同时在多个微型压板之上的基板抛光的制作方法
同时在多个微型压板之上的基板抛光
1.相关技术的描述
2.本发明的方面总体涉及半导体器件的制造以及半导体器件的化学机械抛光和平面化。
背景技术:
技术领域
3.一种用于形成竖直和水平互连的方法采用镶嵌或双镶嵌方法。在镶嵌方法中,一种或多种介电材料(诸如低k介电材料)被沉积并图案化蚀刻以在其中或从中穿过形成竖直互连开口(即,通孔或接触开口)和水平互连开口(即,线)。然后将导电材料(诸如含铜材料)和其他材料(诸如用于防止含铜材料扩散到周围低k电介质中的阻挡层材料)沉积到蚀刻的开口中,以及不期望地沉积在图案化介电材料的上表面或场之上。然后去除在蚀刻的图案外部的任何多余含铜材料和多余阻挡层材料,诸如在基板上的介电层的场上的那些。
4.随着介电层、阻挡层和导电材料层顺序地沉积在基板上并被至少部分地去除,基板的最上表面可能使其表面上变成非平面并且需要平面化。将表面平面化或“抛光”表面是从基板的表面去除材料以形成大体上平坦、均匀、平面的表面的工艺。平面化在双镶嵌工艺中可用于去除沉积在场上的多余材料,以及为在其之上的后续金属化水平及其处理提供平坦、平面表面。平面化还可用于去除不期望的表面形貌和表面缺陷,诸如粗糙表面、结块材料、晶格损伤、划痕和污染的层或材料。
5.化学机械平面化或化学机械抛光(cmp)是用于将基板平面化的常见技术。在常规cmp技术中,基板载体或抛光头安装在载体组件上并且可定位成与cmp装置中的抛光制品(通称为抛光垫)接触。要抛光的基板安装在抛光头上。载体组件向基板提供可控制压力,从而将基板推靠在抛光制品上。抛光制品(例如,抛光垫)通过外部驱动力相对于基板移动,通常是围绕面向基板的垫的大区域的中心。通常在其中包括磨料的液体被分配到垫上以运输到在垫和基板的面对表面之间的界面。该材料通常被称为浆料,并且通常包括用于对被抛光的材料进行改性的化学试剂和用于从基板侵蚀掉改性的材料的磨料。因此,cmp装置在基板的表面与抛光制品之间进行抛光或摩擦运动,同时分散被称为浆料的抛光组合物,以进行化学活动和机械活动两者来从基板去除材料。
6.常规地,为了抛光铜特征,诸如其中铜存在于介电层中的开口中并且还在其场之上延伸的双镶嵌特征,含铜材料、以及阻挡层的在铜材料的沉积之前沉积到开口中并沉积到场上的部分被抛光到阻挡层的水平,并且然后使用磨料抛光解决方案将阻挡层与介电层的一部分和铜特征一起抛光到下面的介电层的水平。然而,这种抛光工艺通常造成通孔和线特征以及介电层中的铜的不均匀去除,从而造成形貌缺陷(诸如特征中的被称为凹窝的凹部或凹陷)的形成和在特征周围的介电材料的去除(被称为侵蚀)。
技术实现要素:
7.一方面,一种基板抛光装置包括处理站,所述处理站具有:多个抛光压板,每个抛光压板上具有抛光垫;以及基板支撑件,所述基板支撑件被配置为在其中保持基板,其中所述基板支撑件可定位成同时地将支撑在其中的基板抵靠所述多个抛光压板中的至少两个抛光压板上的抛光垫定位。
8.另一方面,提供了一种用于基板抛光的方法,并且所述方法包括:将基板定位在抛光站内,所述抛光站具有多个抛光压板,每个抛光压板上具有抛光垫,所述抛光压板和基板支撑件被配置为在其中保持基板;将所述基板支撑件定位成同时地将支撑在其中的基板抵靠所述多个抛光压板中的至少两个抛光压板上的所述抛光垫定位;以及在两个抛光垫上同时地抛光所述基板。
9.另一方面,一种抛光装置包括:第一抛光站;第二抛光站;以及基板支撑件,所述基板支撑件被配置为与抛光站以面对关系在其中支撑基板并且可移动以将支撑在其中的基板定位在所述第一抛光站和第二抛光站处,并且至少第一可旋转抛光压板和第二可旋转抛光压板设置在所述第一抛光站和所述第二抛光站中的一者中并且被配置为在其上支撑抛光垫,所述基板支撑件可定位成将支撑在其中的基板抵靠所述第一抛光压板上的抛光垫并同时地抵靠所述第二抛光站上的抛光垫接合。
附图说明
10.为了可详细地理解本公开内容的上述特征,可参考实施例来得到以上简要地概述的本公开内容的更特别的描述,实施例中的一些示出在附图中。然而,需注意,附图仅仅示出了示例性实施例,并且因此不应当被视为对其范围的限制,并且可允许其他等效实施例。
11.图1a是其示例性抛光装置的等距视图。
12.图1b描绘了化学机械抛光系统的一个实施例,该化学机械抛光系统具有接口,用于相对于其装载和卸载基板。
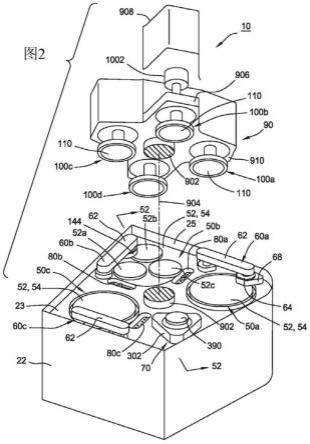
13.图2是图1的抛光装置的一部分的分解图。
14.图3是图1的抛光装置的抛光站的平面图。
15.图4a至图4c是关于多个抛光垫(例如,图3的单个抛光站中的多个抛光垫)的示例性基板运动的示意图。
16.图5是阐述可用于抛光基板的活动的流程图。
17.为了促成理解,已经尽可能使用相同的附图标记标示各图共有的相同要素。设想的是,实施例的要素和特征可有益地结合在其他实施例中,而无需进一步陈述。
具体实施方式
