一种多用途锻造模具自动化转运及装卸装置的制作方法
本技术涉及一种锻造模具运输装置,具体地说是一种改进的多功能锻造模具自动化转运及装卸装置。
背景技术:
1、在锻造自动化生产线中,由于锻造模具重量特别重,锻造模具转运及装卸模极其困难,用叉车转运及装卸锻造模具费时费力,而且定位不准确,这就成为锻造自动化生产线瓶颈问题。
2、锻造生产自动化可以从三个方面阐述:1、专用设备自动化也就是自动锻压机,2、前后工序产品或物料生产流转自动化,3、模具转运装卸自动化,上述三者密不可分。专用设备自动化毋庸置疑;产品或物料生产流转自动化可以通过轨道或挂具的衔接和人机的转运或自动化设计机构来实现;模具转运及装卸自动化机属于自动化生产线的附属机构的范围,其转运装卸自动化有专门设计的操作机,其精巧程度和结构也都很复杂,其实国内很多企业对这方面重视程度不够。据了解欧美发达企业对其非常重视,许多设计出来的机构非常实用巧妙,基于上述原因特设计了一种改进的多用途锻造模具自动化转运及装卸装置。
技术实现思路
1、为解决上述问题,本实用新型的目的在于提供一种多用途锻造模具自动化转运及装卸模具装置,进一步提高锻造自动化生产线自动化程度。
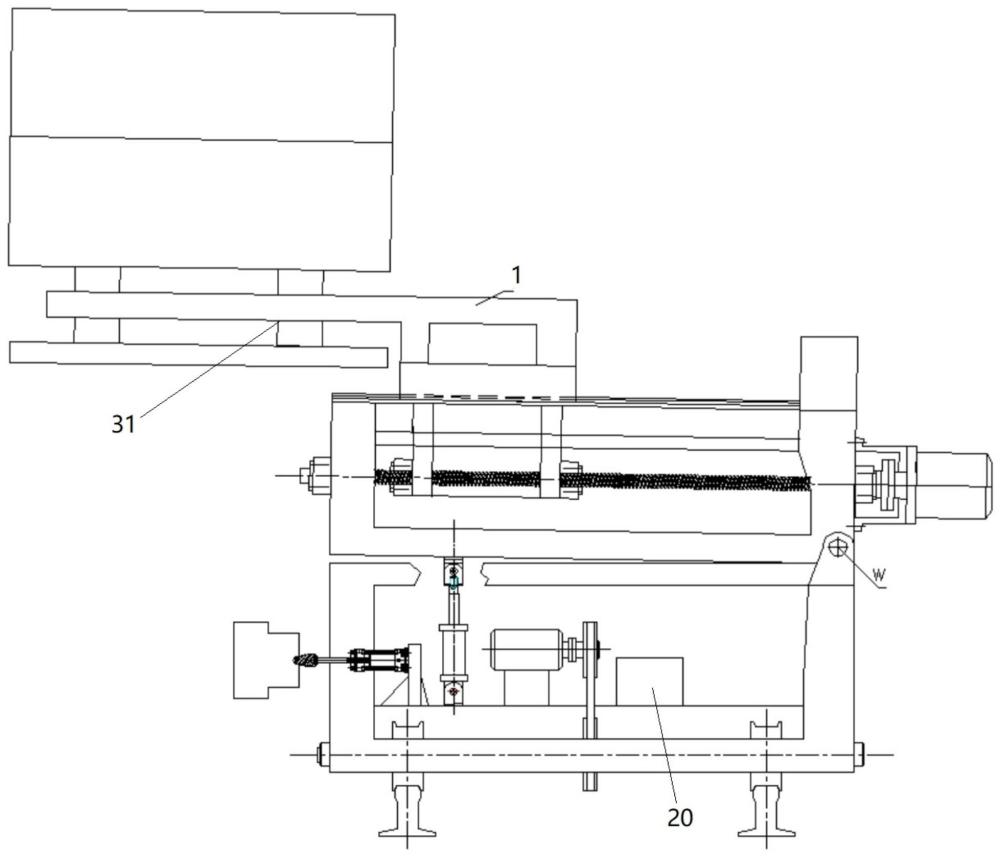
2、根据本实用新型的一方面,提供一种多用途锻造模具自动化转运及装卸装置,包括:彼此并排连接的左侧模块和右侧模块,在由左侧模块和右侧模块各自具有或共用的整体基础框架的一侧固定有定位液压缸,该定位液压缸的活塞杆头部设有定位销,左侧模块和右侧模块各自具有:用于带动模具运动的模具拖杆,与模具拖杆一体连接的模具拖杆下框架,后部侧经由设置于整体基础框架两侧的旋转轴与整体基础枢转连接的直线导轨下框架,固定在直线导轨下框架上通过固定导向丝母与模具拖杆下框架螺旋连接的导向丝杠,固定设置于直线导轨下框架上的直线导轨,用于旋转带动导向丝杠以旋转带动模具拖杆在直线导轨上运动的第一伺服电机,通过液压缸铰链及铰链座与整体基础框架上方连接和通过铰链及铰链座与直线导轨下框架下方的前部侧连接的液压缸,固定在整体基础框架上的第二伺服电机,由第二伺服电机驱动的第一皮带轮,由第一皮带轮通过齿形皮带带动旋转的第二皮带轮,由第二皮带轮旋转带动的车轮轴,以及由车轮轴旋转带动的车轮。
3、优选地,液压缸的液压缸活塞杆与铰链及铰链座连接。
4、优选地,在直线导轨下框架上设置有配重块。
5、优选地,定位销用于插入压力机对应的定位套以用于在轨道上的定位。
6、优选地,第一伺服电机通过光电开关和plc系统控制来经由第一联轴器带动导向丝杠旋转。
7、优选地,所述的多用途锻造模具自动化转运及装卸装置还设置有用于车轮进退的轨道。
8、优选地,所述的多用途锻造模具自动化转运及装卸装置还设置有用于控制车轮进退的地面感应器。
9、本新型装置能实现锻造轮毂的新上机锻造模具装机、转运、旧下机模具卸机、转运、放回锻造模具安装平台库的自动化。整个装置控制过程只需要手控开关和简单的plc系统即可实现控制,价格便宜、维修成本低,便于工人操作、实用性强,减少了人工操作的劳动强度。
