一种眼镜镜框制造用后期外表层微精致处理设备的制作方法
1.本发明涉及一种眼镜镜框处理设备,尤其涉及一种眼镜镜框制造用后期外表层微精致处理设备。
背景技术:
2.眼镜框是眼镜的重要组成部分,主要起到支撑眼镜片的作用,外观漂亮的眼镜框可起到美观的作用,眼镜框在进行加工时,人们会对眼镜框上的毛刺进行打磨,使得眼镜框更加光滑,增加眼镜框的美观,同时也避免了毛刺刺伤人们,现有的眼镜框打磨机在使用时,打磨产生的灰尘容易四处飞散,容易被人们吸入肺部,同时飞散在空气中容易对空气造成污染,现有的打磨机需要人工手动握住眼镜框,这样就不能对所有毛刺进行处理,还容易刺伤人手。
3.专利申请:cn213592525u,公开日为20210702,公开了眼镜框打磨机,通过人们可以将眼镜框拿住放置于网状工作台的上方位置通过砂带对眼镜框上的毛刺进行打磨,在打磨时,人们可以转动旋转支撑臂将led灯板的电路闭合,使得led灯板工作将光线照射在眼镜框与砂带接触的部位,该装置通过人们手动拿出镜框进行打磨,容易使得毛刺刺伤人手,同时人们手动打磨容易造成打磨过度的情况。
4.因此,特别需要设计一种打磨精度高、自动传送和自动抽尘的眼镜镜框制造用后期外表层微精致处理设备,以解决现有技术中存在的问题。
技术实现要素:
5.针对现有技术的不足,本发明提供一种打磨精度高、自动打磨和自动抽尘的眼镜镜框制造用后期外表层微精致处理设备,以克服现有的镜框打磨机需要手动打磨和容易造成灰尘飞散的缺点。
6.为实现以上目的,本发明通过以下方案予以实现:一种眼镜镜框制造用后期外表层微精致处理设备,包括有底架、安装壳体、盛放桶、搅动机构、移位机构、下压机构和夹紧机构,底架上部设有安装壳体,底架与安装壳体之间设有搅动机构,搅动机构包括有第一固定块、搅动盘、接触开关、第一电机架和第一减速电机,底架中间前后两侧对称设有共四个第一固定块,四个第一固定块之间设有盛放桶,安装壳体前部左侧设有接触开关,盛放桶下部中间设有第一电机架,第一电机架上安装有第一减速电机,第一减速电机输出轴与盛放桶转动式连接,第一减速电机输出轴上连接有对细沙进行搅动的搅动盘,搅动盘与盛放桶转动式连接,安装壳体内设有带动镜框移动的移位机构,移位机构与安装壳体之间设有带动镜框向下移动与细沙接触的下压机构,下压机构与移位机构之间设有自动夹紧镜框的夹紧机构。
7.作为上述方案的改进,移位机构包括有第一固定架、第一支撑架、第一导向杆、丝杆、第二减速电机、第一距离传感器、第二距离传感器、移动架和第二固定架,安装壳体内前侧设有第一固定架,第一固定架中间安装有第二减速电机,安装壳体内后侧设有第一支撑
架,第一支撑架与第一固定架上侧之间连接有第一导向杆,第二减速电机输出轴上连接有丝杆,丝杆与第一支撑架转动式连接,第一支撑架前部中间设有第一距离传感器,安装壳体内前侧偏下侧设有第二固定架,第二固定架前部中间设有第二距离传感器,第一导向杆上滑动式设有移动架,移动架与丝杆螺纹式连接。
8.作为上述方案的改进,下压机构包括有第三距离传感器、第四距离传感器、第二支撑架、第一电动推杆、伸缩杆、压块、滑杆、弹簧、第一连接板、滚轮和第二连接板,安装壳体内左部后侧设有第三距离传感器,安装壳体内左部前侧设有第四距离传感器,安装壳体内上侧设有第二支撑架,第二支撑架中间安装有第一电动推杆,第二支撑架前后两侧均均匀设有三个伸缩杆,伸缩杆有六个,第一电动推杆伸缩杆上连接有压块,六个伸缩杆均与压块连接,移动架左右两侧均滑动式设有滑杆,两个滑杆上部之间连接有第一连接板,第一连接板下部左右两侧与移动架之间均连接有弹簧,弹簧绕在滑杆上,两个滑杆下部之间连接有第二连接板,第一连接板上转动式设有滚轮,滚轮与压块接触。
