成膜装置、电子器件的制造装置、成膜方法及电子器件的制造方法与流程
1.本发明涉及成膜装置、电子器件的制造装置、成膜方法及电子器件的制造方法。
背景技术:
2.有机el显示装置(有机el显示器)的应用领域不仅为智能手机、电视机、汽车用显示器,还扩展到vr-hmd(virtual reality head mount display)等,特别是,vr-hmd所使用的显示器为了降低用户的目眩而要求以高精度形成像素图案。
3.在有机el显示装置的制造中,在形成构成有机el显示装置的有机发光元件(有机el元件;oled)时,将从成膜装置的成膜源放出的成膜材料经由形成有像素图案的掩模在基板上成膜,从而形成有机物层、金属层。此时,作为成膜源,通常使用蒸镀源,在蒸镀源中将成膜材料加热到高温而使其蒸发。
4.在这样的成膜装置中,在成膜工序之前,使用分别设置于基板和掩模的对准标记来测定基板与掩模的相对位置,在相对位置发生偏移的情况下,使基板和/或掩模相对移动来调整(对准)位置。
5.有机发光元件的有机物层、金属层等的成膜精度受到基板与掩模的对准的精度的影响。若在成膜工序之前或者成膜工序的进行过程中基板与掩模的相对位置发生偏移,则成膜精度会下降。
技术实现要素:
6.发明要解决的课题
7.在成膜装置中,配置于蒸镀源侧的掩模容易受到来自蒸镀源的辐射热的影响,温度有时会上升。与此相比,基板不仅在其与蒸镀源之间配置有掩模而相对较少地受到辐射热的影响,而且与吸附其背面的静电吸盘接触,因此维持为相对较低的温度。结果,在基板与掩模之间产生温度差。
8.因此,基板与掩模各自的热膨胀的程度产生差异,影响对准的精度。即,有可能由于相对处于高温的掩模的热膨胀而导致定义成膜图案的掩模的开口的大小发生变化,或者开口的位置发生偏移。结果,成膜精度下降,成膜工序的成品率降低。
9.本发明的目的在于提供一种能够降低因掩模与基板的温度差而导致的成膜精度的降低的成膜装置、电子器件的制造装置、成膜方法以及使用了该成膜方法的电子器件的制造方法。
10.用于解决课题的手段
11.本发明是一种成膜装置,该成膜装置具备:真空容器;基板吸附部件,其设置于所述真空容器内,具有用于吸附基板的吸附面;掩模支承单元,其设置于所述真空容器内,用于支承掩模;对准部件,其通过使所述基板吸附部件和所述掩模支承单元中的至少一方在与所述吸附面平行的第1方向、与所述吸附面平行且与所述第1方向交叉的第2方向以及以
deposition)装置的成膜装置。具体而言,本发明的技术能够应用于半导体器件、磁性器件、电子元件等各种电子器件、光学元件等的制造装置。作为电子器件的具体例,可列举出发光元件、光电转换元件、触摸面板等。
34.其中,本发明能够优选应用于oled等有机发光元件、有机薄膜太阳能电池等有机光电转换元件的制造装置。此外,本发明的电子器件也包括具备发光元件的显示装置(例如有机el显示装置)、照明装置(例如有机el照明装置)、具备光电转换元件的传感器(例如有机cmos图像传感器)。
35.<电子器件的制造装置>
36.图1是示意性地表示电子器件的制造装置的一部分结构的俯视图。
37.图1的制造装置例如用于vr-hmd用的有机el显示装置的显示面板的制造。在vr-hmd用的显示面板的情况下,例如,在对规定的尺寸的硅晶圆进行了用于形成有机el元件的成膜之后,沿着元件形成区域之间的区域(划线区域)切取该硅晶圆,制作多个小尺寸的面板。
38.本实施方式的电子器件的制造装置一般而言包括多个集群装置(日文:
クラスタ
装置)1和将集群装置1之间相连的中继装置。
39.集群装置1具备用于对基板w进行处理(例如成膜)的成膜装置11、用于收纳使用前后的掩模m的掩模储备装置12、以及配置于其中央的输送室13(输送装置)。如图1所示,输送室13与成膜装置11和掩模储备装置12分别连接。
40.在输送室13内配置有输送基板w和掩模m的输送机器人14。输送机器人14例如是具有在多关节臂安装有保持基板w或掩模m的机械手的构造的机器人。
41.在成膜装置11中,从蒸镀源放出的成膜材料经由掩模m在基板w上成膜。与输送机器人14的基板w/掩模m的交接、后述的本发明的均热化工序、基板w与掩模m的相对位置的调整(对准)、掩模m与基板w的固定、成膜等一系列的成膜工艺由成膜装置11进行。
42.在用于制造有机el显示装置的制造装置中,成膜装置11根据要成膜的材料的种类能够分为有机膜的成膜装置和金属性膜的成膜装置。有机膜的成膜装置通过蒸镀或溅射将有机物的成膜材料在基板w上成膜。金属性膜的成膜装置通过蒸镀或溅射将金属性的成膜材料在基板w上成膜。
