一种可定位固定夹持焊接的自动化焊接机器人
本技术涉及自动化焊接,具体是一种可定位固定夹持焊接的自动化焊接机器人。
背景技术:
1、现有公开号为cn217647784u公开发布了一种可定位固定夹持焊接的自动化焊接机器人,涉及自动化焊接技术领域,包括输送机构,所述输送机构的顶端靠近输入口处设有调节机构,所述调节机构的底部中心处设有焊接机构,所述输送机构位于调节机构的下方设有夹紧机构,所述调节机构位于输送机构的输出口一端设有检测机构,所述检测机构远离调节机构的一侧设有分拣机构,本实用新型不仅能够实现焊接物品的定位,而且还能智能调节焊接机构,并且在焊接完成后可将焊接的成品根据需要等级进行归类划分,减少人工核验,大大提高了焊接效率和焊接质量。
2、现有技术存在以下不足:上述中的一种可定位固定夹持焊接的自动化焊接机器人,虽然在焊接完成后可将焊接的成品根据需要等级进行归类划分,但是在将产品通过推板推入到分拣箱时,由于传送带此时并不处于静止状态,这样在推动产品时,产品也会跟随传送带进行移动,这样在将产品推入到分拣箱内时就会产生偏差,使得产品不能准确落入到分拣箱内收集,而产品在焊接后在焊接口处会存在废屑,这样在对产品进行检测时,废屑会对焊接口进行遮挡,这样在通过检测摄像头检测时就会不精准,进而影响检测结果。
3、因此,发明一种可定位固定夹持焊接的自动化焊接机器人很有必要。
技术实现思路
1、本实用新型的目的在于提供一种可定位固定夹持焊接的自动化焊接机器人,以解决上述背景技术中提出的问题。
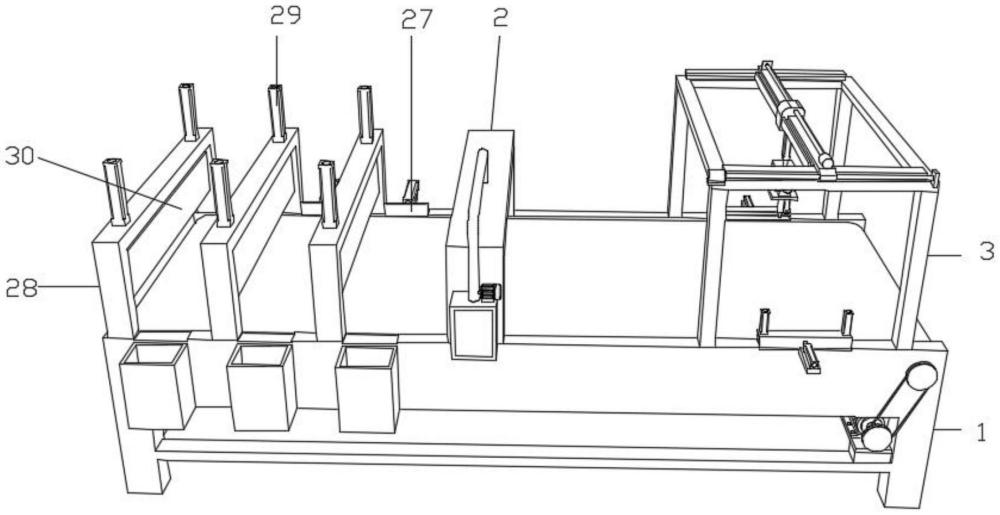
2、为实现上述目的,本实用新型提供如下技术方案:一种可定位固定夹持焊接的自动化焊接机器人,包括输送架、检测装置以及固定架,所述输送架的顶端相对面均转动连接有滚筒,所述滚筒的表面均通过传送带传动连接,所述滚筒的一端贯穿输送架并延伸至输送架的外侧,所述输送架的底端固定连接有伺服电机一,所述伺服电机一的输出端与所述滚筒延伸至输送架外侧的一端之间通过皮带传动连接,所述检测装置的一侧设置有对焊接产生的废屑进行收集的输送装置,所述输送架的顶端设置有阻挡装置,通过阻挡装置对焊接完的产品进行分拣。
3、在本实用新型的一种优选实施方式中,所述固定架的顶端两侧均固定连接有导轨一,两个所述导轨一的顶端之间滑动连接有移动块,所述固定架的顶端一侧固定连接有伺服电机二,所述伺服电机二的输出端固定连接有丝杆一,所述丝杆一的另一端贯穿移动块并延伸至的移动块外侧与固定架顶端另一侧转动连接。
4、在本实用新型的一种优选实施方式中,所述移动块的一侧固定连接有导轨二,所述导轨二的表面滑动连接有滑块,所述移动块的顶端一侧固定连接有伺服电机三,所述伺服电机三的输出端固定连接有丝杆二,所述丝杆二的另一端贯穿滑块并延伸至滑块的外侧并与移动块顶端另一侧转动连接。
5、在本实用新型的一种优选实施方式中,所述滑块的底端固定连接有电动伸缩杆一,所述电动伸缩杆一的输出端固定连接有凹块,所述凹块的内壁转动连接有转轴,所述凹块的外壁一侧固定连接有伺服电机四,所述转轴的一端贯穿凹块并与伺服电机四的输出端固定连接,所述转轴的表面固定连接有焊接装置。