9.作为上述方案的改进,夹紧机构包括有第一连接块、第二连接块、支撑块、移动块、第二导向杆、第一转轴、直齿轮、第五距离传感器、第一齿条、第二齿条、夹块、第二固定块、第二电动推杆和第三连接块,移动架右部设有第一连接块,第一连接块下侧设有第五距离传感器,第二连接板下部左右两侧均设有第二连接块,两个第二连接块之间连接有支撑块,支撑块中间转动式设有第一转轴,第一转轴上设有直齿轮,支撑块上侧设有第二导向杆,第二导向杆前后两侧均滑动式设有移动块,前侧的移动块左侧设有第一齿条,第一齿条与直齿轮啮合,后侧的移动块右侧设有第二齿条,第二齿条与直齿轮啮合,两个移动块下侧均设有夹块,支撑块下部前侧设有第二固定块,第二固定块上安装有第二电动推杆,第二电动推杆伸缩杆上连接有第三连接块,第三连接块与后侧的移动块连接。
10.作为上述方案的改进,还包括有第一运送机构,第一运送机构包括有第一固定板块、第二转轴、第三转轴、第一运送皮带、第二电机架和第三减速电机,安装壳体内底部左右两侧均设有第一固定板块,两个第一固定板块前侧之间转动式连接有第二转轴,两个第一固定板块后侧之间转动式连接有第三转轴,第三转轴与第二转轴之间通过传动轮绕有第一运送皮带,底架前部下侧设有第二电机架,第二电机架前侧安装有第三减速电机,第三减速电机输出轴与第二转轴连接。
11.作为上述方案的改进,还包括有第二运送机构,第二运送机构包括有第二固定板块、第四转轴、压轮、第二运送皮带、光电传感器、第三电机架和第四减速电机,安装壳体内底部左右两侧均设有第二固定板块,两个第二固定板块之间前后两侧均转动式设有第四转轴,两个第四转轴之间通过传动轮绕有第二运送皮带,两个第二固定板块之间均匀转动式设有五个压轮,左侧的第二固定板块右部前侧设有光电传感器,安装壳体后部左侧设有第三电机架,第三电机架上安装有第四减速电机,第四减速电机输出轴与后侧的第四转轴连接。
12.作为上述方案的改进,还包括有吸尘机构,吸尘机构包括有第三固定板、第三支撑架、储尘桶、导气管、抽气头和气泵,安装壳体上部后侧设有第三固定板,第三固定板上部设有第三支撑架,第三支撑架上设有储尘桶,储尘桶下部设有导气管,导气管穿过第三支撑架与第三固定板连接,导气管下侧设有九个抽气头,导气管上侧设有气泵。
13.作为上述方案的改进,还包括有控制箱,安装壳体前部左侧安装有控制箱,控制箱
内安装有开关电源、电源模块和控制模块,开关电源为本眼镜镜框制造用后期外表层微精致处理设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器、第二距离传感器、第三距离传感器、第四距离传感器、第五距离传感器、接触开关和光电传感器均与控制模块通过电性连接,第一减速电机、第一电动推杆、气泵、第二电动推杆、第三减速电机和第四减速电机均与控制模块通过继电器控制模块连接,第二减速电机与控制模块通过直流电机正反转模块连接。
14.相比现有技术,本发明的优点在于:1、本发明通过第一减速电机输出轴转动带动搅动盘转动,从而使得细沙运动,随后将镜框与细沙接触,使得转动的细沙对镜框进行打磨,这样就避免了毛刺刺伤人手,同时打磨精度高;
15.2、通过第一运送皮带转动带动镜框向后移动,随后夹块带动镜框与细沙接触,然后打磨完成的落在第二运送皮带上,转动的第二运送皮带带动镜框向后移动,以此实现了自动传送的效果,节省了人力;
16.3、当光电传感器感应到光线低于预设值时气泵启动,使得抽气口将灰尘通过导气管抽至储尘桶内,以此实现了自动抽尘的效果,使得镜框得到了清理。
附图说明
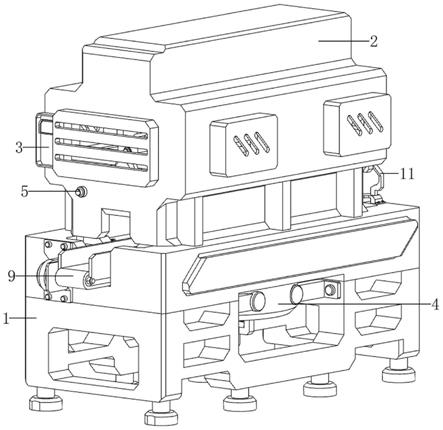
17.图1为本发明的立体结构示意图。
18.图2为本发明的剖视立体结构示意图。
19.图3为本发明的搅动机构第一视角剖视立体结构示意图。
20.图4为本发明的搅动机构第二视角剖视立体结构示意图。
21.图5为本发明的移位机构第一视角剖视立体结构示意图。
22.图6为本发明的a处放大立体结构示意图。
23.图7为本发明的移位机构第二视角剖视立体结构示意图。
24.图8为本发明的下压机构剖视立体结构示意图。
25.图9为本发明的b处放大立体结构示意图。
