一种智能化金属高效切割设备的制作方法
1.本发明涉及金属切割设备技术领域,具体为一种智能化金属高效切割设备。
背景技术:
2.在金属铸造过程中,由于工艺的需要,铸造件的本体除包含工件本身的形状和规格外,还有一些"多余"的结构部分,这部分就通常被称为浇冒口,浇冒口是金属在铸造工艺中所必然产生"多余"部分,在完成金属铸造成型工艺后,浇冒口就是首先要清除的部分,在铸造生产中,铸件浇冒口的清除是一种劳动量大,自动化程度还很低的工序,常见的浇冒口去除方法为物理切割方式,包括火焰、等离子、激光等的热切割方式,以及带锯、圆盘锯、铣刀等的冷切割方式,其中,后者作为常见的操作简单、成本低廉的应用方式,被广泛应用到实际生产过程中,目前常见的手工或半自动化的锯切切割方式为圆锯片切割及带锯切割。
3.现有的切割机在对金属铸件的浇冒口进行切割时,需要工人手动将铸件放置在切割机的切割平台,并根据切割轮的位置调整铸件,然后再将铸件进行夹紧,对于一些工作经验少的操作员,金属铸件安装对齐速度慢,而且对齐时容易出现误差,导致切割轮对铸件进行切割后,铸件表面依然存在部分多余金属,增加后期打磨的工作量,并且铸件在浇筑后进行冷却时,由于铸件的两端的金属液在凝固过程中产生收缩,从而导致铸件的两端产生不规则的凹陷,当操作员对铸件进行压紧固定时,铸件的两个端面与切割机的夹持平台的接触受力点不是中心位置,导致夹持平台将铸件旋转后,需要操作者移动夹持平台将铸件与切割轮对齐,操作不便。为此,我们提出一种智能化金属高效切割设备。
技术实现要素:
4.本发明的目的在于提供一种智能化金属高效切割设备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种智能化金属高效切割设备,包括切割机本体以及切割平台,切割平台位于切割机本体上方;校正机构,校正机构位于切割平台上方;夹持机构,夹持机构位于切割平台内壁,校正机构将待切割的铸件的身位进行校正,夹持机构对校正后的铸件进行夹持固定。
6.优选的,校正机构包括设置在切割平台上方的移动盒,移动盒两侧分别设有滑块,切割平台内壁设有能够与滑块滑动连接的滑槽,移动盒内壁设有移动块,移动块外侧设有能够对铸件进行夹持的夹持件,移动块下方设有电动伸缩杆一,移动盒开口一端设有能够对移动盒进行密封的封闭件。
7.优选的,夹持件包括分别设置在移动块两侧内壁的移动杆,移动杆一端设有复位弹簧一,复位弹簧一一端与移动块内壁连接,移动杆靠近复位弹簧一一端设有限位块一,移动块内壁设有能够与限位块一滑动连接的限位槽一,移动杆远离复位弹簧一一端设有夹持臂一。
8.优选的,封闭件包括设置在移动盒开口处的两端的挡板,移动盒内壁设有能够与
挡板滑动连接的封闭槽,挡板一侧设有电动伸缩杆二,电动伸缩杆二一端与移动盒内壁连接。
9.优选的,夹持机构包括设置在切割平台内壁两侧的夹持臂二,夹持臂二两侧分别设有限位块二,切割平台内壁设有能够与限位块二滑动连接的限位槽二,夹持臂二一侧设有复位弹簧二,复位弹簧二一端与切割平台内壁连接,切割平台一端设有能够对铸件尾端进行夹持的固定件。
10.优选的,固定件包括设置在切割平台一端的转动台,转动台内壁设有多个夹持臂三,夹持臂三外侧设有限位块三,转动台内壁设有能够与限位块三滑动连接的限位槽三,夹持臂三一端设有复位弹簧三,复位弹簧三一端与转动台内壁连接。