18.一般而言,本发明的方面提供了用于抛光基板同时减少基板表面的凹陷并且基本上没有剩余残余物的方法和装置。下面将参考用于使用包括例如抛光垫和浆料的抛光介质通过化学机械抛光(cmp)技术从基板表面去除导电材料(诸如含铜材料和阻挡层材料,诸如钽和氮化钽)的平面化工艺来描述本发明。化学机械抛光在本文中广义地定义为通过化学和机械活动的组合来抛光基板。
19.本文的平面化工艺可使用化学机械抛光工艺装备(诸如可从加利福尼亚州圣克拉
拉市应用材料公司(applied materials,inc.,of santa clara,calif.)获得的cmp系统)来执行,如名称为“method of chemical mechanical polishing with high throughput and low dishing”的美国专利第6,780,773号中所示和所述,该专利的全部内容在不与本发明不一致的程度上以引用方式并入本文。虽然使用cmp系统说明了cmp工艺和组合物,但是可有利地使用能够使用本文描述的方法进行抛光的任何系统,诸如可从加利福尼亚州圣克拉拉市应用材料公司(applied materials,inc.,of santa clara,calif.)获得的reflexion
tm cmp系统。以下装置描述是说明性的,并且不应被解释或理解为限制本发明的范围。
20.图1示出了抛光系统的透视图。抛光系统10包括与基板装载装置30相邻的抛光装置20。基板40在盒42中被带到系统10,该盒被立即储存在桶34中以便保持基板湿润。基板40从盒42单独装载到基板抛光装置20中,该装置抛光基板并然后将基板返回到原始盒42或桶34中的另一个盒。该图没有示出插置在抛光装置20与基板装载装置30之间的壁,该壁使得将浆料和其他抛光碎屑容纳在抛光装置20内并远离桶34。打开壁中未示出的滑动门,以用于在两个装置20和30之间传送基板。壁可充当包含基板装载装置30的清洁室和包含抛光装置20的较脏区域之间的屏障。
21.抛光装置20包括其上安装有台面23的下机器基部22和包围一系列抛光站50a、50b和50c的可移除上外覆盖物24。如图2的分解等距视图中所示,围堰或围栏25围绕台面23以容纳被抛掷出并通过台面中的未示出的排水管排出的液体和浆料。
22.每个抛光站50a、50b或50c包括至少一个可旋转压板52,其上放置有抛光垫54,并且它还包括相关联垫调节器装置60a、60b或60c,每个相关联垫调节器装置具有保持调节器头64的可旋转臂62和用于调节头64的相关联清洗盆68。这里的抛光站50b包括至少两个可旋转抛光压板,这里是三个压板52a、52b和52c。压板52a-c的抛光垫接收表面是共面的,或者其上的抛光垫54a-c的抛光表面是共面的,以允许一次同时在多于一个抛光垫上抛光基板40,例如同时在抛光垫54a-c中的任何两个或所有三个上抛光基板40。面对基板40的抛光垫54a-c的表面区域各自与要抛光的基板的表面的表面区域一样大或更大。基部22还支撑与三个抛光站50a、50b和50c呈正方形布置进行定位的传送站70。传送站70具有多种功能:从装载装置30接收单个基板40,可冲洗基板,将基板装载到在抛光期间保持基板的基板头(稍后描述),从基板头接收回基板40,清洗基板,并且最后将基板传送回装载装置30。它还在卸载基板头的基板后清洗基板头。
23.两个中间清洗站80a和80b位于抛光站50a、50b和50c中的相邻抛光站之间,并且第三清洗站80c可位于最后一个抛光站50c与传送站70之间。这些在基板40从一个抛光站传递到另一个抛光站以及到达传送站70时冲洗基板40,并且也可有效地磨光基板40。
24.可旋转多头转盘90包括四个基板头系统100a、100b、100c和100d,每个基板头系统接收并保持基板40并在相应抛光站50a、50b和50c处通过将基板压靠在保持在压板52上的相应抛光垫54上来支撑基板以抛光基板。由于去除了其臂之间的区域而呈十字形的转盘90被支撑在静止中心柱902上并且通过位于基部22内的马达组件在其上围绕转盘轴线904旋转。
25.在根据本发明的这种配置中,四个相同基板头系统100a、100b、100c和100d围绕转盘轴线904以相等角间隔安装在转盘支撑板906上。中心柱902在中心支撑转盘支撑板906并
允许转盘马达围绕转盘轴线904旋转转盘支撑板906、基板头系统100a、100b、100c和100d以及附接到其上的基板40。
26.每个基板头系统100a、100b、100c或100d包括基板头110,该基板头围绕其自身的轴线由通过轴与其连接的头旋转马达1002旋转。头110可在其专用头旋转马达1002的驱动下独立地旋转(在图2中通过移除一个转盘四分之一覆盖物908示出),并且可进一步独立地径向振荡,即线性振荡,或围绕形成在转盘支撑板906中的狭槽910的中心点进行轨道运动,同时旋转。在此,狭槽910是圆形开口,其允许抛光头在轨道路径中移动,例如周转路径或其他路径,并因此使压靠在抛光垫上的基板以相同路径移动,或替代地在抛光垫54的线性、径向方向上移动。在基板头系统100内执行对附接到基板头110的底部的基板的升高或降低。整个转盘系统的一个优点是基板头110需要非常小的竖直行程来接收基板并将它们定位以进行抛光和清洗。只需很小的竖直行程可被容纳在基板头110最末端处的最下构件内。输入控制信号引起包括基板接收凹槽的基板头下构件与竖直静止基板头上构件之间的根据输入控制信号(例如,气动、液压或电信号)的相对运动(头的伸展和回缩)。
