基于视觉检测的机器人去毛刺装置的制作方法
1.本发明涉及工业零件去毛刺系统,尤其涉及一种基于视觉检测的机器人去毛刺装置。
背景技术:
2.目前,金属零件在机械加工过程中会产生毛刺,这些毛刺的存在不仅影响零件的外观,还会影响到后续使用、装配、性能和使用寿命,因而零件的去毛刺工作非常重要;现有的去毛刺的方法主要是通过手工、机械加工等方式。但是,传统的这些方法去毛刺具的刀头因与零件接触力过大而崩断,影响工作效率,造成损失。
3.为此,需要提供一种基于视觉检测的机器人去毛刺装置,以解决上述现有技术存在的问题。
技术实现要素:
4.本发明的目的是为了解决现有刀头因与零件接触力过大而崩断,影响工作效率的问题,而提出的一种基于视觉检测的机器人去毛刺装置。
5.为了实现上述目的,本发明采用了如下技术方案:一种基于视觉检测的机器人去毛刺装置,其包括工作台、设置在工作台的机器人系统、视觉检测系统,所述机器人系统包括机器人,所述机器人包括高速旋转轴、与所述高速旋转轴连接毛刺执行工具,所述去毛刺执行工具包括刀头、固定所述刀头的刀轴、套在所述刀轴外的套筒以及设置在所述套筒内的弹性件,所述弹性件套在所述刀轴外,所述刀头受力压缩所述弹性件。
6.所述套筒通过轴连接件与所述高速旋转轴固定,所述套筒内设有第一台阶部,所述刀轴包括上段和下段,所述下段的直径小于所述上段的直径,所述上段与所述下段的连接处形成一第二台阶部,所述弹性件上下两端与所述第一台阶部、所述第二台阶部相抵持。
7.所述视觉检测系统包括相机、光源及相机固定支架,所述相机固定支架固定在所述工作台上,所述相机固定支架上固定有光源,所述光源为环形结构,所述相机与所述相机固定支架固定,所述相机具有镜头,所述镜头处于环形结构中心区域。
8.所述工作台上还设有工件夹具,所述工件夹具位于毛刺执行工具下方。
9.所述工件夹具包括固定横杆、套接在所述固定横杆上的隔套、与所述固定横杆一端驱动连接的旋转驱动组件,所述旋转驱动组件带动所述固定横杆旋转。
10.所述固定横杆另一端设有支撑组件,所述支撑组件包括气缸、与所述气缸连接的调节杆、固定在所述调节杆末端的轴承件,所述固定横杆与所述轴承件转动连接。
11.综上所述,由于采用了上述技术方案,本发明的有益效果是:通过在套筒内设置弹性件,当刀头与零件毛刺的接触力过大,刀头受力压缩弹性件实现刀头的浮动,刀头与零件毛刺的接触力维持相对稳定,避免刀头因接触力过大而崩断。
附图说明
12.图1为本发明中冷风机正面结构示意图;
13.图2为本发明中固定管内部结构示意图;
14.图3为本发明中a处放大结构示意图;
15.图4为本发明中冷源出口内部结构示意图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
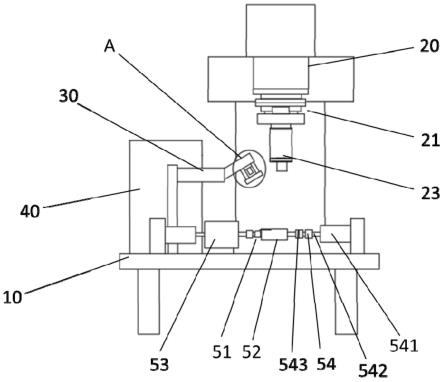
17.参照图1至图4,本发明为一种基于视觉检测的机器人去毛刺装置,其包括工作台10、设置在工作台10的机器人系统20、视觉检测系统30以及plc控制模块40。
18.参见图2及图3,机器人系统20包括机器人21、机器人控制器22和示教器23,机器人21包括高速旋转轴211、安装于高速旋转轴211的毛刺执行工具212,去毛刺执行工具211包括刀头2111、固定刀头2111的刀轴2112、套在刀轴2112外的套筒2113以及设置在套筒2113内的弹性件2114,弹性件2114套在刀轴2112外,刀头2111受力压缩弹性件2114实现刀头2111的浮动。
19.参见图2,套筒2113通过轴连接件100与高速旋转轴211固定,套筒2113内设有第一台阶部2101,刀轴2112包括上段2102和下段2103,下段2102的直径大于上段2103的直径,上段2103与下段2103的连接处形成一第二台阶部2104,弹性件2114上下两端与第一台阶部2101、第二台阶部2104相抵持。
20.本实施例中,弹性件2114可以采用弹簧或蝶形弹簧。通过设置弹性件2114刀头2111在自动化去毛刺过程中,当刀头2111与零件毛刺的接触力过大,刀头2111受力压缩弹性件2114实现刀头2111的浮动,刀头2111与零件毛刺的接触力维持相对稳定,避免刀头2111因接触力过大而崩断。
