一种高空作业车生产用车架臂全自动焊接机器人的制作方法
本发明涉及焊接,尤其涉及一种高空作业车生产用车架臂全自动焊接机器人。
背景技术:
1、金属焊接是一种连接金属的制造过程。焊接过程中,工件和焊料熔化或不熔化,形成材料直接的连接焊缝。
2、经检索,公告号cn215200393u的专利,公开了“一种电动车车架焊接用夹持装置”,包括:底板、夹持机构以及移动导向机构;其中,所述夹持机构安装于所述底板的顶部,所述夹持机构包括活动板,所述底板的顶部开设有第一滑槽,所述活动板滑动安装于所述第一滑槽的内部。
3、但是,上述装置中,利用气缸推动夹板对车架臂进行夹持固定后,再进行焊接,若车架臂是空心的,气缸对车架臂的夹持力过小,则容易导致夹持不够稳定,影响焊接稳定性,若气缸对车架臂的夹持力过大,则容易导致空心车架臂发生形变,同样会影响焊接质量。
技术实现思路
1、本发明的目的是为了解决现有技术中利用气缸推动夹板对车架臂进行夹持固定后,再进行焊接,若车架臂是空心的,气缸对车架臂的夹持力过小,则容易导致夹持不够稳定,影响焊接稳定性,若气缸对车架臂的夹持力过大,则容易导致空心车架臂发生形变,同样会影响焊接质量的问题,而提出的一种高空作业车生产用车架臂全自动焊接机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
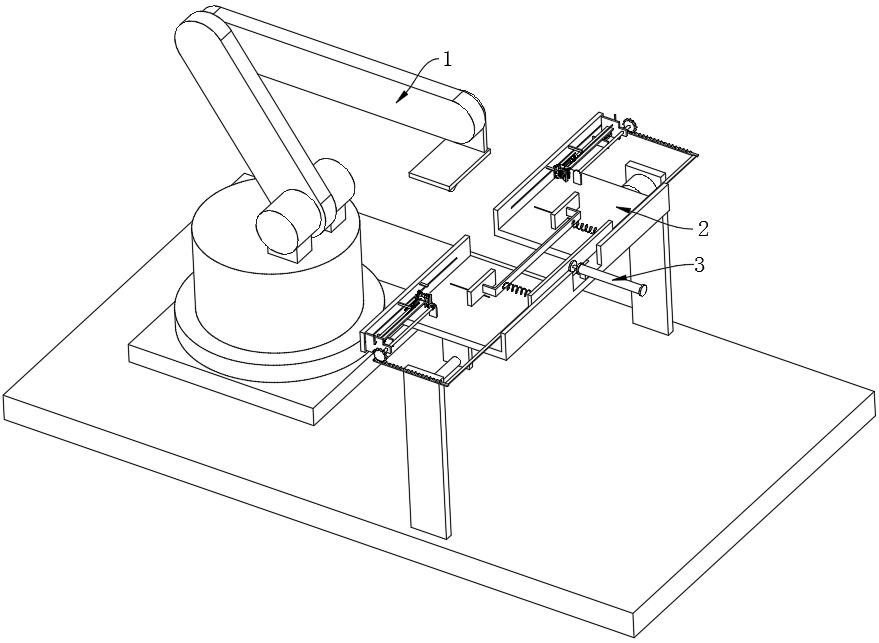
3、一种高空作业车生产用车架臂全自动焊接机器人,包括焊接机器人,所述焊接机器人一侧设有固定架,固定架一端上设有转动电机,用于对固定架进行整体翻转;
4、还设有用于将待焊接的方形空心车架臂进行自动稳定夹持,且自动对位的稳定对位夹持机构,所述稳定对位夹持机构包括固定安装在固定架上端中部前侧上的液压缸,液压缸后端固定安装有推板,推板后端左右对称均固定安装有弹簧一,弹簧一后端固定安装有夹板,夹板下端滑动安装在固定架上,固定架后侧上左右对称均滑动安装有活动板;
5、还设有用于防止方形空心车架臂在被夹持固定时,出现变形的防变形机构,所述防变形机构包括滑动安装在活动板相互靠近一端上,且呈前后对称设置的前后支撑板,前后支撑板上下两侧上均滑动安装有上下支撑板。
6、优选的,所述活动板相互远离的一端上均贯穿螺纹安装有齿轮螺杆,齿轮螺杆相互靠近的一端均转动安装在固定架上,齿轮螺杆下端均啮合设有齿条一,齿条一前端与推板固定连接。
7、优选的,所述活动板下侧上均贯穿滑动安装有导杆,导杆相互靠近的一端均固定安装有对齐板,且导杆外侧上均套设有弹簧二。
8、优选的,所述前后支撑板之间均固定安装有弹簧三,且活动板上端位于两个前后支撑板之间均滑动安装有梯形板。