27.在基板的实际抛光期间,基板头系统(例如,100a、100b和100c)中的三者的基板头110定位在相应抛光站50a、50b和50c处和上方,每个抛光站50a、50b50c和50c具有一个或多个可独立旋转的压板52,每个压板52支撑表面被润湿(例如,在抛光站用于材料去除的情况下用磨料浆料润湿或用不需要在其中包括颗粒磨料的磨光组合物润湿)的抛光垫54,该抛光垫充当用于抛光基板40的介质。在抛光期间,基板头系统100a、100b和100c沿转盘90的相应半径独立地振荡,使得相关联基板头110沿相应抛光垫54的直径移动。在典型工艺中,基板头110的线性扫描轴线与抛光垫54的中心对准。另外地,在此,抛光头可在抛光站50处在旋转压板52之上振荡。
28.在使用中,基板头110,例如第四基板头系统100d的基板头,初始定位在基板传送站70上方。当转盘90旋转时,它将不同基板头系统100a、100b、100c和100d定位在抛光站50a、50b和50c之上以及传送站70之上。转盘90允许每个基板头系统1100首先顺序地位于传送站70之上,然后位于抛光站50中的一者或多者之上,并且然后回到传送站70。
29.每个抛光垫54可由垫调节器60中的一者连续地或周期性地调节,每个垫调节器装置具有附接到调节器臂62的独立旋转的调节器头64。磨料调节板或类似的调节表面需要包括在调节头64的底部处。臂62以通常在抛光垫54的中心与其周边之间的振荡运动将调节器头64扫过相关联抛光垫54。调节器头64被压靠在垫54上以磨蚀和调节垫,使得它随后在其旋转时有效地抛光压靠在垫54上的任何基板40。
30.在此,至少抛光站50b包括多个可旋转压板52a、52b和52c,每个压板具有设置在其上的抛光介质,诸如抛光垫54。抛光垫54是具有耐用粗糙表面的抛光垫,典型地由微孔聚氨酯或混合有填料的聚氨酯组成。抛光垫54可被压印或印上图案以改善浆料9在基板40的表面上的分布。抛光垫54可包括硬抛光材料、软抛光材料或它们的组合,以及其他材料性质。
31.硬抛光材料在本文中广泛地描述为抛光表面的硬度在针对聚合物材料的肖氏d硬度标度(如由总部位于宾夕法尼亚州费城的美国材料试验协会(astm)描述和测量的)上约50或更大的抛光材料。合适的硬抛光材料是包括可从亚利桑那州凤凰城rodel公司(rodel inc.,of phoenix,ariz.)获得的ic-1000、ic-1010和ic-1400抛光垫(ic-1000是rode公司的产品名)的材料。
32.抛光垫54还可包括一层或多层的复合垫,其中表面层的硬度在肖氏硬度d标度上为约50或更大。复合垫的总硬度在肖氏d硬度标度上可小于约50。虽然本文的描述描述了来自rodel公司的ic系列的垫的使用,但本发明同样适用于具有本文描述的硬度的所有抛光垫。
33.硬抛光材料在本文中广泛地描述为抛光表面的硬度在针对聚合物材料的肖氏d硬度标度(如由总部位于宾夕法尼亚州费城的美国材料试验协会(astm)描述和测量的)上小于约50的抛光材料。软抛光垫可由起毛的多孔合成材料构成,诸如包括聚合材料的均匀可压缩材料,即,塑料和/或泡沫、毡、橡胶或它们的组合。软抛光材料的一个示例是浸渍毡的聚氨酯。软抛光垫的一个示例是politex或suba系列的抛光垫,即subaiv,可从rodel公司获得(politex和suba是rodel公司的商品名)
34.替代地,抛光垫54可以是标准的两层垫,其中上层具有耐用的粗糙表面并且比下层更硬。例如,两层垫的上层可由微孔聚氨酯或混合有填料的聚氨酯组成,而下层可由用聚氨酯浸出的压缩毡纤维组成。上层和下层两者可以是约五十密耳厚。可从rodel公司获得两层标准垫,上层由ic-1000组成,而下层由suba-4组成(ic-1000和suba-4是rodel公司的产品名)。
35.在该装置的一个实施例中,抛光站50b包括第一压板52a、第二压板52b和第三压板52c,并且分别具有设置在其上的第一抛光垫54a、第二抛光垫54b和第三抛光垫54c。抛光垫54a-c中的每一者可适用于独特功能。例如,第一抛光垫54a可具有某些性质,例如去除设置在基板40的场上的体含铜材料所需的刚度或硬度。第二抛光垫54b可具有用于抛光基板40的第二硬度或刚度,并且压板52b和相关联垫54b适于抛光该基板,以去除设置在基板40上的残余含铜材料以及阻挡层材料。第三抛光垫是相对较软的抛光垫,可用于阻挡层去除工艺,诸如在两步铜去除工艺之后去除基板40上的含钽材料(例如钽和氮化钽)并磨光介电层。可用作压板52c上的第三抛光垫54c。另外地,例如,抛光垫54a和54b可具有相同的材料性质,例如以去除诸如铜之类的残余金属和下面的阻挡层材料,并且提供具有不同的材料性质的第三抛光垫54c以去除残余阻挡层材料并磨光介电层。在此,在第二抛光站50b处部署至少两个不同压板52,其中的第一压板52a上的第一垫具有与其中的第二压板52b上的第二垫54b的材料性质不同的材料性质。