6、在本实用新型的一种优选实施方式中,所述输送架的顶端两侧且位于固定架之间均固定连接有电动伸缩杆二,两个所述电动伸缩杆二的输出端均固定连接有固定框,两个所述固定框的顶端两侧均固定连接有电动伸缩杆三,所述电动伸缩杆三的输出端贯穿固定框并延伸至固定框的外侧,所述电动伸缩杆三的输出端之间固定连接有抵板。
7、在本实用新型的一种优选实施方式中,所述输送装置包括:管道,所述检测装置的一侧固定连接有收集箱,所述管道固定安装在收集箱上,所述管道的另一端贯穿检测装置并延伸至检测装置的外侧,管道延伸至检测装置外侧的一端固定连接有吸尘嘴。
8、在本实用新型的一种优选实施方式中,所述阻挡装置包括:挡板,所述输送架的顶端远离固定架的一侧固定连接有电动伸缩杆四,所述电动伸缩杆四的输出端固定连接有推板,所述输送架的顶端靠近电动伸缩杆四的一侧固定连接有连接架。
9、在本实用新型的一种优选实施方式中,所述连接架的顶端两侧均固定连接有电动伸缩杆五,两个所述电动伸缩杆五的输出端均贯穿连接架并延伸至连接架的外侧,所述挡板固定安装在两个电动伸缩杆五的输出端上。
10、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
11、有益效果:
12、通过在现有的技术上进行改进,通过设置有输送装置以及阻挡装置,在产品输送到检测装置下方时,在收集箱顶部的吸尘泵就会开始工作,通过吸尘嘴将焊接口出的废屑吸入并通过管道输送到收集箱内部进行收集,进而使得检测装置能够精准检测并控制相对应的电动伸缩杆五启动,使得电动伸缩杆五驱动挡板下降将产品进行阻挡,然后启动电动伸缩杆四驱动推板将产品推入到分拣箱内收集,通过设置输送装置能够有效的对产品焊接口的废屑进行收集,通过设置阻挡装置能够有效的对产品在分拣时进行阻挡,使得产品能够准确的落入到分拣箱内收集。
技术特征:
1.一种可定位固定夹持焊接的自动化焊接机器人,包括输送架(1)、检测装置(2)以及固定架(3),所述输送架(1)的顶端相对面均转动连接有滚筒(4),所述滚筒(4)的表面均通过传送带(5)传动连接,所述滚筒(4)的一端贯穿输送架(1)并延伸至输送架(1)的外侧,所述输送架(1)的底端固定连接有伺服电机一(6),所述伺服电机一(6)的输出端与所述滚筒(4)延伸至输送架(1)外侧的一端之间通过皮带传动连接,其特征在于,所述检测装置(2)的一侧设置有对焊接产生的废屑进行收集的输送装置,所述输送架(1)的顶端设置有阻挡装置,通过阻挡装置对焊接完的产品进行分拣。
2.根据权利要求1所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述固定架(3)的顶端两侧均固定连接有导轨一(7),两个所述导轨一(7)的顶端之间滑动连接有移动块(8),所述固定架(3)的顶端一侧固定连接有伺服电机二(9),所述伺服电机二(9)的输出端固定连接有丝杆一(10),所述丝杆一(10)的另一端贯穿移动块(8)并延伸至的移动块(8)外侧与固定架(3)顶端另一侧转动连接。
3.根据权利要求2所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述移动块(8)的一侧固定连接有导轨二(11),所述导轨二(11)的表面滑动连接有滑块(12),所述移动块(8)的顶端一侧固定连接有伺服电机三(13),所述伺服电机三(13)的输出端固定连接有丝杆二(14),所述丝杆二(14)的另一端贯穿滑块(12)并延伸至滑块(12)的外侧并与移动块(8)顶端另一侧转动连接。