43.在用于制造有机el显示装置的制造装置中,将哪个成膜装置配置于哪个位置根据要制造的有机el元件的层叠构造而不同,根据有机el元件的层叠构造而配置用于对其进行成膜的多个成膜装置。
44.在有机el元件的情况下,通常具有在形成有阳极的基板w上依次层叠空穴注入层、空穴传输层、发光层、电子传输层、电子注入层、阴极的构造,以能够将这些层依次成膜的方式配置成膜装置。
45.在掩模储备装置12中,成膜装置11的成膜工序要使用的新的掩模m和已使用的掩模m分开收纳在多个盒体中。输送机器人14将已使用的掩模m从成膜装置11输送到掩模储备装置12的盒体,将收纳于掩模储备装置12的其他盒体的新的掩模m输送到成膜装置11。
46.在多个集群装置1之间连结的中继装置包括在集群装置1之间输送基板w的通路室15。
47.输送室13的输送机器人14从上游侧的通路室15接收基板w,将其输送到该集群装
置1内的成膜装置11之一(例如,成膜装置11a)。另外,输送机器人14从多个成膜装置11之一(例如,成膜装置11e)接收该集群装置1中的成膜处理已完成的基板w,将其输送到与下游侧连结的通路室15。
48.中继装置除了通路室15之外能够还包括用于吸收上下游侧的集群装置1中的基板w的处理速度之差的缓冲室(未图示)和用于改变基板w的朝向的回旋室(未图示)。例如,缓冲室包括临时收纳多个基板w的基板装载部,回旋室包括用于使基板w旋转180度的基板旋转机构(例如,旋转台或者输送机器人)。由此,在上游侧的集群装置和下游侧的集群装置之间基板w的朝向变为相同,基板处理变得容易。
49.本发明的一实施方式的通路室15也可以包括用于临时收纳多个基板w的基板装载部(未图示)、基板旋转机构。也就是说,通路室15也可以兼具缓冲室、回旋室的功能。
50.构成集群装置1的成膜装置11、掩模储备装置12、输送室13等在有机发光元件的制造过程中维持为高真空状态。中继装置的通路室15通常维持为低真空状态,但根据需要也可以维持为高真空状态。
51.构成有机el元件的多个层的成膜已完成的基板w输送到用于密封有机el元件的密封装置(未图示)、用于将基板w切断为规定的面板尺寸的切断装置(未图示)等。
52.在本实施例中,参照图1,说明了电子器件的制造装置的结构,但本发明并不限定于此,可以具有其他种类的装置、腔室,这些装置、腔室之间的配置也可以改变。
53.例如,本发明的一实施方式的电子器件制造装置也可以不是图1所示的集群式,而是直列式。也就是说,也可以具有将基板w和掩模m搭载于载体,一边使其在排成一列的多个成膜装置内通过一边进行成膜的结构。另外,也可以具有将集群式和直列式组合而成的类型的构造。例如,也可以直到有机层的成膜为止由集群式的制造装置进行,从电极层(阴极层)的成膜工序到密封工序及切断工序等由直列式的制造装置进行。
54.以下,说明成膜装置11的具体的结构。
55.<成膜装置>
56.图2是表示本发明的一实施方式的成膜装置11的结构的示意图。在以下的说明中,使用将铅垂方向设为z方向、将水平面设为xy平面的xyz直角坐标系。另外,用θ
x
表示绕x轴的旋转角,用θ
y
表示绕y轴的旋转角,用θ
z
表示绕z轴的旋转角。
57.图2示出了通过加热成膜材料而使其蒸发或升华、经由掩模m在基板w上成膜的成膜装置11的一例。
58.成膜装置11包括:真空容器21,其维持为真空环境或氮气等非活性气体环境;磁悬浮台机构22(第1驱动机构),其设置于真空容器21内,用于在x方向(第1方向)、y方向(第2方向)以及θ
z
方向(旋转方向)中的至少一个方向上调整基板w的位置;掩模支承单元23,其设置于真空容器21内,用于支承掩模m;基板吸附部件24,其设置于真空容器21内,用于吸附并保持基板w;以及蒸镀源25,其设置于真空容器21内,用于收纳成膜材料,将其加热并放出。
59.本发明的一实施方式的成膜装置11能够还包括用于利用磁力使掩模m紧贴于基板w侧的磁力施加部件26。
60.本发明的一实施方式的成膜装置11的真空容器21包括:第1真空容器部211,其配置有磁悬浮台机构22;以及第2真空容器部212,其配置有蒸镀源25。真空容器21例如通过与第2真空容器部212连接的真空泵(未图示)而将其内部空间维持为高真空状态。
61.在此,为了减少外部振动传递到磁悬浮台机构22的情况,基于将真空容器21分为多个真空容器部211、212的构造说明本发明的实施例。但是,本发明并不限定于此,也同样能够应用于真空容器21由单一的真空容器部构成的成膜装置。