26.图10为本发明的夹紧机构第一视角剖视立体结构示意图。
27.图11为本发明的夹紧机构立体结构示意图。
28.图12为本发明的夹紧机构第二视角剖视立体结构示意图。
29.图13为本发明的夹紧机构第三视角剖视立体结构示意图。
30.图14为本发明的第一运送机构第一视角剖视立体结构示意图。
31.图15为本发明的第一运送机构第二视角剖视立体结构示意图。
32.图16为本发明的第二运送机构第一视角剖视立体结构示意图。
33.图17为本发明的c处放大立体结构示意图。
34.图18为本发明的第二运送机构第二视角剖视立体结构示意图。
35.图19为本发明的吸尘机构第一视角剖视立体结构示意图。
36.图20为本发明的吸尘机构第二视角剖视立体结构示意图。
37.图21为本发明的电路框图。
38.图22为本发明的电路原理图。
39.附图标记说明:1_底架,2_安装壳体,3_控制箱,4_盛放桶,5_搅动机构,51_第一固定块,52_搅动盘,53_接触开关,54_第一电机架,55_第一减速电机,6_移位机构,61_第一固定架,62_第一支撑架,63_第一导向杆,64_丝杆,65_第二减速电机,66_第一距离传感器,67_第二距离传感器,68_移动架,69_第二固定架,7_下压机构,71_第三距离传感器,72_第四距离传感器,73_第二支撑架,74_第一电动推杆,75_伸缩杆,76_压块,77_滑杆,78_弹簧,79_第一连接板,710_滚轮,711_第二连接板,8_夹紧机构,81_第一连接块,82_第二连接块,83_支撑块,84_移动块,85_第二导向杆,86_第一转轴,87_直齿轮,88_第五距离传感器,89_第一齿条,810_第二齿条,811_夹块,812_第二固定块,813_第二电动推杆,814_第三连接块,9_第一运送机构,91_第一固定板块,92_第二转轴,93_第三转轴,94_第一运送皮带,95_第二电机架,96_第三减速电机,10_第二运送机构,101_第二固定板块,102_第四转轴,103_压轮,104_第二运送皮带,105_光电传感器,106_第三电机架,107_第四减速电机,11_吸尘机构,111_第三固定板,112_第三支撑架,113_储尘桶,114_导气管,115_抽气口,116_气泵。
具体实施方式
40.下面,结合附图以及具体实施方式,对本发明做进一步描述:
41.如图1-图2所示的一种眼镜镜框制造用后期外表层微精致处理设备,包括有底架1、安装壳体2、盛放桶4、搅动机构5、移位机构6、下压机构7和夹紧机构8,底架1上部设有安装壳体2,底架1与安装壳体2之间设有搅动机构5,搅动机构5上设有盛放桶4,盛放桶4用于盛装细沙,安装壳体2内设有移位机构6,移位机构6与安装壳体2之间设有下压机构7,下压机构7与移位机构6之间设有夹紧机构8。
42.如图1-图4所示,搅动机构5包括有第一固定块51、搅动盘52、接触开关53、第一电机架54和第一减速电机55,底架1中间前后两侧对称通过螺栓固接有共四个第一固定块51,四个第一固定块51均与盛放桶4连接,安装壳体2前部左侧设有接触开关53,盛放桶4下部中间设有第一电机架54,第一电机架54上安装有第一减速电机55,第一减速电机55输出轴与盛放桶4转动式连接,第一减速电机55输出轴上连接有搅动盘52,搅动盘52与盛放桶4转动式连接。
43.如图1-图2和图5-图10所示,移位机构6包括有第一固定架61、第一支撑架62、第一导向杆63、丝杆64、第二减速电机65、第一距离传感器66、第二距离传感器67、移动架68和第二固定架69,安装壳体2内前侧焊接有第一固定架61,第一固定架61中间安装有第二减速电机65,安装壳体2内后侧焊接有第一支撑架62,第一支撑架62与第一固定架61上侧之间连接有第一导向杆63,第二减速电机65输出轴上连接有丝杆64,丝杆64与第一支撑架62通过轴承座连接,第一支撑架62前部中间设有第一距离传感器66,安装壳体2内前侧偏下侧设有第二固定架69,第二固定架69前部中间设有第二距离传感器67,第一导向杆63上滑动式设有移动架68,移动架68与丝杆64螺纹式连接。