另外地,可将不同浆料施加到抛光垫54a-c中的不同垫。例如,在抛光站50b用于清除上覆的金属并去除下面的阻挡层的情况下,其中上覆的金属先前被抛光以露出下面的阻挡层的至少一部分,可在其中一个抛光垫上采用对将阻挡层转化为更容易去除的材料有选择性的浆料,例如在抛光站具有三个垫的情况下,第二垫54b以及不同的化学组合物((诸如去离子水和润湿组合物)被施加到其中进行磨光的第三垫。在第一垫54a的主要目的是去除铜的情况下,对铜有选择性的浆料被分配到该垫54a。另外地,在使用三个垫的情况下,两个垫可具有相同组合物,而第三个可具有不同组合物。在此,可将相同或不同浆料组合物施加到多垫站50b中的两个垫54a、54b,并且可将可包括或可不包括磨料的不同化学品施加到具有不同组合物的第三垫54c。
36.压板52中的每一者可以是连接到压板驱动马达(未示出)的可旋转铝或不锈钢压板。抛光站50a-c中的每一者可包括垫调节器装置60,而抛光站50b包括用于其每个压板的垫调节装置。垫调节器装置60具有保持独立旋转的调节器头64和相关联清洗盆(未示出)的臂62。垫调节器装置60a-c维持抛光垫的状态,使得其有效地抛光基板40。如图3所示,抛光
站50b的抛光压板52a-c中的每一者可由不同调节器装置60服务,该调节器装置被配置为调节在该压板52a-c上使用的垫的类型,如在图3中所示的那样。
37.在本文图3中,与图2相比,每个压板52/垫54具有其专用的被配置为调节垫54a、54b和54c中的对应一者的调节器(在此为调节器60a、60b和60c),以及专用冲洗臂11a、11b和11c,如本文进一步讨论。抛光站50a-c各自具有与其相关联的专用组合物递送/冲洗臂11,该递送/冲洗臂包括两个或更多个供应管以将一种或多种cmp组合物、清洁组合物和/或水提供到抛光介质的表面。图3示出了用于站50b的递送臂的布置。组合物递送/冲洗臂11将一种或多种液体组合物递送到旋转垫54的中心,其量足以覆盖和润湿整个抛光介质。每个组合物递送/冲洗臂11还包括若干喷嘴(未示出),这些喷嘴可在每个抛光和调节循环结束时向抛光制品上提供高压流体冲洗。在抛光站50b中,三个不同组合物递送/冲洗臂11与其相关联,臂11a与压板52a相关联,臂11b与压板52b相关联,并且臂11c与压板52c相关联。不同化学或冲洗组合物,包括除了其流体化学品之外还携带磨粒的浆料,可通过臂11a-c递送,这些臂被选择用于这些组合物被分配到的相应垫54a-c的组合物和要使用该垫54a-c对基板40执行的工艺,如本文先前所讨论。
38.抛光头100执行若干机械功能。通常,抛光头100将基板40保持抵靠在抛光垫54上,以在基板1的背表面上分布向下压力,在基板40与抛光垫54接触时旋转该基板,并确保基板40在其抛光期间或在抛光站50a-c与装载/卸载站70之间不会从抛光头100下方滑出。
39.图1b示出了图1a的替代实施例的简化平面图。在该实施例中,系统10通常包括抛光器102、传送机器人104和工厂接口108。cmp后处理模块168典型地设置在工厂接口108内。cmp后处理模块168通常包括退火站172和沉积站174。退火站172和沉积站174可彼此相邻、以空间分开关系或在系统10内的不同区域中定位。cmp后处理模块168可另外包括清洁器106。可适于受益于本发明的抛光系统的一个示例包括可从加利福尼亚州圣克拉拉市应用材料公司(applied materials,inc.of santa clara,calif)获得的mirra mesa
tm cmp系统。mirra mesa
tm cmp系统的描述公开于ettinger等人的2000年5月11日提交的共同转让的美国专利申请序列号09/547,189、现为美国专利号6,361,422中,该文献全文以引用方式并入本文。虽然cmp后处理模块168被示出为布置在工厂接口108中作为参考图1a描述的化学机械抛光系统100中的整体部件,但本发明也可用于抛光基板并在其上沉积含金属层的其他抛光系统(包括在抛光之前和/或之后对含金属层进行退火的系统)中。
40.在一个实施例中,工厂接口108包括多个基板盒42、至少一个或多个接口机器人158、输入模块144和cmp后处理模块168。工厂接口机器人158通常提供在盒42和系统10的其他模块(即,输入模块144和cmp后处理模块168)之间传送基板所需的运动范围。可用作工厂接口机器人158的机器人的示例是由加利福尼亚州里士满市肯辛顿实验室(kensington laboratories,inc.,of richmond,calif.)制造的4-link机器人和由马萨诸塞州比勒利卡市pri自动化公司(pri automation,of billerica,mass.)制造的模型equipe 407b。
41.未处理的基板通常由接口机器人158从盒42传送到输入模块144。输入模块144通常有助于接口机器人158与传送机器人104之间的基板传送。传送机器人104在输入模块144与抛光器102之间传送基板。经处理基板通常以相反方式返回到设置在工厂接口108中的盒42。
