具有制动装置的轨道式研磨机的制作方法
1.本发明涉及机床领域,特别是用于自动研磨的、由机器人辅助研磨的轨道式研磨机。
背景技术:
2.在机器人辅助的表面处理中,机床,例如研磨机或抛光机(例如以旋转磨削片作为研磨工具的电驱动研磨机)由操纵器(例如工业机器人)操纵。此外,机床能够以不同方式与操纵器的所谓tcp(工具中心点)耦合;实际上,所述操纵器通常可以任意调节机器的位置和方向并且例如在轨道上平行于工件表面地移动机床。工业机器人通常是位置可调的,这可实现tcp沿期望轨道的精确移动。利用单独的致动器能够独立于操纵器进行调节和保持机床与工件表面之间的加工力。
3.在许多情况下使用偏心式磨削机(轨道式研磨机、轨道式砂光机),在所述偏心式磨削机中,磨削片固定在安装盘上(垫板),其中,磨削盘围绕偏心设置的第一旋转轴旋转,所述第一旋转轴自身围绕位于中心的第二旋转轴旋转。轨道式研磨机本身是已知的(参见例如us6257970b1),因而此处不再讨论其工作原理。此外,已知能实现自动更换磨削片的装置(参见例如us8517799b2)。轨道式研磨机的问题是安装盘停止在不确定的位置,然而为了允许研磨盘的自动改变,在自动更换过程开始时安装盘位于确定的位置。另外,还会出现安装盘在关闭马达后仍旧相对长时间地转动,这延迟了更换过程的开始。
4.发明人的目的是改进现有的轨道式研磨机,以便更换磨削片的自动化过程变得更快和更可靠。
技术实现要素:
5.上述任务通过根据权利要求1所述的装置来实现。不同的实施方式和进一步改进在从属权利要求中给出。
6.以下描述一种具有机床和制动装置的装置,其中,所述机床具有用于收纳工具的偏心安装的可旋转的安装盘。按照本发明的一个实施例,制动装置具有固定在该机床上的框架、以第一端部固定在所述框架上的弹簧(特别是板弹簧)、以及与所述弹簧的第二端部连接的杠杆。所述制动装置还具有致动器,其构造为用于移动所述杠杆,其中,当所述杠杆运动时弹簧张紧并且所述杠杆的一部分压抵机床的安装盘。
附图说明
7.下面借助在附图中所示出的实例对本发明进行详细说明。这些图示不一定按比例绘制,并且本发明并不仅限于所示的方面。更确切地说,重要的是展示出基于本发明的基本原理。
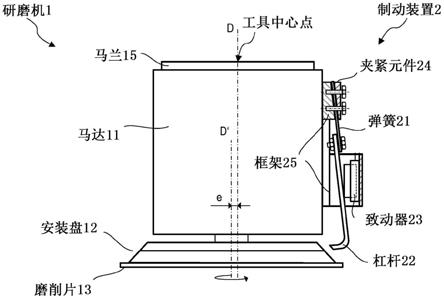
8.图1示出了根据一实施例的具有制动装置的轨道式研磨机的示例。
9.图2示出图1中的示例,其中制动装置被致动。
10.图3详细示出了制动装置(无研磨机)的示例。
具体实施方式
11.在详细说明本发明的不同实施例前,首先介绍一个机器人辅助的研磨装置的例子。应当理解,本发明概念也可以用于其他种类的表面处理(特别是抛光)并不仅限于研磨。
12.图1示出了具有制动装置的轨道式研磨机的示例。研磨机1主要包括用于驱动(在壳体中)偏心安装的安装盘12(垫板)的马达11,在所述安装盘上可固定磨削片13。安装盘12的偏心安装导致其在运行时围绕偏心的旋转轴d’旋转,所述偏心的旋转轴再围绕位于中心的旋转轴d旋转。磨削片13因此在其旋转的同时进行小的椭圆运动(在此期间椭圆轨道同样旋转)。轨道式研磨机的结构本身是已知的,因此这里不进一步解释。然而对于进一步的讨论重要的是,通过旋转轴d’的偏心距(旋转轴d和d’之间的距离)无法限定安装盘12的静止位置。当马达11关闭时,安装盘12继续运行一段时间并且可以停留在任何角度位置。
13.如上所提及的,如果安装盘12位于限定的角度位置,有利的是对磨削片13的自动的由机器人辅助的更换。根据此处描述的实施例,研磨机1具有制动装置2,其构造为用于制动安装盘12(关闭马达11)并且将所述安装盘压到限定的角度位置。图2示出与图1相同的实施例,其中制动器被致动。
14.根据图1和图2中示出的实施例,制动装置2包括弹簧21,特别是由弹簧钢制成的板弹簧。弹簧21的一个端部固定在制动装置2的框架25上,例如借助夹紧元件24。如图1所示,弹簧21固定在框架25的一部分和夹紧元件之间,所述夹紧元件可借助螺栓固定在框架25上。在弹簧21的另一端部上安装有杠杆22(例如同样借助螺栓),所述杠杆具有在其自由端部弯曲约90
°
的细长条(bar)形状。这样定位杠杆22和弹簧21,使得所述杠杆22的自由端部可以向安装盘12移动,直到所述杠杆22的自由的端部接触到安装盘12的圆周表面。在所述杠杆22这样移动时,弹簧弯曲。所述移动通过线性致动器23引起。所述线性致动器可以是气动的致动器,其例如可实施成囊式气缸(bellow cylinder)。备选地,可使用磁性的致动器,其例如可实施为电磁致动器(solenoid actuator)。与具体的实施方式无关,致动器23在框架25和杠杆22之间起作用。