11.优选的,夹持臂一内侧设有防护垫。
12.优选的,夹持臂二下端设有弧形端一。
13.优选的,夹持臂三外端设有弧形端二。
14.优选的,封闭件包括设置在移动盒开口处两端的挡板,移动盒内壁设有能够与挡板滑动连接的封闭槽,挡板一侧设有压缩弹簧一,压缩弹簧一一端与移动盒内壁连接,挡板上方内壁设有卡块,卡块下方设有压缩弹簧二,移动盒内壁设有能够与卡块卡接的卡槽
15.与现有技术相比,本发明的有益效果是:
16.本发明在使用时,操作者将待切割的铸件放置在移动块上方,通过移动块两侧的夹持臂一对铸件的两侧同时进行夹持,在两个夹持臂一的作用下使得铸件水平放置,进而使得铸件的待切割位置与切割机本体的切割轮相互垂直,对操作员的操作要求降低,减少人工对齐出现的误差,并且通过夹持臂二与夹持臂三对铸件两端外侧的夹持固定,使得操作员控制铸件转动时,铸件的转动轴线不变,不需操作员重新校正下切位置,减少工作人员工作量。
附图说明
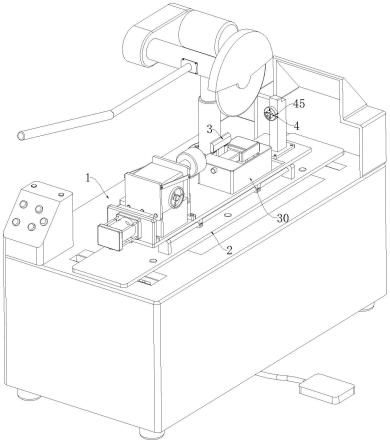
17.图1为本发明整体结构示意图;
18.图2为本发明结构校正机构侧视示意图;
19.图3为本发明结构移动盒侧视剖视示意图;
20.图4为本发明结构滑槽俯视剖视示意图;
21.图5为本发明结构移动块主视剖视示意图;
22.图6为本发明结构复位弹簧二主视剖视示意图;
23.图7为本发明结构限位块二侧视剖视示意图;
24.图8为本发明结构固定件主视示意图;
25.图9为本发明结构固定件主视剖视示意图;
26.图10为本发明结构示卡槽侧视剖视意图;
27.图11为本发明结构示挡板侧视剖视意图。
28.图中:1-切割机本体;2-切割平台;3-校正机构;30-移动盒;31-滑块;32-滑槽;33-移动块;34-夹持件;35-电动伸缩杆一;36-封闭件;37-移动杆;38-复位弹簧一;39-限位块一;310-限位槽一;311-夹持臂一;312-挡板;313-封闭槽;314-电动伸缩杆二;315-压缩弹簧一;316-卡块;317-压缩弹簧二;318-卡槽;319-斜型端;4-夹持机构;40-夹持臂二;41-限
位块二;42-限位槽二;43-复位弹簧二;44-固定件;45-转动台;46-夹持臂三;47-限位块三;48-限位槽三;49-复位弹簧三;410-弧形端一;411-弧形端二;5-防护垫。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例一
31.请参阅图1-9,本发明提供一种技术方案:一种智能化金属高效切割设备,包括切割机本体1以及切割平台2,切割平台2位于切割机本体1上方;校正机构3,校正机构3位于切割平台2上方;夹持机构4,夹持机构4位于切割平台2内壁,校正机构3将待切割的铸件的身位进行校正,夹持机构4对校正后的铸件进行夹持固定,在对铸件进行切割时,操作者将铸件放置在校正机构3上方,通过校正机构3对铸件的两侧进行夹持以配合将铸件摆正至水平位置,使得铸件的切割平面与切割机本体1的切割轮垂直,校正机构3将铸件固定后,切割平台2推动夹持机构4一部分移动至铸件上方,校正机构3推动铸件一端插入夹持机构4内侧,切割平台2继续移动,从而推动铸件的另一端也插入夹持机构4内壁以配合对铸件两端进行固定,通过对铸件两端外侧的夹持固定,使得操作员控制铸件转动时,铸件的转动轴线不变,不需操作员重新校正下切位置,减少工作人员工作量,当铸件两端都夹持固定后,校正机构3下移并与铸件分离,从而完成铸件的安装定位,操作员通过切割机本体1对铸件进行切割加工。
