一种砂箱内壁清扫装置的制作方法
1.本实用新型涉及一种铸造装置领域,特别是涉及一种砂箱内壁清扫装置。
背景技术:
2.铸造作业完成后需要将砂箱内的型砂清理出来,即进行落沙。将大量型砂倾倒出后,还需要对砂箱的内壁进行清扫处理,为后续铸造使用作准备。砂箱内壁上粘附的沙与壁体粘附较为紧实,不易分离。
3.以往,清理砂箱内壁上粘附的型砂多是工人使用清扫工具进行清理,不仅费时、费力,而且还对铸造生产线的工作效率造成了不利影响。
4.鉴于当前用工成本不断增加的趋势,亟待设计一种结构简单,能够解放工人的清扫工作量,实现省时、省力目的的砂箱内壁清扫装置。
技术实现要素:
5.为实现上述目的,本实用新型提供了一种砂箱内壁清扫装置,其能够可靠地将砂箱内部上粘附的型砂清理干净,不仅能降低工人清理砂箱工作的劳动强度,提高清理工作效率,而且有助于融合进铸造自动化生产线,实现铸造生产流水线全面自动化或半自动化,降低用工成本。
6.为此,本实用新型的技术方案是,一种砂箱内壁清扫装置,包括通过直线型滑轨安装在机架上的承载座、与所述承载座通过直线型滑轨结构相匹配的装配座、安装在所述装配座上的升降机构以及装在所述升降机构下部的毛刷。
7.所述装配座相对所述承载座作往复移动的方向与所述承载座相对所述机架作往复移动的方向相对垂直。
8.所述承载座相对机架的往复移动、所述装配座相对所述承载座的往复移动均在水平面内,两个水平面相对平行。
9.进一步,所述承载座与机架之间和/或所述装配座与所述承载座之间通过丝杠滑块结构匹配,而使得所述承载座能够相对机架作往复移动,所述装配座能够相对所述承载座作往复移动。
10.进一步,所述升降机构为齿轮齿条传动机构。其中,与电机匹配的齿轮装在所述装配座内,与齿轮啮合的齿条沿竖直方向布置,在所述齿条两侧设有沿竖直方向的导向柱使得所述齿条能够相对所述装配座沿竖直方向往复移动。
11.进一步,所述升降机构的下部装有电机箱,该电机箱的下部设有套筒,该套筒内装有与毛刷的臂连接的传动轴。所述电机箱内设有与所述传动轴匹配的驱动电机。所述传动轴能够使得所述毛刷绕竖直方向的轴线旋转。所述传动轴的下端延伸出所述套筒而与所述毛刷的臂连接。
12.进一步,所述毛刷的臂与所述传动轴的下端通过套装有扭簧的转轴匹配,使得所述臂能够保持在与竖直方向成不小于90度夹角的状态,一般该夹角通过调节使其保持在相
对竖直方向成95度夹角至110度夹角的状态。当所述毛刷与砂箱的内壁作用,对砂箱壁上的型砂进行清扫时,所述臂能够相对竖直方向在其保持状态夹角范围的正负10到15度区间变动,也就是说所述臂能够在短时内相对竖直方向成小于90度夹角的状态。
13.进一步,所述转轴的端部安装有拨杆。所述套筒的上装有传感器。所述拨杆的自由端探入所述传感器内。所述臂带动所述转轴旋转时,所述拨杆的自由端能够在竖直平面内摆动而形成传感信号。借助所述传感器反馈的传感信号,处理器能够对外显示出所述臂摆动幅度的变化大小,进而能判断出对砂箱内壁上粘附的型砂的清扫状况,当砂箱内壁上仍粘附有较多的型砂时,所述臂的摆动幅度会较大,当砂箱内壁上粘附的型砂较少时(也没有局部大量集中的情形),所述臂的摆动幅度就会很小,继而能够判断是不是应该停止对相应壁面的清扫操作。
14.进一步,所述毛刷呈长条状,而且其上的刷毛相对承载刷毛的杆/板向两端外均有延伸。所述毛刷的长度不大于砂箱内槽的宽度,毛刷作用于砂箱内槽的长度向壁面时,至少需要有两个横向移位方能够顾及到整个长度向的内槽面。
15.本实用新型有益效果是,本实用新型能够可靠地将砂箱内壁上粘附的型砂清理干净,不仅能降低工人清理砂箱工作的劳动强度,提高清理工作效率,而且有助于融合进铸造自动化生产线,实现铸造生产流水线全面自动化或半自动化,降低用工成本。
附图说明
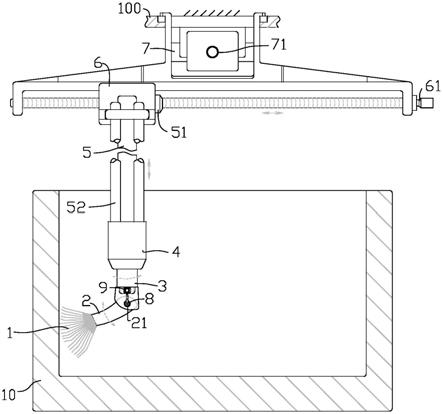
16.图1是本实用新型所形成某种实施方案的结构示意图。
17.图中符号说明:100机架,10砂箱,1毛刷,2臂,21转轴,3套筒,4电机箱,5齿条,51第一电机,52导向柱,6装配座,61第二电机,7承载座,71第三电机,8拨杆,9传感器。
具体实施方式
18.下面结合实施例对本实用新型做进一步描述。