62.如图2所示,在真空容器21分为2个真空容器部211、212的情况下,至少在第1真空容器部211与第2真空容器部212之间设置可伸缩构件213。可伸缩构件213减少来自与第2真空容器部212连结的真空泵的振动、来自设置有成膜装置11的地面或地板的振动通过第2真空容器部212向第1真空容器部211传递的情况。可伸缩构件213例如为波纹管,但本发明并不限定于此,也可以在第1真空容器部211与第2真空容器部212之间使用能够减少振动的传递的其他构件。
63.这样,本发明的一实施方式的成膜装置11能够减少外部振动传递到设置磁悬浮台机构22的第1真空容器部211的情况。
64.真空容器21还包括与磁悬浮台机构22固定连结的基准板214和用于将基准板214支承在规定的高度的基准板支承部215。根据本发明的一实施例,如图2所示,也可以在基准板214与第1真空容器部211之间还设置可伸缩构件213。由此,能够进一步减少外部振动经由基准板214传递到磁悬浮台机构22的情况。
65.虽未图示,但真空容器21能够还包括以向真空容器21的内侧突出的方式设置于基准板214、也就是说设置于真空容器21的上部容器壁的真空对应筒。在该情况下,后述的对准摄像机单元27的对准摄像机以插入到真空对应筒的大气侧的方式配置。
66.在基准板支承部215与成膜装置11的设置架台217之间设置有用于减少振动从地面或地板通过设置架台217传递到基准板支承部215的情况的除振单元216。
67.磁悬浮台机构22是用于基于由对准摄像机单元27测定的基板w与掩模m的相对位置来对基板w与掩模m的相对位置进行调整(对准动作)的对准台机构(对准部件)的一例。也就是说,磁悬浮台机构22是用于通过磁悬浮线性马达来调整基板w或基板吸附部件24的位置的台机构,至少能够调整x方向、y方向、θ
z
方向上的基板w或基板吸附部件24的位置。
68.磁悬浮台机构22包括作为固定台发挥功能的台基准板部221、作为可动台发挥功能的微动台板部222以及用于使微动台板部222相对于台基准板部221磁悬浮及移动的磁悬浮单元223。
69.磁悬浮台机构22使用自重补偿磁体(未图示)提供与作用于微动台板部222的重力对应的大小的悬浮力。由此,能够在使微动台板部222悬浮的状态下,使用磁悬浮线性马达(未图示)使微动台板部222在x方向、y方向以及θ
z
方向中的至少一个方向上移动。此时,微动台板部222的位置能够使用激光干涉仪(未图示)进行测定,测定到的位置信息用于控制磁悬浮线性马达的驱动。
70.图2示出了使用磁悬浮台机构22作为对准台机构的实施例,但本发明并不限定于此,例如也可以使用包括设置于真空容器21的外部的xyθ
z
致动器等的机械的对准台机构。
71.掩模支承单元23是接收并保持由设置于输送室13的输送机器人14输送来的掩模m的部件,也称为掩模支架。
72.掩模支承单元23设置为至少能够在铅垂方向(z方向、第3方向)上升降。由此,能够容易地调节基板w与掩模m之间的铅垂方向上的间隔。在如本发明的一实施例那样通过磁悬浮台机构22调整基板w的位置的情况下,优选通过包括马达(未图示)和滚珠丝杠/导向件
(未图示)等的升降机构将支承掩模m的掩模支承单元23机械地升降驱动。
73.另外,根据本发明的一实施例,掩模支承单元23也可以设置为能够在水平方向(也就是说,xyθ
z
方向)上移动。由此,在掩模m脱离对准摄像机单元27的对准摄像机的视野的情况下,也能够迅速地使其移动到视野内。
74.掩模支承单元23还包括用于临时接收由输送机器人14送入到真空容器21内的掩模m的掩模拾取器231。
75.掩模拾取器231构成为能够相对于掩模支承单元23的掩模支承面相对升降。例如,如图2所示,能够通过掩模拾取器升降机构232使掩模拾取器231构成为能够相对于掩模支承单元23的掩模支承面相对升降。但是,本发明并不限定于此,只要掩模拾取器231和掩模支承单元23的掩模支承面能够相对升降,则也可以具有其他结构。
76.从输送机器人14的手部接收了掩模m的掩模拾取器231相对于掩模支承单元23的掩模支承面相对下降,将掩模m放下至掩模支承单元23。反之,在将已使用的掩模m送出的情况下,将掩模m从掩模支承单元23的掩模支承面抬起,以使输送机器人14的手部能够接收掩模m。
77.掩模m具有与形成在基板w上的薄膜图案对应的开口图案,由掩模支承单元23支承。例如,为了制造vr-hmd用的有机el显示面板所使用的掩模m包括形成有与有机el元件的发光层的rgb像素图案对应的微细的开口图案的金属制掩模即精细金属掩模(fine metal mask)、以及为了形成有机el元件的通用层(空穴注入层、空穴传输层、电子传输层、电子注入层等)所使用的开口掩模(open mask)。