技术特征:
1.一种多用途锻造模具自动化转运及装卸装置,其特征在于,包括:彼此并排连接的左侧模块和右侧模块,在由左侧模块和右侧模块各自具有或共用的整体基础框架的一侧固定有定位液压缸,该定位液压缸的活塞杆头部设有定位销,左侧模块和右侧模块各自具有:用于带动模具运动的模具拖杆,与模具拖杆一体连接的模具拖杆下框架,后部侧经由设置于整体基础框架两侧的旋转轴与整体基础枢转连接的直线导轨下框架,固定在直线导轨下框架上通过固定导向丝母与模具拖杆下框架螺旋连接的导向丝杠,固定设置于直线导轨下框架上的直线导轨,用于旋转带动导向丝杠以旋转带动模具拖杆在直线导轨上运动的第一伺服电机,通过液压缸铰链及铰链座与整体基础框架上方连接和通过铰链及铰链座与直线导轨下框架下方的前部侧连接的液压缸,固定在整体基础框架上的第二伺服电机,由第二伺服电机驱动的第一皮带轮,由第一皮带轮通过齿形皮带带动旋转的第二皮带轮,由第二皮带轮旋转带动的车轮轴,以及由车轮轴旋转带动的车轮。
2.根据权利要求1所述的多用途锻造模具自动化转运及装卸装置,其特征在于,液压缸的液压缸活塞杆与铰链及铰链座连接。
3.根据权利要求1所述的多用途锻造模具自动化转运及装卸装置,其特征在于,在直线导轨下框架上设置有配重块。
4.根据权利要求1所述的多用途锻造模具自动化转运及装卸装置,其特征在于,定位销用于插入压力机对应的定位套以用于在轨道上的定位。
5.根据权利要求1所述的多用途锻造模具自动化转运及装卸装置,其特征在于,第一伺服电机通过光电开关和plc系统控制来经由第一联轴器带动导向丝杠旋转。
6.根据权利要求1所述的多用途锻造模具自动化转运及装卸装置,其特征在于,还设置有用于车轮进退的轨道。
7.根据权利要求1所述的多用途锻造模具自动化转运及装卸装置,其特征在于,还设置有用于控制车轮进退的地面感应器。
技术总结
一种多用途锻造模具自动化转运及装卸装置,在左侧模块和右侧模块的整体基础框架的一侧固定有定位液压缸,其活塞杆头部设有定位销,各模块具有:用于带动模具运动的模具拖杆与模具拖杆下框架,后部侧经由设于整体基础框架两侧的旋转轴枢转连接的直线导轨下框架,固定在直线导轨下框架的导向丝杠,设于直线导轨下框架的直线导轨,用于旋转带动导向丝杠以旋转带动模具拖杆在直线导轨上运动的第一伺服电机,通过液压缸铰链及铰链座与整体基础框架上方连接和通过铰链及铰链座与直线导轨下框架下方的前部侧连接的液压缸,固定在整体基础框架的第二伺服电机,由第二伺服电机驱动的车轮轴以及车轮。只需手控开关和PLC系统即可实现控制,便于操作。
技术研发人员:杨金岭,程远,李健,马亮,孙超强,朱晓霆,朱志华,周成,王渭新,黄少兵
受保护的技术使用者:中信戴卡股份有限公司
技术研发日:20230713
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!