15.特别地,通过板弹簧安装在框架25上的杠杆22与诸如囊式气缸的直接驱动装置(没有传动器和其他机构)的组合能实现制动装置(杠杆22、弹簧21)在无旋转接头的情况下运作。也就是,不需要包含有相互移动部件的机构。因此,制动装置2更加牢固且更不容易出错。囊式气缸也不包括相互移动的部件,仅气囊通过压缩空气充气,由此囊式气缸的端部压抵杠杆22。
16.当启动制动器时,致动器23压抵杠杆22并且与此同时所述杠杆22的自由、弯曲的端部也压抵安装盘12,其中,弹簧21弯曲并张紧。该情况在图2中示出。由此,杠杆22的自由、弯曲的端部压抵安装盘12,所述安装盘移动到限定的角度位置。偏心的转动轴d’被尽可能从制动装置2推开。在示出的例子中,制动装置设置在研磨机1的右侧并且通过所述启动的制动装置将偏心的转动轴尽可能向左推。同时制动所述安装盘12的可能的旋转运动,直到其静止。
17.图3在透视图中示出了制动装置2的示范性的实施方式。框架25具有多个部件并且构造为能够安装在研磨机上(参见图1和图2)。所述框架25包括底板25a(支座),所述底板的
外表面可以是适配于研磨机的外表面的(例如圆柱形的)。弹簧21借助夹紧元件24和螺栓24a固定在底板25a上。也就是说,实施为板弹簧的弹簧21被夹紧在底板25a的表面和夹紧元件24的相应的表面之间。螺栓24a提供所必须的压紧力。如在图1中所示,用螺丝拧紧杠杆22和弹簧21。所述杠杆22在某种程度上说可被视为板弹簧21的“延长”,其中,杠杆22相较于弹簧21是刚性的。
18.为了固定致动器23,框架25包括支架25b(bracket),所述支架被安装在底板25a上(例如借助螺栓25c)并且所述支架至少部分包围杠杆22。在所述支架25b上这样安装致动器23,使得所述致动器能够向底板25a挤压杠杆22(并因此在运行中压向研磨机)。在所示的例子中,借助螺栓25d在支架25b上这样固定致动器23,使得所述致动器能够向底板25a挤压杠杆22(并因此压向研磨机)。
19.理所当然,可以不同方式构造框架25。能够以多种方式改进图3中所示的结构,而不改变这里所描述的制动装置2的功能。框架因此被理解为任何结构性的组件或任何结构性组件的组合,所述组件或组件的组合适合于满足这里所描述的功能并且为此而构造,也就是特别地能够固定弹簧21的端部以及同样能够以某种方式安装致动器23,使得所述致动器能够移动在所述弹簧21上固定的杠杆22。框架是被设计为安装到研磨机上。
20.在下文中总结了在这里描述的实施例的一些重要的方面。这不应被理解为是详尽的,而仅仅是一些重要方面和技术特征的纯粹示例性列举。
21.此处描述的实施例涉及具有机床(特别是轨道式研磨机)和制动装置的装置,其中,所述机床具有用于收纳工具的偏心安装的可旋转的安装盘。根据一个实施例,制动装置具有固定在机床上的框架(参见例如图3,具有底板25a和安装支架25b的框架)、以第一端部固定在所述框架上的弹簧(参见例如图1和图2,板弹簧21)、以及与所述弹簧的第二端部连接的杠杆(参见例如图1至图3,杠杆22)。制动装置还具有致动器(参见例如图1至图3,气动的线性致动器23),其构造为用于移动所述杠杆,其中,当杠杆运动时弹簧张紧并且所述杠杆的一部分压抵机床的安装盘。如前所述,在此处描述的例子中的弹簧为板弹簧,所述板弹簧例如可以是由弹簧钢制成的,并且杠杆仅通过板弹簧与框架(例如与框架的底板)连接。
22.致动器可以是气动的或电气的直接驱动装置并且特别是不包含传动器或其他旋转部件。气动的直接驱动装置的例子为囊式气缸。
23.在一些实施例中,框架具有底板,弹簧的第一端部借助夹紧元件夹紧在所述底板上。框架可具有支架,所述支架固定在底板上,在该实施例中,致动器安装在所述支架上(参见图3,致动器23通过螺栓25d安装在支架25b上)。所述支架至少部分包围所述杠杆。在该实施例中,所述杠杆在安装状态下设置在安装于支架上的致动器和底板之间。
24.杠杆的端部可以是弯曲的,其中,在杠杆的由致动器导致的移动中,所述杠杆的弯曲的端部压抵机床的安装盘的圆周表面。由于杠杆的移动,所述杠杆压抵机床(研磨机)的安装盘,从而制动所述安装盘并将其推向限定的位置。
25.另一方面涉及杠杆的固有频率(参见图1至图3,杠杆22),与杠杆的几何形状和构成材料的刚性相关,所述杠杆具有一定的固有频率和附属的振动模式,其中,(即最低的)固有频率(即最低的频率)通常占主导地位。根据一个实施例这样构造杠杆,使得其占主固有频率在研磨机运行时不受到激发。也就是说,杠杆的固有频率高于研磨机的安装盘的指定的最大旋转频率(每秒钟旋转次数)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1