78.基板吸附部件24是用于保持基板w的基板保持单元的一例。基板吸附部件24吸附并保持由设置于输送室13的输送机器人14输送来的作为被成膜体的基板w,设置于作为磁悬浮台机构22的可动台的微动台板部222。
79.基板吸附部件24例如是具有在电介质/绝缘体(例如陶瓷材质)基体内埋设有金属电极等电路的构造的静电吸盘。这样的静电吸盘与基板w相比热容量大,因此吸附于静电吸盘的基板w与掩模m相比,即使受到来自蒸镀源25的辐射热的影响,温度的上升也相对地得到抑制(例如,室温)。因而,如后所述,通过在对准工序(对准动作)之前使基板w与掩模m接触或紧贴,能够降低掩模m的温度。
80.作为基板吸附部件24的静电吸盘可以是在电极与吸附面之间夹设电阻相对较高的电介质、通过电极与被吸附体之间的库仑力进行吸附的库仑力式的静电吸盘,也可以是在电极与吸附面之间夹设电阻相对较低的电介质、通过在电介质的吸附面与被吸附体之间产生的约翰逊
·
拉别克力进行吸附的约翰逊
·
拉别克力式的静电吸盘,还可以是通过不均匀电场吸附被吸附体的梯度力式的静电吸盘。
81.在被吸附体为导体或半导体(硅晶圆)的情况下,优选使用库仑力式的静电吸盘或者约翰逊
·
拉别克力式的静电吸盘,在被吸附体为玻璃这样的绝缘体的情况下,优选使用梯度力式的静电吸盘。
82.静电吸盘可以由一个板形成,也可以形成为具有能够独立地控制吸附力的多个副板。另外,在由一个板形成的情况下,也可以在其内部具有多个电极部,以能够在一个板内按照每个电极部独立地控制吸附力。
83.成膜装置11也可以还设有在基板吸附部件24吸附并保持由输送机器人14送入到
真空容器21内的基板w之前临时保持基板w的基板支承单元。例如,基板支承单元也可以设置为在掩模支承单元23具有另外的基板支承面,设置为通过掩模支承单元23的升降而升降。
84.另外,也可以在基板吸附部件24一体或分体地设置用于冷却基板吸附部件24的冷却部件、即抑制基板w的温度上升的冷却部件。作为前者的例子,例如也可以在静电吸盘设置制冷剂流路而使制冷剂流动,从而静电吸盘也兼具作为冷却部件的作用。作为后者的例子,也能够在静电吸盘的基板吸附面的相反侧追加设置另外的冷却板。
85.这样,基板吸附部件24也兼具作为冷却部件的作用,或者通过另外设置冷却部件,从而能够更加抑制基板w的温度的上升。由此,能够抑制堆积在基板w上的有机材料的变质、劣化。特别是,通过设置冷却部件,能够在使基板w与掩模m接触或紧贴时更加高效地使高温状态的掩模m冷却。
86.蒸镀源25包括收纳要在基板w上成膜的成膜材料的坩埚(未图示)、用于加热坩埚的加热器(未图示)以及在从蒸镀源25的蒸镀率变得恒定之前阻止成膜材料向基板w飞散的挡板(未图示)等。蒸镀源25能够根据用途而具有多种多样的结构,如点(point)蒸镀源、线状(linear)蒸镀源等。
87.蒸镀源25也可以包括收纳互不相同的成膜材料的多个坩埚。在这样的结构中,也可以将收纳不同的成膜材料的多个坩埚设置为能够移动到成膜位置,以便不使真空容器21大气开放就能够变更成膜材料。
88.磁力施加部件26是用于利用磁力将掩模m向基板w侧吸引而使其紧贴的部件。也就是说,磁力施加部件26为了均热化而在对准工序之前和/或对准工序的完成后且是成膜工序的开始前,通过利用磁力吸引掩模m而使其与基板w紧贴。
89.这样的磁力施加部件26是用于将掩模m吸引到基板w侧而使其紧贴的掩模紧贴部件的一例,但本发明并不限定于此。例如,掩模m也能够使用基板吸附部件24的静电吸盘吸引到基板w侧。在该情况下,基板吸附部件也同时作为掩模紧贴部件发挥功能。
90.这样的磁力施加部件26设置为能够在铅垂方向上升降。在该情况下,在吸引掩模m时,使磁力施加部件26向掩模m侧下降,反之在分离被吸引的掩模m时,使磁力施加部件26从掩模m侧上升。也能够与此不同地通过将施加于磁力施加部件26的电压接通/断开来控制磁力的产生。这样的磁力施加部件26、例如磁力施加部件26能够由电磁体和/或永磁体构成。
91.成膜装置11也可以包括用于测定蒸镀到基板w上的膜的厚度的膜厚检测器(未图示)以及膜厚计算单元(未图示)。
92.在真空容器21的上部外侧(大气侧)、也就是说基准板214上设置有用于使掩模拾取器231升降的掩模拾取器升降机构232、用于使磁力施加部件26升降的磁力施加部件升降机构261等。