9、优选的,所述梯形板上端固定安装有齿条二,齿条二前端均啮合有传动齿轮,传动齿轮下端转动安装在活动板上,传动齿轮前端啮合有齿条三,齿条三贯穿滑动安装在活动板上,且固定架上对应齿条三固定安装有顶板。
10、优选的,所述上侧的上下支撑板之间均固定安装有伸缩条,上下两侧的上下支撑板之间均固定安装有弹簧四,且活动板上下两端对应上下支撑板均固定安装有斜块板,上下支撑板与斜块板的斜面抵接。
11、优选的,所述前后支撑板相互靠近的一侧均设有前后清理条,前后清理条的一端均固定安装有连杆一,连杆一另一端均贯穿滑动安装在前后支撑板上,连杆一外侧上均套设有弹簧五,弹簧五的两端分别与前后支撑板和前后清理条固定连接。
12、优选的,所述上下支撑板的上下两侧均设有上下清理条,上下清理条一端均固定安装有连杆二,连杆二另一端贯穿滑动安装在上下支撑板上,连杆二外侧上均套设有弹簧六,弹簧六两端分别与上下清理条和上下支撑板固定连接。
13、优选的,所述连杆一和连杆二相互靠近的一端均固定安装有连接绳,连接绳的另一端固定安装有收卷盘,收卷盘转动安装在活动板上。
14、优选的,所述收卷盘的转轴上固定安装有磁性条,且固定架上位于磁性条的上侧固定安装于磁性板。
15、与现有技术相比,本发明的有益效果是:
16、1、本发明中,将待焊接的两个空心方形车架臂放置在固定架上,使其位于夹板的后侧处,启动液压缸带动推板向后运动,推板带动弹簧一和夹板同步向后运动,夹板此时向空心方形车架臂的方向滑动,直到与空心方形车架臂接触,并将空心方形车架臂夹持固定在固定架的上端内侧上,与此同时,推板向后运动时,也会带动两侧的齿条一向后同步运动,齿条一带动齿轮螺杆转动,齿轮螺杆带动活动板在固定架上呈相互靠近的方向滑动,此时两侧的活动板呈相互靠近的方向运动,活动板会带动前后支撑板插入到空心方形车架臂的内部,两侧的对齐板也会与空心方形车架臂的一端接触,并推动两侧的空心方形车架臂相互接触的焊接面自动对齐居中,便于实现了空心方形车架臂的自动夹持固定以及自动对齐居中,避免了人工对齐以及夹持操作,节约了时间,提高了工作效率。
17、2、本发明中,随着液压缸推动推板的继续向后运动,此时由于夹板已经将空心方形车架臂推到了固定架的上端并与后侧壁抵接了,所以,夹板会停止运动,进而会对弹簧一进行压缩,推板此时会继续带动齿条一向后运动,在齿轮螺杆的作用下,活动板也会继续呈相互靠近的方向运动,继续向空心方形车架臂的内部伸入,此时由于两侧的空心方形车架臂已经对齐居中了,所以两侧的对齐板也会继续跟随活动板的相互靠近运动,进而带动导杆在两侧的活动板上滑动,压缩弹簧二,实现了两侧的对齐板能够自适应的调节,确保了两侧的活动板能够继续呈相互靠近运动。