42.传送机器人104可以是用于在cmp环境中传送基板的任何数量的机器人。通常,传
送机器人104与工厂接口机器人108基本上类似。
43.抛光器102通常包括基部170、传送站118、一个或多个抛光头176、cmp机器人114和一个或多个抛光站112。传送站118设置在基部170上并且通常包括机器人接口116、传送站机器人178和装载杯180。机器人接口116被配置为从传送机器人104接受基板。传送站机器人178在机器人接口116与装载杯180之间传送基板。装载杯180通常将基板传送到抛光头176,抛光头在抛光期间保持基板。可适于受益于本发明的一种装载杯180描述于tobin的1999年10月8日提交的美国专利申请序列号09/414,907、现为美国专利号6,716,086中,该文献全文以引用方式并入本文。可适于受益于本发明的一种传送站118描述于tobin的2000年12月5日授予的美国专利号6,156,124中,该文献全文以引用方式并入本文。
44.cmp机器人114通常耦接到基部170并分别将抛光头176支撑在从传送站机器人178延伸的多个臂182上。cmp机器人114可被转位,使得每个抛光头176可定位在装载杯180上方以促进基板与其一起传送,并且定位在抛光站112中的一者之上以促进基板抛光。
45.在抛光站112与传送站118之间的传送期间和在处理期间,抛光头176通常保持基板。抛光头176轴向移动以在处理期间将基板压靠在设置在抛光站112中的抛光材料184上。抛光基板通常通过在抛光流体的存在下以相对于抛光材料184的抛光运动在保持基板在抛光头176中的同时移动基板来完成。
46.抛光站112通常包括支撑抛光材料184的压板186。在一个实施例中,压板186和设置在其上的抛光材料184旋转以提供抛光运动。可理解,可替代地利用提供相对抛光运动的任何抛光器(包括本文未明确描述的那些)。例如,抛光材料184可在抛光头176下方以线性、x/y或轨道运动移动。抛光头176可相对于可移动的或静止的抛光材料184旋转、线性移动、轨道运动或以其他运动移动。可适于受益于本发明的一些示例性抛光器描述于1998年8月14日授予tolles等人的美国专利号5,738,573、sommer的2000年2月29日提交的美国临时专利申请号60/185,812以及birang等人的1999年2月4日提交的美国专利申请序列号09/244,456、现为美国专利号6,244,935中,所有这些文献全文以引用方式并入本文。应当注意,可修改由其他设备制造商提供的其他抛光器以结合有本发明的方面。
47.抛光材料184可以是常规或固定磨料材料。常规抛光材料184通常由泡沫聚合物构成并且作为垫设置在压板186上。在一个实施例中,常规抛光材料184是泡沫聚氨酯。这种常规抛光材料184可从特拉华州纽瓦克市的rodel公司获得。
48.固定磨料抛光材料184通常由悬浮在设置在背板上的离散元件中的树脂粘结剂中的多个磨粒组成。固定磨料抛光材料184可以垫或网形式使用。由于磨粒包含在抛光材料184本身中,利用固定磨料抛光材料的系统通常使用不含磨料的抛光液。固定磨料抛光材料184的示例公开于1997年12月2日授予rutherford等人的美国专利号5,692,950和1995年9月26日授予haas等人的美国专利号5,453,312中,这些文献全文以引用方式并入本文。这种固定磨料材料还可从位于明尼苏达州圣保罗市明尼苏达制造和矿业公司(3m)(minnesota manufacturing and mining company(3m),saint paul,minn)获得。
49.在一个实施例中,cmp后处理模块168被描述为结合驻留在工厂接口内的清洁器106。然而,cmp后处理模块168(或退火站172)可替代地“独立”在系统10外部或可与在抛光器102上或工厂接口108中的其他模块(即,清洁模块、沉积站等)结合设置在抛光器102附近。
50.清洁器106通常去除抛光残余物,诸如抛光液(即,浆料)、磨蚀的材料(来自基板和/或抛光材料184)和来自抛光的基板的其他污染物。在一个实施例中,清洁器106通常包括步进梁148,该步进梁将经处理基板运输通过其中集成有沉积站174的清洁器106的清洁器106中。包括连接到水平杆(未示出)的一系列基板夹持器(未示出)的步进梁148运输抛光的基板通过清洁器106中的清洁和/或沉积浴。在基板移动通过步进梁148上的清洁器106时,基板被清洗和擦洗。在清洁器106的至少一个部分中,基板被喷射或浸入电镀介导流体(诸如电镀流体)中以在基板上形成含金属层。随着在抛光或沉积期间可能已经积聚在基板上的浆料和其他污染物被去除,基板朝向端部154移动通过清洁器106。在清洁序列的结束,清洁的基板由工厂接口机器人158从步进梁148取出并放置在退火站172中。在退火之后,基板由接口机器人158从退火站172取回并返回到晶片存储盒42中的一者。可适于受益于本发明的一种清洁器描述于brown等人的2000年4月26日提交的美国专利序列号09/558,815、现为美国专利号.6,575,177中,该文献全文以引用方式并入本文。