93.而且,也可以将用于使掩模支承单元23升降的掩模支承单元升降机构(未图示,第2驱动机构)设置在基准板214上,但本发明并不限定于此,例如也可以将掩模支承单元升降机构(未图示)设置于第1真空容器部211的下部的大气侧。另外,也可以将用于使基板吸附部件24这样的基板保持单元升降的基板保持单元升降机构(未图示)设置于真空容器21的上部外侧。另外,也可以是一个升降机构(未图示)使掩模支承单元23和基板吸附部件24中的至少一方升降。
94.本发明的一实施例的成膜装置11还包括对准摄像机单元27,该对准摄像机单元27包括用于对形成于基板w和掩模m的对准标记进行拍摄而测定基板w与掩模m的相对位置的对准摄像机。
95.对准摄像机包括视角宽且分辨率相对较低的粗对准摄像机(第1对准摄像机)和视角窄且分辨率相对较高的精对准摄像机(第2对准摄像机)。粗对准摄像机和精对准摄像机分别设置于与粗对准标记的位置(第1位置)对应的位置和与精对准标记的位置(第2位置)对应的位置,以便能够对设置于基板w和掩模m的粗对准标记和精对准标记进行拍摄。粗对准标记的位置和精对准标记的位置也可以互不相同。
96.成膜装置11具备控制部28。控制部28具有基板w/掩模m的输送的控制、基板w与掩模m之间的距离的控制、掩模m向基板w紧贴的控制、对准的控制、向基板吸附部件24施加电压的控制、成膜的控制等全面地控制成膜装置11的动作的功能。关于本发明的成膜方法中的控制部28的控制,参照图3~图5在后文叙述。
97.控制部28例如能够由具有处理器、内存、存储器、i/o等的计算机构成。在该情况下,控制部28的功能通过处理器执行存储于内存或者存储器中的程序来实现。作为计算机,既可以使用通用的个人计算机,也可以使用嵌入式计算机或plc(programmable logic controller)。或者,也可以由asic、fpga这样的电路构成控制部28的一部分或者全部功能。另外,可以按照每个成膜装置设置控制部,也可以构成为一个控制部控制多个成膜装置。
98.<成膜工艺>
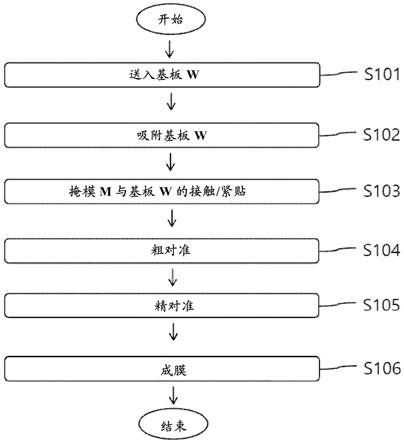
99.以下,参照图3~图5,说明图2所示的本实施方式的成膜装置11的成膜方法。
100.在本发明的成膜方法中,在实施基板w与掩模m的对准(位置调整)工序之前,实施使基板w与掩模m接触或紧贴而均热化的均热化工序。
101.在此,“接触”是指,掩模m与基板w充分/非常靠近,基板w的至少一部分与掩模m的至少一部分接触的状态。另一方面,“紧贴”是指,从掩模m与基板w接触的状态起,通过磁力施加部件26这样的掩模紧贴部件,将掩模m与基板w进一步相对地吸引的状态等两者无间隙地接触的状态。
102.如前所述,掩模m容易受到来自蒸镀源25的辐射热的影响而温度上升,但基板w被基板吸附部件24吸附,温度的上升得到抑制,或者被冷却部件冷却。在该情况下,有时会由于掩模m的热膨胀而导致掩模m的开口图案发生变形,或者开口图案和/或对准标记发生位置偏移,对准的精度和成膜精度下降。然而,根据本发明,通过在对准工序之前使基板w与掩模m接触或紧贴,实施均热化工序或冷却工序,从而能够抑制由于掩模m的热膨胀而导致的对准精度和成膜精度的下降。
103.特别是,本发明的实施例的均热化工序或冷却工序仅通过在实施对准工序之前使基板w与掩模m接触或紧贴而进行,因此,也可以不在成膜装置11追加另外的结构要素,能够直接使用现有的成膜装置11。
104.但是,本发明并不限定于此,也可以与均热化工序一起,在掩模支承单元23追加设置规定的冷却部件等,从而追加地冷却掩模m。
105.在对准工序分为第1对准(粗对准)和第2对准(精对准)进行的情况下,本发明的均热化工序既可以在实施第1对准之前执行,或者也可以在实施第2对准之前执行。或者,根据实施例,均热化工序也可以在实施第1对准之前和实施第2对准之前执行。
106.图3是表示本发明的第1实施例的成膜方法的流程图,图4是示意性地表示图3的成膜方法的一部分工序的图。在图3和图4所示的实施例中,使掩模m与基板w接触或紧贴而冷却掩模m的均热化工序在基板w与掩模m的对准工序之前、即粗对准工序之前执行。
107.首先,在掩模m支承于掩模支承单元23的状态下,通过输送室13的输送机器人14将基板w送入到真空容器21内(s101)。
108.控制部28对基板吸附部件24施加基板吸附电压,使由输送机器人14送入到真空容器21内的基板w吸附于基板吸附部件24(s102)。图4的(a)表示掩模m支承于掩模支承单元23,基板w吸附于基板吸附部件24的状态。在使基板w吸附于基板吸附部件24时,可以使基板w的整个表面同时吸附于基板吸附部件24的整个吸附面,也可以使基板w从基板吸附部件24的多个区域中的一个区域向其他区域依次吸附。
