激光焊接头的横向移动调节,实现激光焊接头的横向位置微调,方便激光焊接头进行加工,并且在激光焊接头横向位置调节后,可通过升降组件来调节激光焊接头的一定高度,进一步的增强了激光焊接头的调节性,增强了实用性。
15、该激光焊接机器人用的多方向焊接头,根据加工工件的位置可启动电动推杆,通过第一连接座、第二连接座的配合会带动激光焊接头在两个侧板之间转动,从而实现激光焊接头的上下角度调节,增强了激光焊接头在微调的角度,使激光焊接头更加适合狭小空间进行加工,增强了激光焊接头加工时的精准性。
技术特征:
1.一种激光焊接机器人用的多方向焊接头,其特征在于,包括:
2.根据权利要求1所述的激光焊接机器人用的多方向焊接头,其特征在于:所述横向移动组件包括第一丝杆(9),所述第一丝杆(9)转动连接在安装板(2)内,所述第一丝杆(9)上螺纹连接有第一螺纹套(10),所述第一螺纹套(10)滑动连接在安装板(2)内,所述第一螺纹套(10)的一端与移动板(3)的一侧固定连接。
3.根据权利要求2所述的激光焊接机器人用的多方向焊接头,其特征在于:所述安装板(2)的一侧固定安装有电机a(11),所述电机a(11)输出轴的一端与第一丝杆(9)的一端固定连接。
4.根据权利要求1所述的激光焊接机器人用的多方向焊接头,其特征在于:所述升降组件包括两个连接板(12),两个所述连接板(12)固定安装在升降板(16)的一侧,所述升降板(16)上开设有螺纹孔(13),两个所述连接板(12)之间转动连接有同一个第二丝杆(14),所述第二丝杆(14)与螺纹孔(13)螺纹连接,其中一个所述连接板(12)的顶面固定安装有电机b(15),所述电机b(15)输出轴的底端与第二丝杆(14)的顶端固定连接。
5.根据权利要求1所述的激光焊接机器人用的多方向焊接头,其特征在于:所述调节组件包括第一连接座(6),所述第一连接座(6)固定安装在升降板(16)的一侧,所述第一连接座(6)内转动连接有电动推杆(8),所述激光焊接头(5)的顶面固定安装有第二连接座(7),所述电动推杆(8)的底端转动连接在第二连接座(7)内。
技术总结
本技术涉及激光焊接机器人技术领域,具体为一种激光焊接机器人用的多方向焊接头,包括:激光焊接机器人本体,所述激光焊接机器人本体的一端固定安装有安装板,所述安装板的一侧滑动连接有移动板;横向移动组件,所述横向移动组件设置在安装板上,且用于带动移动板移动;升降板,所述升降板滑动连接在移动板的一侧,在激光焊接头使用时,可通过横向移动组件带动移动板在安装板的一侧移动,从而实现激光焊接头的横向移动调节,实现激光焊接头的横向位置微调,方便激光焊接头进行加工,并且在激光焊接头横向位置调节后,可通过升降组件来调节激光焊接头的一定高度,进一步的增强了激光焊接头的调节性,增强了实用性。
技术研发人员:张义展,李兆阳,连露颖
受保护的技术使用者:洛阳佳新智能科技有限公司
技术研发日:20230531
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!