51.图4a-c是抛光垫54a-c的俯视图(平面图),每个抛光垫被支撑在其专用的单独压板52上。在此的压板52围绕中心轴线彼此相邻定位。鉴于这里采用了三个压板,它们围绕三个压板的中心点以彼此120
°
的分开度数间隔开。每个压板52围绕其垫接收表面的中心关于其自身的中心轴线旋转。在图4a所示的第一实施例中,单独压板52以及因此在其上的垫54a-c正在旋转,并且抛光头以直线路径在其之上扫过。计算基板头抵靠抛光垫54a-c中的每一者而线性扫过期间抛光头100在垫54a-c中的每一者上的停留时间,以确保基板的所有抛光的表面花费相同的时间量(在本文中是相等的停留时间)与垫54的与该基板的所有其他抛光的表面与该垫接触的相同的周向位置接触。然而,基板的抛光的表面与垫中的不同垫接触的时间量可不同或相同。在此,基板可被定位并与抛光垫中的仅一个垫或同时地与抛光垫54a-c中的任何两个垫或同时地与抛光垫5a-c中的三个垫进行相对运动。基板头110在线性轴线上移动基板40以将正被抛光的基板的表面定位到压板52的外周边的相反极端。同时,抛光头使基板绕其抛光的表面的中心处的点旋转。
52.在图4b所示的另一个实施例中,将基板40定位在多个抛光垫54(这里是三个抛光垫54a-c)的表面上的基板头110的线性扫描轴线偏离三个抛光垫54a的中心对准。基板头110将基板40在线性轴线上移动到压板52的外周边的相反极端。同时,抛光头使基板关于其自身的中心轴线旋转。
53.在图4c所示的另一个实施例中,将基板40定位在多个抛光垫54a-c(这里是三个抛光垫54a-c)的表面上的基板头110的扫描路径是轨道的。换句话说,当基板本身围绕其抛光的表面的中心旋转时,基板的抛光的表面的中心在不同抛光垫54a上遵循圆形、椭圆形或多边形路径。
54.在图4a到4c的每一者中,在抛光垫中的每一者具有不同性质的情况下,可对基板的抛光的表面执行不同的效果。例如,如果一个垫54a被配置用于大量去除金属,一个垫54b用于较不激进的材料去除,而第三个垫54c用于相同材料的更不激进的材料去除,则当基板在压力下抵靠第一垫54a移动时,可产生相当粗糙的表面。当抵靠第二垫54b抛光时,粗糙度可降低,并且当抵靠第三垫抛光时,可产生相当光滑的材料表面。这里,设想基板将在三个垫之间并抵靠三个垫连续移动以抛光去除在其上的表面材料。
55.另一方面,具有不同垫54a-c材料的不同压板52可不同地使用,包括改变基板的抛
光的表面在抛光的表面上的停留时间。例如,垫54a可被配置用于体材料去除,垫54b用于去除下面的阻挡层材料,并且垫54c可被配置用于抛光和去除残余阻挡层材料。当基板在垫54a上被抛光时,覆盖场的体材料可在基板的周向区域中被去除。这些区域可在垫54b上被优先地抛光,以去除暴露的阻挡层材料,同时继续从抛光的表面的其他区域去除体层,特别是在体材料朝向基板的外圆周以比径向向内更快的速率被去除。在此,基板的外周部分可在压板52b上被抛光以去除阻挡层,同时其径向向内的部分被抛光以去除在其上的剩余体层。然后,可移动基板以磨光抛光的表面的外圆周,同时抛光的表面的内圆周部分抵靠针对阻挡层材料的垫54b被偏置。另外地,基于被抛光的材料,使用不同浆料。基板抛光表面接触不同垫54a-c的这种范例的组合可与基板的线性振荡和轨道运动结合以获得期望的抛光结果。
56.抛光站50b的配置也可以是独立的抛光器,其中基板仅在三个垫54a-c上被抛光。替代地,当在图1和图2的系统中使用时,抛光站50a将通常执行体覆层去除,例如去除在其上的大部分的金属层,使得如果下面的层(例如,阻挡层)暴露,则部分被去除。使用关于相对于垫54a-c放置基板的上述操作方法,可将基板传送到处理站5ob并在三个不同垫之间移动以去除剩余的体材料以及至少任何下面层材料的大部分,然后传送到第三处理站50c进行磨光,接着从系统取出以进行清洁。
57.图5是示出在上述平面化工艺和阻挡层去除中去除含铜材料的工艺的一个实施例的流程图。在第一动作、即动作190中,使用机器人35和附接到其上的机器人叶片将基板40从装载装置30移动到传送站70中。然后在传送站70处将基板吸紧到抛光头100中,并且其中保持基板40的抛光头顺序地将基板移动到抛光站50a、50b和50c,以按该次序在每个站处进行抛光或磨光操作。在动作195处,在抛光头已经在抛光站50a处对基板进行抛光之后,抛光头提升其中的抛光垫的基板,并且将基板40移动到抛光站50b。在此,提供了图3的多压板配置。在动作200处,抛光头100以任何期望的顺序和驻留时间范例将基板定位成与多压板抛光站的抛光垫54a-c接触。在基板40与垫54-c之间的压力可由用户调谐或由自动化工艺选择。在动作210处,以第一流率将第一抛光组合物供应到抛光垫54a。在动作220处,以第二流率将第二抛光组合物供应到抛光垫54b。在动作230处,以第三流率将第三抛光组合物供应到抛光垫54c。抛光垫54a-c中的每一者可具有不同的粗糙度、厚度和粘度,并且供应到每个抛光垫的化学组合物可不同。