44.如图1-图2和图8-图13所示,下压机构7包括有第三距离传感器71、第四距离传感器72、第二支撑架73、第一电动推杆74、伸缩杆75、压块76、滑杆77、弹簧78、第一连接板79、滚轮710和第二连接板711,安装壳体2内左部后侧设有第三距离传感器71,安装壳体2内左部前侧设有第四距离传感器72,安装壳体2内上侧设有第二支撑架73,第二支撑架73中间安装有第一电动推杆74,第二支撑架73前后两侧均均匀设有三个伸缩杆75,伸缩杆75有六个,
第一电动推杆74伸缩杆上连接有压块76,六个伸缩杆75均与压块76连接,移动架68左右两侧均滑动式设有滑杆77,两个滑杆77上部之间连接有第一连接板79,第一连接板79下部左右两侧与移动架68之间均连接有弹簧78,弹簧78绕在滑杆77上,两个滑杆77下部之间焊接有第二连接板711,第一连接板79上转动式设有滚轮710,滚轮710与压块76接触。
45.如图1-图2和图10-图13所示,夹紧机构8包括有第一连接块81、第二连接块82、支撑块83、移动块84、第二导向杆85、第一转轴86、直齿轮87、第五距离传感器88、第一齿条89、第二齿条810、夹块811、第二固定块812、第二电动推杆813和第三连接块814,移动架68右部设有第一连接块81,第一连接块81下侧设有第五距离传感器88,第二连接板711下部左右两侧均通过螺栓固接有第二连接块82,两个第二连接块82之间连接有支撑块83,支撑块83中间通过轴承连接有第一转轴86,第一转轴86上通过键连接有直齿轮87,支撑块83上侧设有第二导向杆85,第二导向杆85前后两侧均滑动式设有移动块84,前侧的移动块84左侧设有第一齿条89,第一齿条89与直齿轮87啮合,后侧的移动块84右侧设有第二齿条810,第二齿条810与直齿轮87啮合,两个移动块84下侧均设有夹块811,夹块811用于对镜框进行夹紧,支撑块83下部前侧设有第二固定块812,第二固定块812上安装有第二电动推杆813,第二电动推杆813伸缩杆上连接有第三连接块814,第三连接块814与后侧的移动块84连接。
46.当人们需要对眼睛镜框进行微处理时,人们可以使用这种眼镜镜框制造用后期外表层微精致处理设备,首先人们将细沙倒入至盛放桶4内,随后人们按下电源总开关,将本设备上电,上电后人们按下接触开关53,控制模块控制第一减速电机55输出轴转动,第一减速电机55输出轴带动搅动盘52转动,从而使得细沙在盛放桶4内运动,随后人们在安装壳体2前侧手托着镜框向后移至第二距离传感器67前侧,当第二距离传感器67感应到与镜框之间的距离达到预设值时,使得控制模块控制第二减速电机65输出轴延迟五秒后转动,同时控制模块控制第一电动推杆74伸缩杆向下伸长两秒后停止一秒随即向上缩短两秒后关闭,第一电动推杆74伸缩杆带动压块76向下移动,从而使得伸缩杆75被拉伸,使得滚轮710和第一连接板79向下移动,进而弹簧78被压缩,使得滑杆77和第二连接板711向下移动,继而第二连接块82和支撑块83向下移动,使得夹块811向下移动,当第五距离传感器88感应到与右侧的第二连接块82之间的距离达到预设值时,控制模块控制第二电动推杆813伸缩杆向前缩短一秒后关闭,第二电动推杆813伸缩杆带动第三连接块814向前移动,从而使得后侧的移动块84和后侧的夹块811向前移动,使得第二齿条810向前移动,进而第一转轴86和直齿轮87转动,使得第一齿条89向后移动,继而前侧的移动块84和前侧的夹块811向后移动,使得两个夹块811将镜框夹住,此时第一电动推杆74伸缩杆已停止一秒,然后第一电动推杆74伸缩杆带动压块76向上移动,从而使得伸缩杆75被压缩,