109.接下来,为了进行基板w与掩模m的均热化,使掩模m与基板w接触或紧贴(s103,图4的(b)和(c))。
110.因此,控制部28驱动掩模支承单元升降机构,使基板吸附部件24与掩模支承单元23相对地靠近(图4的(b))。此时,能够使基板吸附部件24与掩模支承单元23相对地靠近(例如,使掩模支承单元23上升),直到达到由掩模支承单元23支承的掩模m与吸附于基板吸附部件24的基板w接触的距离为止。由于基板w与掩模m接触,因此,从相对处于高温的掩模m向相对处于低温的基板w进行热传递。图4的(b)示出了基板w在被基板吸附部件24吸附的状态下与掩模m接触的状态,但在本发明中,接触并不限定于此,例如,也可以通过使基板w离开基板吸附部件24而载置于掩模m上,从而与掩模m接触。
111.而且,也能够从掩模m与基板w接触的状态起,追加实施使掩模m与基板w紧贴的工序。因此,控制部28驱动磁力施加部件升降机构261,使磁力施加部件26向基板吸附部件24侧下降。由此,掩模m被来自磁力施加部件26的磁力吸引,与基板w紧贴(图4的(c))。与基板w接触的掩模m与基板w紧贴,从而更迅速且高效地进行从掩模m向基板w的热传递。
112.此时,优选基板w与掩模m在规定的时间的期间维持接触或紧贴的状态,以便充分进行从掩模m的热传递。在此,规定的时间优选根据基板w与掩模m的材质等设为几秒~几十秒。若接触或紧贴的时间过短,则无法充分获得掩模m与基板w的均热化效果,若过长,则整体上的工序时间增加,生产率下降。但是,本发明并不限定于该数字范围,只要能够在获得均热化、冷却的效果的同时也抑制整体的工序时间的增加,就可以为其他数字范围。
113.在经过了规定的时间之后,控制部28驱动磁力施加部件升降机构261,使磁力施加部件26从基板吸附部件24上升。结果,从掩模m与基板w紧贴的状态解除。
114.接下来,为了进行基板w与掩模m的相对位置的调整,实施第1对准(粗对准)(s104,图4的(d))。因此,首先,控制部28使基板吸附部件24与掩模支承单元23相对地分离(例如,使掩模支承单元23下降),直到吸附于基板吸附部件24的基板w与由掩模支承单元23支承的掩模m之间的距离达到预先设定的粗对准测量距离为止。
115.当基板w与掩模m之间的距离达到规定的粗对准测量距离时,通过粗对准摄像机对基板w和掩模m的对准标记进行拍摄,控制部28测定xyθ
z
方向上的基板w与掩模m的相对位置,基于此计算它们之间的相对位置偏移量。
116.控制部28基于由激光干涉仪测定的微动台板部222(或者基板吸附部件24)的位置和由粗对准摄像机计算的相对位置偏移量来计算微动台板部222(或者基板吸附部件24)的
移动目标位置的坐标。
117.基于移动目标位置的坐标,一边通过激光干涉仪测定微动台板部222的位置,一边通过磁悬浮线性马达在xyθ
z
方向上驱动微动台板部222(或者基板吸附部件24)直到移动目标位置,从而调整基板w与掩模m的相对位置。在本实施例的粗对准中,说明了通过磁悬浮线性马达使微动台板部222移动,但也可以根据基板w与掩模m之间的位置偏移量的大小而通过机械的对准台机构使掩模支承单元23在xyθ
z
方向上移动,从而进行粗对准。
118.当粗对准完成时,为了进行基板w与掩模m的相对位置的更精密的调整,实施第2对准(精对准)(s105,图4的(e))。因此,控制部28首先通过掩模支承单元升降机构使掩模支承单元23上升,使掩模m相对于基板w来到精对准测量位置。然后,在掩模m相对于基板w来到精对准测量位置时,通过精对准摄像机对基板w和掩模m的对准标记进行拍摄,控制部28测定xyθ
z
方向上的基板w与掩模m的相对位置偏移量。
119.若精对准测量位置处的基板w与掩模m之间的相对位置偏移量大于规定的阈值,则使掩模m再次下降,在使基板w与掩模m分离之后,控制部28基于由激光干涉仪32测定的微动台板部222的位置和基板w与掩模m的相对位置偏移量来计算微动台板部222的移动目标位置。
120.基于计算出的移动目标位置,一边通过激光干涉仪测定微动台板部222的位置,一边通过磁悬浮线性马达在xyθ
z
方向上驱动微动台板部222直到移动目标位置,从而调整基板w与掩模m的相对位置。
121.重复这样的过程,直到基板w与掩模m的相对位置偏移量小于规定的阈值为止。