58.在该工艺序列中,然后在动作240处通过在处理站50b中抵靠抛光垫54a-c抛光基板40来从基板的表面去除体含铜材料的至少一部分。在动作240处的抛光工艺中,抛光头110在用户选择的时间内以用户选择的顺序将基板定位成与抛光垫54a-c接触,并且基板和抛光垫与分布在两者间的液体抛光组合物一起旋转以对基板进行化学和机械抛光活动。阻挡层(如果存在的话)也在抛光站50b中被基本上去除。然后在动作250处,由抛光头100将基板40移动到抛光站50c并在动作255处抵靠在其中的抛光垫54进行磨光。在抛光工艺的终点,典型地在动作257处使基板40与抛光垫54脱离接触并将基板40传送到清洁器(未示出)。在基板40的传送期间,基板由定位在各个站之间的冲洗头80冲洗。在清洁器处,释放清洁组合物以浸洗基板,从而在动作260处,从基板40清除在抛光动作期间积累的所有碎屑。然后在动作265处冲洗和干燥基板,由此干燥基板40。为了完成抛光循环,在动作270处,将基板40返回到传送站70以从抛光系统10取出。
59.对于设置在可旋转压板5上的抛光垫,设置在基板上的抛光垫54以在约50rpm与约150rpm之间的速率旋转。设置在抛光头110中的基板以例如在约50rpm与约150rpm之间的旋转速度旋转。旋转速度可以是由用户选择的可变旋钮或自动化的。典型地,载体头和压板两者的在约80rpm与100rpm之间的旋转速度(例如,分别为93rpm和87rpm)已经用于从基板表面去除体材料。抛光制品和基板通常在相同方向上旋转,但是它们可在相反方向上旋转。在载体头和压板旋转速度下,基板在基板的中心以约600mm/秒与约1900mm/秒之间的扫描速度或相对线速度被抛光。扫描速度可以是用户选择的可变旋钮或自动化的。
60.第一抛光动作典型地提供在约600mm/秒与约1900mm/秒之间的第一相对线速度,这造成有效地去除体导电材料,并且第二抛光步骤典型地提供在约100mm/秒与约550mm/秒之间的第二相对线速度以有效地去除任何残余导电材料。
61.基板的相对线速度通常被认为是在基板的中心处的线速度。对于旋转基板,当从基板的中心进一步测量时,平均相对线速度典型地增大。另外地,随着基板从旋转抛光介质的中心移动,基板的相对线速度增大。在本文描述的旋转速度和旋转速度比下的相对线速度的示例可在从旋转抛光制品轴线位移约12.5cm至13cm的基板的中心处产生约100mm/秒与约550mm/秒的线速度。
62.可通过在第一步骤中以约200ml/分钟或更大的流率递送抛光组合物并在第二抛光步骤期间以在约10ml/分钟与约50ml/分钟之间的流率递送抛光组合物来增强抛光。
63.体导电材料在本文中广义地定义为沉积在基板上的导电材料,其量足以填充形成在基板表面上的特征并覆盖基板的表面区域的约25%或更多。体材料通常沉积到足够的厚度以覆盖在介电层上方的整个基板表面。体导电材料可包括含铜材料,例如铜、铜合金和/或掺杂铜。
64.残余或剩余导电材料被广义地定义为覆盖基板的表面区域的约25%或更少的任何导电材料。在使用含磨料或不含磨料的抛光组合物和常规抛光垫从基板表面去除体材料的一个或多个抛光工艺步骤之后,残余材料的存在量通常覆盖基板的表面区域的约5%至约10%。残余导电材料可包括含铜材料,例如铜、铜合金、氧化铜和/或掺杂铜。
65.可通过本文描述的工艺抛光的在其上形成有体导电材料的基板表面通常通过使介电层中形成特征定义、通常在介电层上和特征定义中沉积阻挡层以及沉积导电材料(诸如含铜材料,其量足以填充在其中形成的特征定义)来形成。
66.如贯穿本公开所使用,短语“含铜材料”、“铜”和符号cu旨在涵盖高纯度元素铜以及掺杂铜和铜基合金,例如含有至少约80重量%铜的掺杂铜和铜基合金。阻挡层材料包括钽、氮化钽及其衍生物,诸如氮化钽硅。本文描述的本发明还设想使用已知或未知的其他阻挡层材料,这些阻挡层材料可用作具有在形成半导体特征的情况下可使用的已知或未知的导电材料(诸如铜)的阻挡层。
67.介电层可包括可用于制造半导体器件的已知或未知的各种介电材料中的任一种。例如,可采用介电材料,诸如二氧化硅、掺磷硅玻璃(psg)、掺硼磷硅玻璃(bpsg)和掺碳二氧化硅。介电层还可包括低介电常数材料,包括氟硅玻璃(fsg)、聚合物(诸如聚酰亚胺)和含碳氧化硅(诸如可从加利福尼亚州圣克拉拉市应用材料公司(applied materials,inc.of santa clara,calif)获得的black diamond
tm
)。开口通过常规光刻和蚀刻技术形成在层间电介质中。本发明还设想使用可用作半导体制造中的介电层的已知或未知的介电材料。
68.虽然本文描述的工艺示出在三个压板上抛光基板,但是本发明设想通过本文描述的工艺在具有两个、四个或多个压板的装置上抛光基板。另外地,虽然以下处理参数一般被描述用于抛光200mm基板,但是本发明设想修改处理参数以满足抛光不同大小的基板(诸如300mm基板)和在各种装置(例如,轨道运动抛光装置)上抛光的要求。以下描述的过程应当被认为是说明性的,而不应当被解释或理解为限制本发明的范围。
69.元件符号列表