21.参见图4,视觉检测系统30包括相机31、光源32及相机固定支架33,相机固定支架33固定在工作台10上,相机固定支架33上固定有光源32,光源32为环形结构,相机31与相机固定支架33固定,相机31具有镜头,镜头处于环形结构中心区域,便于相机31对下方的工件去毛刺过程拍照,通过设置光源32用于照射工件,为相机31提供合适亮度。
22.参见图1,工作台10上还设有工件夹具,工件夹具于毛刺执行工具212下方,具体包括固定横杆51、套接在固定横杆51上的隔套52、与固定横杆51一端驱动连接的旋转驱动组件53,旋转驱动组件53带动固定横杆51旋转,工件套在隔套52上,通过旋转工件,实现对工件整个表面进行毛刺处理。
23.固定横杆51另一端设有支撑组件54,防止固定横杆51称重过大而产生损坏,支撑组件54包括气缸541、与气缸541连接的调节杆542、固定在调节杆542末端的轴承件543,固定横杆51与轴承件543转动连接。
24.当需要安装工件,固定横杆51与轴承件543分开,气缸541带动调节杆542回收,工件从固定横杆51自由端穿设在隔套52上,之后将固定横杆51与调节杆542末端的轴承件543
连接,通过设置支撑组件54,分散固定横杆51的支撑力,提高固定横杆51的使用寿命。
25.plc控制模块40控制机器人系统20、视觉检测系统协调工作。
26.本发明,通过设置视觉检测系统30对工件去毛刺过程拍照,对获取的图像进行数据分析,当出现毛刺去除不测底情况,及时反馈信息给机器人系统,便于机器人系统进行路径调整;通过设置弹性件2114,当刀头2111与零件毛刺的接触力过大,刀头2111受力压缩弹性件2114实现刀头2111的浮动,刀头2111与零件毛刺的接触力维持相对稳定,避免刀头2111因接触力过大而崩断。
27.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种基于视觉检测的机器人去毛刺装置,其特征在于:其包括工作台、设置在工作台的机器人系统、视觉检测系统,所述机器人系统包括机器人,所述机器人包括高速旋转轴、与所述高速旋转轴连接毛刺执行工具,所述去毛刺执行工具包括刀头、固定所述刀头的刀轴、套在所述刀轴外的套筒以及设置在所述套筒内的弹性件,所述弹性件套在所述刀轴外,所述刀头受力压缩所述弹性件。2.根据权利要求1所述的基于视觉检测的机器人去毛刺装置,其特征在于:所述套筒通过轴连接件与所述高速旋转轴固定,所述套筒内设有第一台阶部,所述刀轴包括上段和下段,所述下段的直径小于所述上段的直径,所述上段与所述下段的连接处形成一第二台阶部,所述弹性件上下两端与所述第一台阶部、所述第二台阶部相抵持。3.根据权利要求1所述的基于视觉检测的机器人去毛刺装置,其特征在于:所述视觉检测系统包括相机、光源及相机固定支架,所述相机固定支架固定在所述工作台上,所述相机固定支架上固定有光源,所述光源为环形结构,所述相机与所述相机固定支架固定,所述相机具有镜头,所述镜头处于环形结构中心区域。4.根据权利要求1所述的基于视觉检测的机器人去毛刺装置,其特征在于:所述工作台上还设有工件夹具,所述工件夹具位于毛刺执行工具下方。5.根据权利要求4所述的基于视觉检测的机器人去毛刺装置,其特征在于:所述工件夹具包括固定横杆、套接在所述固定横杆上的隔套、与所述固定横杆一端驱动连接的旋转驱动组件,所述旋转驱动组件带动所述固定横杆旋转。6.根据权利要求5所述的基于视觉检测的机器人去毛刺装置,其特征在于:所述固定横杆另一端设有支撑组件,所述支撑组件包括气缸、与所述气缸连接的调节杆、固定在所述调节杆末端的轴承件,所述固定横杆与所述轴承件转动连接。
技术总结
本发明公开了一种基于视觉检测的机器人去毛刺装置,其包括工作台、设置在工作台的机器人系统、视觉检测系统,所述机器人系统包括机器人,所述机器人包括高速旋转轴、与所述高速旋转轴连接毛刺执行工具,所述去毛刺执行工具包括刀头、固定所述刀头的刀轴、套在所述刀轴外的套筒以及设置在所述套筒内的弹性件,所述弹性件套在所述刀轴外,所述刀头受力压缩所述弹性件,如此,通过在套筒内设置弹性件,避免刀头因接触力过大而崩断。刀头因接触力过大而崩断。刀头因接触力过大而崩断。
技术研发人员:张军
受保护的技术使用者:万创(苏州)智能工业自动化有限公司
技术研发日:2021.04.30
技术公布日:2022/11/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1