使得弹簧78复位带动第一连接板79和滑杆77向上移动,进而滚轮710向上移动,使得第二连接板711向上移动,继而第二连接块82和支撑块83向上移动,使得夹块811夹着镜框向上移动,此时第二减速电机65输出轴已延迟五秒,使得控制模块控制第二减速电机65输出轴带动丝杆64转动,从而使得移动架68沿着第一导向杆63向后移动,使得第一连接板79向后移动,进而滚轮710在压块76下侧转动,使得第二连接板711和第二连接块82向后移动,继而支撑块83向后移动,使得夹块811带动镜框向后移动,当第四距离传感器72感应到与第二连接板711之间的距离达到预设值时,控制模块控制第一电动推杆74伸缩杆向下伸长两秒后关闭,第一电动推杆74伸缩杆带动压块76向下移动,从而使得伸缩杆75被拉伸,使得滚轮710和第一连接板79向下移动,进而弹
簧78被压缩,使得滑杆77和第二连接板711向下移动,继而第二连接块82和支撑块83向下移动,使得夹块811和镜框向下移动,当镜框与细沙接触时,运动的细沙对镜框进行打磨,以此实现了自动处理的效果,此时移动架68正在继续向后移动,使得滚轮710在压块76下侧转动,当第三距离传感器71感应到与左侧的滑杆77之间的距离达到预设值时,控制模块控制第一电动推杆74伸缩杆向上缩短两秒后关闭,第一电动推杆74伸缩杆带动压块76向上移动,从而使得伸缩杆75被压缩,使得弹簧78复位带动第一连接板79和滑杆77向上移动,进而滚轮710向上移动,使得第二连接板711向上移动,继而第二连接块82和支撑块83向上移动,使得夹块811夹着镜框向上移动,移动架68继续带动夹块811和镜框向后移动,第一距离传感器66预设值设置有第一预设值和第二预设值,第一预设值比第二预设值小,当第一距离传感器66感应到与移动块84之间的距离达到第一预设值时,控制模块控制第二减速电机65输出轴停止转动,五秒后,控制模块控制第二减速电机65输出轴反向转动,同时控制模块控制第一电动推杆74伸缩杆向下伸长两秒后停止一秒随即向上缩短两秒后关闭,第一电动推杆74伸缩杆带动压块76向下移动,从而使得伸缩杆75被拉伸,使得滚轮710和第一连接板79向下移动,进而弹簧78被压缩,使得滑杆77和第二连接板711向下移动,继而第二连接块82和支撑块83向下移动,使得夹块811和镜框向下移动,当第五距离传感器88再次感应到与右侧的第二连接块82之间的距离达到预设值时,控制模块控制第二电动推杆813伸缩杆向后伸长一秒后关闭,第二电动推杆813伸缩杆带动第三连接块814向后移动,从而使得后侧的移动块84和后侧的夹块811向后移动,使得第二齿条810向后移动,进而第一转轴86和直齿轮87反向转动,使得第一齿条89向前移动,继而前侧的移动块84和前侧的夹块811向前移动,此时人们在夹块811下侧收集打磨完成的镜框,当第一电动推杆74伸缩杆停止一秒后,第一电动推杆74伸缩杆带动压块76向上移动,从而使得伸缩杆75被压缩,使得弹簧78复位带动第一连接板79和滑杆77向上移动,进而滚轮710向上移动,使得第二连接板711向上移动,继而第二连接块82和支撑块83向上移动,使得夹块811向上移动,此时第二减速电机65输出轴已停止五秒,使得第二减速电机65输出轴反向转动带动丝杆64反向转动,从而使得移动架68沿着第一导向杆63向前移动,使得夹块811向前移动,当第一距离传感器66感应到与移动架68之间的距离达到第二预设值时,控制模块控制第二减速电机65和第一减速电机55输出轴关闭,当人们需要对下一个镜框进行处理时,人们可再次按下接触开关53,当人们不需要对镜框进行处理时,人们可再次手动按下电源总开关,将本设备断电。