122.然后,在基板w与掩模m的相对位置偏移量小于规定的阈值时,实施成膜工序(s106,图4的(f))。因此,控制部28首先使掩模支承单元23上升,以使吸附于基板吸附部件24的基板w的成膜面成为与掩模m的上表面接触的蒸镀位置。然后,控制部28在达到基板w与掩模m接触的蒸镀位置时,使磁力施加部件升降机构261下降,隔着基板w吸引掩模m,从而使基板w与掩模m紧贴。
123.在该过程中,为了确认是否产生基板w与掩模m在xyθ
z
方向上的位置偏移,使用精对准摄像机,进行基板w与掩模m的相对位置的测量,在测量到的相对位置的偏移量为规定的阈值以上的情况下,使基板w与掩模m再次分离到规定的距离(例如,使掩模支承单元23下降)之后,调整基板w与掩模m之间的相对位置,重复进行相同的过程。
124.在基板w与掩模m位于蒸镀位置的状态下,基板w与掩模m的相对位置偏移量小于规定的阈值时,开始成膜工序。此时,控制部28打开蒸镀源25的挡板,使蒸发的成膜材料经由掩模m在基板w上成膜。
125.在蒸镀为所期望的厚度之后,使磁力施加部件26上升而将掩模m分离,使掩模支承单元23下降。
126.接下来,输送机器人14的手部进入到成膜装置11的真空容器21内,对基板吸附部件24的电极部施加零(0)或者相反极性的基板分离电压,使基板w离开基板吸附部件24。通过输送机器人14将分离后的基板w从真空容器21送出。
127.图5是表示本发明的第2实施例的成膜方法的流程图。图5所示的实施例在以下方面与第1实施例不同:使掩模m与基板w接触或紧贴而冷却掩模m的均热化工序在粗对准工序与精对准工序之间实施。以下,以与第1实施例之间的不同点为中心对第2实施例进行说明。
128.参照图5,在掩模m支承于真空容器21内的掩模支承单元23的状态下,通过输送室13的输送机器人14将基板w送入到真空容器21内(s201)。
129.然后,控制部28对基板吸附部件24的电极部施加基板吸附电压而吸附基板w(s202)。
130.接下来,为了进行基板w与掩模m的相对位置的调整,实施第1对准(粗对准)(s203)。因此,首先,控制部28使基板吸附部件24与掩模支承单元23相对地靠近(例如,使掩模支承单元23上升),直到基板w与掩模m之间的距离达到预先设定的粗对准的测量距离为止。然后,通过粗对准摄像机测定基板w与掩模m的相对位置,基于此计算它们之间的相对位置偏移量之后,驱动微动台板部222或基板吸附部件24直到移动目标位置。
131.当粗对准完成时,为了进行基板w与掩模m的均热化,使掩模m与基板w接触或紧贴(s204)。此时,控制部28驱动掩模支承单元升降机构,使掩模支承单元23上升,使掩模m与基板w接触。而且,根据需要,也能够从掩模m与基板w接触的状态起,追加实施使掩模m与基板w紧贴的过程。此时,优选基板w与掩模m在规定的时间的期间维持接触或紧贴的状态,以便充分进行从掩模m向基板w的热传递。
132.接下来,为了进行基板w与掩模m的相对位置的更精密的调整,实施第2对准(精对准)(s205)。因此,控制部28首先通过掩模支承单元升降机构使掩模支承单元23下降,使掩模m相对于基板w来到精对准测量位置。然后,通过精对准摄像机对基板w和掩模m的对准标记进行拍摄,测定xyθ
z
方向上的相对位置偏移量之后,基于此将微动台板部222驱动到移动目标位置为止,从而调整基板w与掩模m的相对位置。
133.然后,若基板w与掩模m的相对位置偏移量小于规定的阈值,则实施成膜工序(s206)。因此,控制部28打开蒸镀源25的挡板,使蒸发的成膜材料经由掩模m在基板w上成膜。
134.在成膜材料在基板w上成膜至所期望的厚度之后,输送机器人14的手部进入到成膜装置11的真空容器21内,对基板吸附部件24的电极部施加零(0)或者相反极性的基板分离电压,使基板w从基板吸附部件24分离。通过输送机器人14将分离后的基板w从真空容器21送出。
135.此外,在上述说明中,成膜装置11为在基板w的成膜面朝向铅垂方向下方的状态下进行成膜的所谓的朝上蒸镀方式(向上蒸镀(日文:
デポアップ
))的结构,但本发明并不限定于此,也可以为在基板w垂直地立于真空容器21的侧面侧的状态下配置,以基板w的成膜面与重力方向平行的状态进行成膜的结构。
136.<电子器件的制造方法>
137.接下来,说明使用了本实施方式的成膜装置的电子器件的制造方法的一例。以下,作为电子器件的例子,例示有机el显示装置的结构和制造方法。
138.首先,说明要制造的有机el显示装置。图6的(a)表示有机el显示装置60的整体图,图6的(b)表示1像素的截面构造。
