一种适配焊接协作机器人的磁力底座的制作方法
本技术涉及机器人磁力底座,具体为一种适配焊接协作机器人的磁力底座。
背景技术:
1、目前在海工钢结构焊接领域主要以人工焊接为主,传统的人工焊接方法有许多不足之处,如人力短缺、焊接缺陷多、人员培训难度大、焊接操作繁琐、工作效率低、用电作业安全隐患以及焊接作业各类职业危害问题等。而随着协作机器人在各行各业的应用推广和发展,为提高海工钢结构焊接的生产效率、施工质量和安全性等方面提供了一套可行的解决方案。但是,现有的焊接协作机器人往往难以快速部署在海工钢结构的不同焊接场景中,影响了焊接协作机器人的灵活适应性和使用效果。因此,针对海工钢结构焊接的特殊要求需要设计了一种快速适配焊接协作机器人的专业磁力底座,帮助焊接协作机器人能够在海工焊接领域有更加广泛的应用。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本实用新型提供一种可快速适配焊接协作机器人的专业磁力底座,针对焊接协作机器人在海洋工程领域平台模块化建造过程中匹配性不强,难以直接应用的情况专门设计,可以同时兼容适配于焊接协作机器人的可移动支架和磁力底座,能够实现焊接协作机器人多位置快速切换部署,确保现场焊接施工作业迅速切换以及便捷操作。
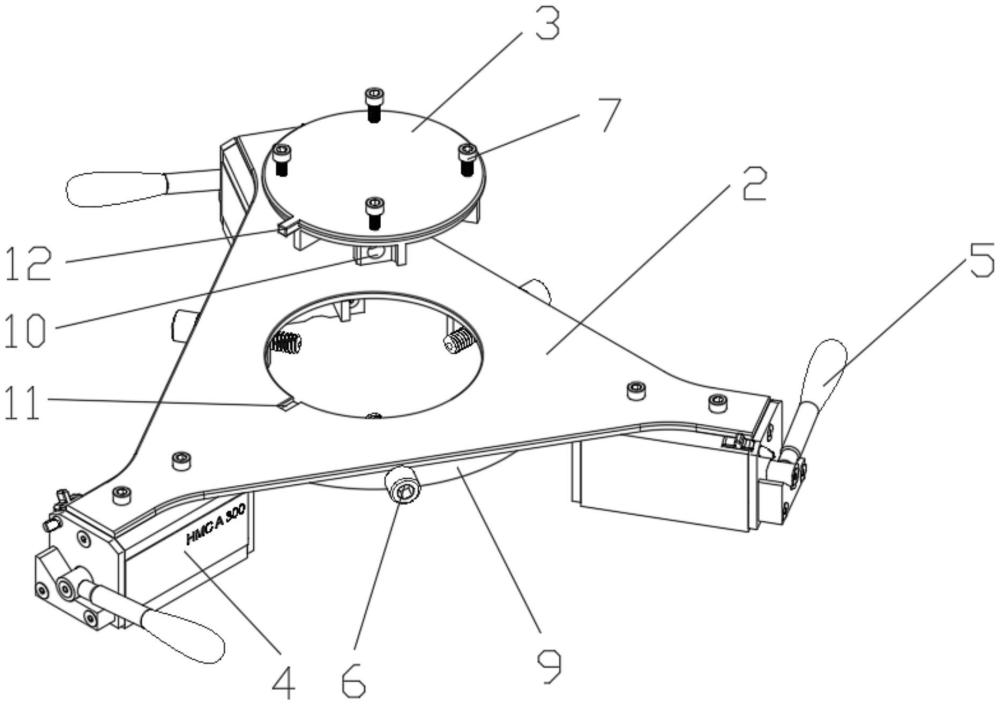
2、为实现上述目的,本实用新型提供如下技术方案:一种适配焊接协作机器人的磁力底座,包括磁力底座支撑架,设于磁力底座支撑架下端的磁力机构,以及设于磁力底座支撑架上的机器人连接机构;
3、所述机器人连接机构用于将焊接协作机器人与磁力底座支撑架固定于一体;
4、所述磁力机构用于将装配机器人的磁力底座磁吸于钢结构甲板上。
5、进一步的,所述磁力机构设有三组,包括固定于磁力底座支撑架下端的磁铁,设于磁铁上的磁性开关手柄。
6、进一步的,所述机器人连接机构包括设于磁力底座支撑架上的连接槽,设于连接槽内的连接盘。
7、进一步的,所述连接槽的外周侧设有若干连接盘固定螺栓。
8、进一步的,所述连接盘的上端面设有若干机器人固定螺栓,所述连接盘的外周侧设有与连接盘固定螺栓匹配的螺栓孔。
9、进一步的,所述连接槽上设有指示槽,所述连接盘上设有指示块,所述指示块设于指示槽内。
10、与现有技术相比,本实用新型的有益效果是:
11、本实用新型适合不同的钢结构焊接场景,操作简便、快速适配,带来了极大的便利性和经济效益。采用多支点稳定支撑和耐高温强磁吸附部件,增加了安全性和稳定性。快装快拆设计,方便协作机器人的快速部署和拆卸安装。底座设计结构简洁,适用范围广泛,可以适配于多种品牌及型号的协作机器人。
技术特征:
1.一种适配焊接协作机器人的磁力底座,其特征在于:包括磁力底座支撑架,设于磁力底座支撑架下端的磁力机构,以及设于磁力底座支撑架上的机器人连接机构;
2.根据权利要求1所述的适配焊接协作机器人的磁力底座,其特征在于:所述磁力机构设有三组,包括固定于磁力底座支撑架下端的磁铁,设于磁铁上的磁性开关手柄。
3.根据权利要求1所述的适配焊接协作机器人的磁力底座,其特征在于:所述机器人连接机构包括设于磁力底座支撑架上的连接槽,设于连接槽内的连接盘。
4.根据权利要求3所述的适配焊接协作机器人的磁力底座,其特征在于:所述连接槽的外周侧设有若干连接盘固定螺栓。
5.根据权利要求3所述的适配焊接协作机器人的磁力底座,其特征在于:所述连接盘的上端面设有若干机器人固定螺栓,所述连接盘的外周侧设有与连接盘固定螺栓匹配的螺栓孔。
6.根据权利要求3所述的适配焊接协作机器人的磁力底座,其特征在于:所述连接槽上设有指示槽,所述连接盘上设有指示块,所述指示块设于指示槽内。
技术总结
本技术涉及机器人磁力底座技术领域,具体为一种适配焊接协作机器人的磁力底座。包括磁力底座支撑架,设于磁力底座支撑架下端的磁力机构,以及设于磁力底座支撑架上的机器人连接机构;所述机器人连接机构用于将焊接协作机器人与磁力底座支撑架固定于一体;所述磁力机构用于将装配机器人的磁力底座磁吸于钢结构甲板上。本技术适合不同的钢结构焊接场景,操作简便、快速适配,带来了极大的便利性和经济效益。采用多支点稳定支撑和耐高温强磁吸附部件,增加了安全性和稳定性。快装快拆设计,方便协作机器人的快速部署和拆卸安装。底座设计结构简洁,适用范围广泛,可以适配于多种品牌及型号的协作机器人。
技术研发人员:李振兴,尹坤坤,童维博,苏利征,宁尚磊,陈宪波,孙庆涛,李文勇,王茂,张强军,潘光远
受保护的技术使用者:青岛武船麦克德莫特海洋工程有限公司
技术研发日:20230810
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!