19.图1是本实用新型所涉及到的一种具体实施结构。
20.一种砂箱内壁清扫装置,包括通过直线型滑轨安装在机架100上的承载座7、与所述承载座7通过直线型滑轨结构相匹配的装配座6、安装在所述装配座6上的升降机构以及装在所述升降机构下部的毛刷1。
21.如图所示,所述升降机构为齿轮齿条传动机构。其中,与第一电机51匹配的齿轮装在所述装配座6内,与齿轮啮合的齿条5沿竖直方向布置,在所述齿条5两侧设有沿竖直方向的导向柱52使得所述齿条5能够相对所述装配座6沿竖直方向往复移动。所述导向柱52的下端固定在所述电机箱4上,所述导向柱52的上端穿出在所述装配座6上设置的横臂。当所述齿条5向上移动时,所述导向柱52的上端相对横臂向上移动;当所述齿条5向下移动时,所述导向柱52的上端逐渐靠近横臂。
22.所述装配座6相对所述承载座7作往复移动的方向(左右向)与所述承载座7相对所述机架100作往复移动的方向(垂直纸面的方向)相对垂直。
23.所述承载座7与机架100之间、所述装配座6与所述承载座7之间通过丝杠滑块结构匹配,而使得所述承载座7能够相对机架100作往复移动,所述装配座6能够相对所述承载座7作往复移动。
24.第二电机61驱动所述装配座6相对所述承载座7在水平面内(沿左右方向)作往复移动。第三电机71驱动所述承载座7相对机架100在水平面内(沿垂直纸面的方向)作往复移动。装配座6所处的水平面相对承载座所处的水平面相对平行。
25.所述齿条5的下部装有电机箱4,该电机箱4的下部设有套筒3,该套筒3内装有与毛刷1的臂2连接的传动轴。所述电机箱4内设有与所述传动轴匹配的驱动电机。所述传动轴能够使得所述毛刷1绕竖直方向的轴线旋转。所述传动轴的下端延伸出所述套筒而与所述毛刷1的臂2连接。
26.所述毛刷1的臂2与所述传动轴的下端通过套装有扭簧的转轴21匹配,使得所述臂2能够保持在与竖直方向成不小于90度夹角的状态,一般该夹角通过调节使其保持在相对竖直方向成95度夹角至110度夹角的状态,如图示的93度夹角状态。
27.当所述毛刷1与砂箱的内壁作用,对砂箱壁上的型砂进行清扫时,所述臂2能够相对竖直方向在其保持状态夹角范围的正负10到15度区间变动,也就是说所述臂2能够在短时内相对竖直方向成小于90度夹角的状态。
28.所述转轴21的端部安装有拨杆8。所述套筒3的上装有传感器9。所述拨杆8的自由端探入所述传感器9内。所述臂2带动所述转轴21旋转时,所述拨杆8的自由端能够在竖直平面内摆动而(在传感器中)形成传感信号。借助所述传感器反馈的传感信号,处理器能够对外显示出所述臂2摆动幅度的变化大小,进而能判断出对砂箱内壁上粘附的型砂的清扫状况,当砂箱内壁上仍粘附有较多的型砂时,所述臂的摆动幅度会较大,当砂箱内壁上粘附的型砂较少时(也没有局部大量集中的情形),所述臂的摆动幅度就会很小,继而能够判断是不是应该停止对相应壁面的清扫操作。
29.所述毛刷1呈长条状,而且其上的刷毛相对承载刷毛的杆/板向两端外均有延伸。所述毛刷的长度不大于砂箱内槽的宽度,毛刷作用于砂箱内槽的长度向壁面时,至少需要有两个横向移位方能够顾及到整个长度向的内槽面。
30.所述电机箱4内的电机能够通过传动轴带动所述臂2或说毛刷1旋转,而选择地使所述毛刷朝向砂箱的两宽度向内壁面和两长度向内壁面。
31.借助所述第二电机61驱动装配座6沿左右方向移动,能够使毛刷1靠近和远离砂箱的宽度向内壁面。
32.借助所述第三电机71驱动承载座7沿垂直纸面的方向移动,能够使毛刷1靠近和远离砂箱的长度向内壁面。
33.借助所述第一电机51带动着所述齿条5升降移动,而使毛刷1升降,而对砂箱的内部实现上下清扫。
34.作为改进方案,可在所述毛刷的附近设置吸尘口,吸尘器主机安装在所述装配座6上。吸尘器主机连接软管,将软管端口固定在毛刷附近形成吸尘口。这样在清扫砂箱内部上的型砂时能够及时将清扫下来的型砂吸走。
35.惟以上所述者,仅为本实用新型的具体实施例而已,当不能以此限定本实用新型实施的范围,故其等同组件的置换,或依本实用新型专利保护范围所作的等同变化与修改,皆应仍属本实用新型权利要求书涵盖之范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1