70.1 基板
71.5 可旋转压板
72.9 浆料
73.10 系统
74.10 抛光系统
75.11 组合物递送/冲洗臂
76.11 组合物递送/冲洗臂
77.11 不同的组合物递送/冲洗臂
78.20 抛光装置
79.20 基板抛光装置
80.20 装置
81.22 基部
82.22 机器基部
83.23 台面
84.24 可移除上外覆盖物
85.25 围栏
86.30 装载装置
87.30 基板装载装置
88.34 桶
89.35 机器人
90.3m 矿业公司
91.40 基板
92.40 基板
93.40 接收单独基板
94.42 盒
95.42 盒
96.42 晶片存储盒
97.42 基板盒
98.42 原始盒
99.50 抛光站
100.50 抛光站
101.52 单独压板
102.52 压板
103.52 单独压板
104.52 两个不同压板
105.52 压板
106.52 不同压板
107.52 可独立旋转的压板
108.52 一个可旋转压板
109.54 抛光垫
110.54 抛光垫
111.54 垫
112.54 相应抛光垫
113.54 相应抛光垫
114.60 不同调节器装置
115.60 垫调节器装置
116.60 垫调节器装置
117.62 臂
118.62 调节器臂
119.62 可旋转臂
120.64 调节器头
121.68 盆
122.70 站
123.70 传送站
124.70 基板传送站
125.80 冲洗头
126.90 转盘
127.90 可旋转多头转盘
128.100 抛光头
129.100 基板头系统
130.100 抛光头
131.100 第四基板头系统
132.100 化学机械抛光系统
133.102 抛光器
134.104 传送机器人
135.106 清洁器
136.108 工厂接口机器人
137.108 工厂接口
138.110 基板头
139.110 抛光头
140.110 基板头
141.110 头
142.112 抛光站
143.112 抛光站
144.114 cmp机器人
145.116 机器人接口
146.118 传送站
147.11a 臂
148.11a 冲洗臂
149.11b 臂
150.11b 冲洗臂
151.11c 臂
152.144 输入模块
153.148 梁
154.158 接口机器人
155.158 工厂接口机器人
156.158 一个或多个接口机器人
157.168 cmp后处理模块
158.170 基部
159.172 站
160.174 沉积站
161.176 抛光头
162.176 抛光头
163.178 传送站机器人
164.180 装载杯
165.182 臂
166.184 常规抛光材料
167.184 抛光材料
168.184 此类常规抛光材料
169.184 固定磨料抛光材料
170.186 压板
171.195 动作
172.200 动作
173.210 动作
174.220 动作
175.230 动作
176.240 动作
177.250 动作
178.255 动作
179.257 动作
180.260 动作
181.265动作
182.270动作
183.50a抛光站
184.50a抛光站
185.50b站
186.50b第二抛光站
187.50b处理站
188.50b抛光站
189.50b多垫站
190.50b抛光站
191.50c第三处理站
192.50c抛光站
193.52a压板
194.52a压板
195.52a可旋转压板
196.52a第一压板
197.52b压板
198.52b第二压板
199.52b可旋转压板
200.52b压板
201.52c压板
202.54a抛光垫
203.54a垫
204.54a第一垫
205.54a第一抛光垫
206.54a抛光垫
207.54a垫
208.54b抛光垫
209.54b垫
210.54b第二垫
211.54b第二抛光垫
212.54b垫
213.54c抛光垫
214.54c第三抛光垫
215.54c垫
216.54c第三垫
217.5ob处理站
218.60a调节器
219.60b调节器
220.902中心柱
221.902静止中心柱
222.904转盘轴线
223.906转盘支撑板
224.908一个转盘四分之一覆盖物
225.910狭槽
226.1002专用头旋转马达
227.1002头旋转马达
228.1100基板头系统
229.1600套件
230.407b模型equipe
231.11a-c臂
232.50a-c抛光站
233.52a-c压板
234.52a-c第一第二压板
235.52a-c压板
236.52a-c第一第三压板
237.54-c垫
238.54a-c垫
239.54a-c不同垫
240.54a-c不同垫
241.54a-c第三抛光垫
242.54a-c垫
243.54a-c抛光垫
244.54a-c相应垫
245.5a-c抛光垫
246.60a-c垫调节器装置
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1