18、3、本发明中,随着活动板的继续运动,也会带动齿条三继续运动,设置的顶板会对齿条三进行阻挡,齿条三停止运动,活动板继续相互靠近,进而带动传动齿轮在活动板上转动,活动板带动齿条二和梯形板在活动板上滑动,梯形板会朝着两侧前后支撑板的方向滑动,进而会挤压两侧的前后支撑板,两侧前后支撑板在活动板上呈相互远离的方向滑动,拉伸弹簧三,直到两侧的前后支撑板抵接在空心方形车架臂的前后两侧内壁上,便于对空心方形车架臂的前后两侧内壁进行支撑,且两侧的前后支撑板在活动板上前后远离时,也会带动上下支撑板同步运动,上下支撑板会受到斜块板的斜面的挤压,进而会使上下支撑板在前后支撑板上向空心方形车架臂的内壁上下两端方向滑动,当两侧的前后支撑板抵接在空心方形车架臂的前后内壁上时,上下支撑板也会同步的抵接在空心方形车架臂的上下内壁上,提供了对空心方形车架臂内壁上下、前后四面的支撑力,避免了因夹持力过大,造成空心方形车架臂的变形,从而导致两个空心方形车架臂对接的焊接面出现凹凸不平的情况,从而提高了空心方形车架臂的焊接质量。
19、4、本发明中,设置的伸缩条可以根据两侧前后支撑板相互远离或相互靠近时,进行自适应的调节长度,且设置的伸缩条使得两侧的上下支撑板可以同步升降,提高了上下支撑板的支撑时的强度。
20、5、本发明中,设置的弹簧一也会受到较大的挤压力,进而确保了夹板能够牢牢的夹持固定住两侧的空心方形车架臂,避免了空心方形车架臂焊接时因夹持力不稳发生偏移,提高了焊接的质量,同时也不会造成空心方形车架臂夹持力过大,出现形变的情况。
21、6、本发明中,当前后支撑板跟随活动板向空心方形车架臂内部前进时,也会带动连杆二和上下清理条、连杆一和前后清理条同步运动,由于上下清理条和前后清理条在弹簧六和弹簧五的作用下,分别伸出在上下支撑板和前后支撑板的外侧,可以率先与空心方形车架臂的前后和上下四面内壁抵接,当活动板向空心方形车架臂内部滑动时,设置的上下清理条和前后清理条便于对空心方形车架臂内壁上粘附的杂质进行刮除,避免了杂质影响前后支撑板和上下支撑板在对空心方形车架臂内壁四面进行抵接支撑时,出现空心方形车架臂因一面有杂质导致翘起,并与另一空心方形车架臂出现不对齐的情况,提高了空心方形车架臂后续的焊接质量,同时确保了对空心方形车架臂内部的稳定支撑。
22、7、本发明中,当收卷盘和磁性条跟随活动板同步向空心方形车架臂内部给进时,会使磁性条经过磁性板下侧,在磁力相斥的作用下,推动磁性条下降,进而带动收卷盘转动,对连接绳进行收卷,收卷的连接绳分别对连杆一和连杆二进行牵引,从而使各自的上下清理条和前后清理条相互向内收缩,压缩弹簧六和弹簧五,当磁性条从磁性板下侧移走时,在弹簧六和弹簧五的作用下推动连杆一和前后清理条、连杆二和上下清理条复位,有利于将前后清理条和上下清理条上刮除空心方形车架臂内壁上粘附的杂质抖落,确保了再次刮除空心方形车架臂内壁上杂质时的质量。
- 还没有人留言评论。精彩留言会获得点赞!