4.根据权利要求3所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述滑块(12)的底端固定连接有电动伸缩杆一(15),所述电动伸缩杆一(15)的输出端固定连接有凹块(16),所述凹块(16)的内壁转动连接有转轴(17),所述凹块(16)的外壁一侧固定连接有伺服电机四(18),所述转轴(17)的一端贯穿凹块(16)并与伺服电机四(18)的输出端固定连接,所述转轴(17)的表面固定连接有焊接装置(19)。
5.根据权利要求1所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述输送架(1)的顶端两侧且位于固定架(3)之间均固定连接有电动伸缩杆二(20),两个所述电动伸缩杆二(20)的输出端均固定连接有固定框(21),两个所述固定框(21)的顶端两侧均固定连接有电动伸缩杆三(22),所述电动伸缩杆三(22)的输出端贯穿固定框(21)并延伸至固定框(21)的外侧,所述电动伸缩杆三(22)的输出端之间固定连接有抵板(23)。
6.根据权利要求1所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述输送装置包括:管道(25),所述检测装置(2)的一侧固定连接有收集箱(24),所述管道(25)固定安装在收集箱(24)上,所述管道(25)的另一端贯穿检测装置(2)并延伸至检测装置(2)的外侧,管道(25)延伸至检测装置(2)外侧的一端固定连接有吸尘嘴。
7.根据权利要求1所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述阻挡装置包括:挡板(30),所述输送架(1)的顶端远离固定架(3)的一侧固定连接有电动伸缩杆四(26),所述电动伸缩杆四(26)的输出端固定连接有推板(27),所述输送架(1)的顶端靠近电动伸缩杆四(26)的一侧固定连接有连接架(28)。
8.根据权利要求7所述的一种可定位固定夹持焊接的自动化焊接机器人,其特征在于,所述连接架(28)的顶端两侧均固定连接有电动伸缩杆五(29),两个所述电动伸缩杆五(29)的输出端均贯穿连接架(28)并延伸至连接架(28)的外侧,所述挡板(30)固定安装在两个电动伸缩杆五(29)的输出端上。
技术总结
本技术公开了一种可定位固定夹持焊接的自动化焊接机器人,包括输送架、检测装置以及固定架,所述输送架的顶端相对面均转动连接有滚筒,所述滚筒的表面均通过传送带传动连接,所述滚筒的一端贯穿输送架并延伸至输送架的外侧,所述输送架的底端固定连接有伺服电机一,所述伺服电机一的输出端与所述滚筒延伸至输送架外侧的一端之间通过皮带传动连接,所述检测装置的一侧设置有对焊接产生的废屑进行收集的输送装置,所述输送架的顶端设置有阻挡装置,通过阻挡装置对焊接完的产品进行分拣,涉及自动化焊接技术领域,通过设置输送装置能够有效的对产品焊接口的废屑进行收集,通过设置阻挡装置能够有效的对产品在分拣时进行阻挡。
技术研发人员:汪凯
受保护的技术使用者:辽宁开放大学(辽宁装备制造职业技术学院)
技术研发日:20230830
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!