139.如图6的(a)所示,在有机el显示装置60的显示区域61以矩阵状配置有多个具备多个发光元件的像素62。详细情况将在之后说明,但发光元件分别具有具备被一对电极夹着的有机层的构造。此外,在此所说的像素是指,在显示区域61中能够进行所期望的颜色的显示的最小单位。在本实施例的有机el显示装置的情况下,通过显示出互不相同的发光的第1
发光元件62r、第2发光元件62g、第3发光元件62b的组合构成像素62。像素62往往由红色发光元件、绿色发光元件以及蓝色发光元件的组合构成,但也可以是黄色发光元件、青色发光元件以及白色发光元件的组合,只要为至少1种颜色以上,就没有特别限制。
140.图6的(b)是图6的(a)的a-b线的局部剖视示意图。像素62具有在基板63上具备阳极64、空穴传输层65、发光层66r、66g、66b中的任一个、电子传输层67以及阴极68的有机el元件。其中,空穴传输层65、发光层66r、66g、66b、电子传输层67相当于有机层。另外,在本实施方式中,发光层66r是发出红色的有机el层,发光层66g是发出绿色的有机el层,发光层66b是发出蓝色的有机el层。发光层66r、66g、66b分别形成为与发出红色、绿色、蓝色的发光元件(也有时描述为有机el元件)对应的图案。另外,阳极64按每个发光元件分离地形成。空穴传输层65、电子传输层67以及阴极68既可以与多个发光元件62r、62g、62b通用地形成,也可以按每个发光元件形成。此外,为了防止阳极64和阴极68因异物而短路,在阳极64之间设置有绝缘层69。并且,由于有机el层会因水分、氧而劣化,因此,设置有用于保护有机el元件不受水分、氧的影响的保护层70。
141.在图6的(b)中,用一个层表示空穴传输层65、电子传输层67,但也可以根据有机el显示元件的构造而由包括空穴阻挡层、电子阻挡层的多个层形成。另外,也能够在阳极64与空穴传输层65之间形成具有能带构造的空穴注入层,以能够使空穴从阳极64顺利地向空穴传输层65注入。同样地,能够在阴极68与电子传输层67之间也形成电子注入层。
142.接下来,具体说明有机el显示装置的制造方法的例子。
143.首先,准备形成有用于驱动有机el显示装置的电路(未图示)和阳极64的基板63。
144.在形成有阳极64的基板63上通过旋涂形成丙烯酸树脂,利用光刻法以在形成有阳极64的部分形成开口的方式将丙烯酸树脂形成图案而形成绝缘层69。该开口部相当于发光元件实际发光的发光区域。
145.将绝缘层69形成图案的基板63送入第1有机材料成膜装置,通过静电吸盘保持基板63,将空穴传输层65作为通用的层在显示区域的阳极64上成膜。空穴传输层65通过真空蒸镀进行成膜。实际上,空穴传输层65形成为比显示区域61大的尺寸,因此不需要高精细的掩模。
146.接下来,将形成至空穴传输层65的基板63送入第2有机材料成膜装置,通过静电吸盘进行保持。进行基板63与掩模的对准,在基板63的配置发出红色的元件的部分形成发出红色的发光层66r。
147.与发光层66r的成膜同样地,通过第3有机材料成膜装置形成发出绿色的发光层66g,然后通过第4有机材料成膜装置形成发出蓝色的发光层66b。在发光层66r、66g、66b的成膜完成之后,通过第5有机材料成膜装置在整个显示区域61形成电子传输层67。电子传输层67作为通用的层而形成于3色的发光层66r、66g、66b。
148.使形成至电子传输层67的基板63移动到金属性蒸镀材料成膜装置而形成阴极68。金属性蒸镀材料成膜装置既可以是蒸发加热方式的成膜装置,也可以是溅射方式的成膜装置。
149.根据本发明,在对绝缘层69、空穴传输层65、发光层66r、66g、66b、电子传输层67和/或阴极68进行成膜的工序中,在通过使掩模m与基板w接触或紧贴等的均热化工序使掩模m冷却之后,实施基板w与掩模m的对准。由此,即使掩模m被来自蒸镀源25的辐射热加热而
膨胀,由于通过均热化工序在对准工序之前进行冷却,因此也能够抑制基板w与掩模m的对准精度的降低,能够抑制成膜精度降低。
150.之后,将基板w移动到等离子cvd装置而形成保护层70,有机el显示装置60完成。
151.从将绝缘层69形成图案的基板63送入成膜装置起直到保护层70的成膜完成为止,若暴露在包含水分、氧的环境中,则由有机el材料构成的发光层有可能因水分、氧而劣化。因此,在本实施例中,成膜装置之间的基板63的送入送出在真空环境或者非活性气体环境下进行。
152.上述实施例是本发明的一例,本发明并不限定于上述实施例的结构,也可以在其技术思想的范围内适当地变形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1