47.如图1-图2和图14-图15所示,还包括有第一运送机构9,第一运送机构9包括有第一固定板块91、第二转轴92、第三转轴93、第一运送皮带94、第二电机架95和第三减速电机96,安装壳体2内底部左右两侧均设有第一固定板块91,两个第一固定板块91前侧之间通过轴承连接有第二转轴92,两个第一固定板块91后侧之间通过轴承连接有第三转轴93,第三转轴93与第二转轴92之间通过传动轮绕有第一运送皮带94,底架1前部下侧通过螺栓固接有第二电机架95,第二电机架95前侧通过螺栓安装有第三减速电机96,第三减速电机96输出轴与第二转轴92通过联轴器连接。
48.人们手动按下接触开关53后,控制模块同时控制第三减速电机96输出轴转动,第三减速电机96输出轴带动第二转轴92转动,从而使得第一运送皮带94转动,使得第三转轴93转动,此时人们将需要进行处理的镜框放置在第一运送皮带94上,进而第一运送皮带94带动镜框向后移动,以此实现了自动传送的效果,当第二距离传感器67感应到与镜框之间
的距离达到预设值时,控制模块控制第三减速电机96关闭。
49.如图1-图2和图16-图18所示,还包括有第二运送机构10,第二运送机构10包括有第二固定板块101、第四转轴102、压轮103、第二运送皮带104、光电传感器105、第三电机架106和第四减速电机107,安装壳体2内底部左右两侧均设有第二固定板块101,两个第二固定板块101之间前后两侧均通过轴承连接有第四转轴102,两个第四转轴102之间通过传动轮绕有第二运送皮带104,两个第二固定板块101之间均匀转动式设有五个压轮103,左侧的第二固定板块101右部前侧设有光电传感器105,安装壳体2后部左侧通过螺栓连接有第三电机架106,第三电机架106上通过螺栓安装有第四减速电机107,第四减速电机107输出轴与后侧的第四转轴102通过联轴器连接。
50.当两个夹块811向外侧移动时,镜框落在第二运送皮带104上,当光电传感器105感应到光线低于预设值时,控制模块控制第四减速电机107输出轴转动四秒后关闭,第四减速电机107输出轴带动后侧的第四转轴102转动,从而使得第二运送皮带104和前侧的第四转轴102转动,使得镜框向后移动,当镜框移动至压轮103下侧时,压轮103转动对镜框进行挤压,同时镜框向后移动,然后人们在安装壳体2后侧收集镜框。
51.如图1-图2和图19-图20所示,还包括有吸尘机构11,吸尘机构11包括有第三固定板111、第三支撑架112、储尘桶113、导气管114、抽气头和气泵116,安装壳体2上部后侧设有第三固定板111,第三固定板111上部设有第三支撑架112,第三支撑架112上设有储尘桶113,储尘桶113下部设有导气管114,导气管114穿过第三支撑架112与第三固定板111连接,导气管114下侧设有九个抽气头,导气管114上侧设有气泵116。
52.当光电传感器105感应到光线低于预设值时,控制模块控制气泵116启动四秒后关闭,使得抽气头将镜框上的灰尘通过导气管114抽至储尘桶113内,随后灰尘在储尘桶113内沉淀,镜框在压轮103下侧移动时,镜框带动压轮103转动,从而使得压轮103对镜框进行挤压,避免了镜框被气体抽走,从而将镜框上残留的灰尘抽走,以此实现了吸尘的效果。
53.如图1-图2和图21-图22所示,还包括有控制箱3,安装壳体2前部左侧安装有控制箱3,控制箱3内安装有开关电源、电源模块和控制模块,开关电源为本眼镜镜框制造用后期外表层微精致处理设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器66、第二距离传感器67、第三距离传感器71、第四距离传感器72、第五距离传感器88、接触开关53和光电传感器105均与控制模块通过电性连接,第一减速电机55、第一电动推杆74、气泵116、第二电动推杆813、第三减速电机96和第四减速电机107均与控制模块通过继电器控制模块连接,第二减速电机65与控制模块通过直流电机正反转模块连接。
54.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1