32.校正机构3包括与切割平台2上方内壁滑动连接的移动盒30,移动盒30两侧分别固定连接有滑块31,切割平台2内壁开设有能够与滑块31滑动连接的滑槽32,移动块33与移动盒30内壁滑动连接,移动块33上方开设有弧形凹槽以配合与铸件底部进行贴合,移动块33外侧设有能够对铸件进行夹持的夹持件34,移动块33下方固定连接有电动伸缩杆一35,电动伸缩杆一35一端与移动盒30内壁固定连接,移动盒30开口一端设有能够对移动盒30进行密封的封闭件36,当校正机构3工作时,操作员将封闭件36打开,从而解除对移动盒30开口的封闭,电动伸缩杆一35推动移动块33滑出移动盒30内壁,操作员将铸件放置在移动块33的弧形凹槽上方,通过设置的夹持件34对铸件表面进行固定,当铸件固定完成后,电动伸缩杆一35再次伸长,使得铸件的一端插入夹持机构4内壁,夹持机构4推动铸件一端,铸件带动移动盒30移动,移动盒30带动滑块31沿着滑槽32内壁滑动,当铸件两端都与夹持机构4固定后,电动伸缩杆一35收缩带动夹持件34与铸件两侧分离,同时电动伸缩杆一35带动移动块33以及夹持件34滑入移动盒30内壁,通过封闭件36再次将移动盒30的开口封闭,从而避免切割机本体1在对铸件进行切割时,飞溅的火星损坏移动盒30内壁的物体。
33.夹持件34包括分别与移动块33两侧内壁滑动连接的移动杆37,移动杆37一端固定连接有复位弹簧一38,复位弹簧一38一端与移动块33内壁固定连接,移动杆37靠近复位弹簧一38一端固定连接有限位块一39,移动块33内壁开设有能够与限位块一39滑动连接的限位槽一310,移动杆37远离复位弹簧一38一端固定连接有夹持臂一311,夹持臂一311远离移动杆37端设置有开口向外的弧度以配合铸件插入夹持臂一311内壁,夹持臂一311内侧固定
连接有防护垫5以配合对铸件表面进行保护,夹持件34工作时,工作人员将铸件向下插入夹持臂一311内壁,使得铸件推动夹持臂一311向外移动,夹持臂一311带动移动杆37沿着移动块33内壁向外滑动,移动杆37带动限位块一39沿着限位槽一310内壁滑动,同时移动杆37拉伸复位弹簧一38,使得复位弹簧一38处于拉伸状态,故复位弹簧一38拉动移动杆37有向移动块33内壁移动的趋势,移动杆37带动夹持臂一311对铸件表面进行贴紧夹持。
34.封闭件36包括分别位于移动盒30开口处的两端的挡板312,移动盒30内壁开设有能够与挡板312滑动连接的封闭槽313,挡板312一侧固定连接有电动伸缩杆二314,电动伸缩杆二314一端与移动盒30内壁固定连接,当打开封闭件36时,工作人员控制电动伸缩杆二314收缩,电动伸缩杆二314拉动挡板312沿着封闭槽313内壁滑动,从而使得挡板312解除对移动盒30开口处的密封,使得电动伸缩杆一35推动移动块33滑出移动盒30内壁以配合对铸件进行夹持,当铸件与夹持机构4连接后,电动伸缩杆一35收缩控制夹持臂一311以及移动块33滑入移动盒30内壁,操作员控制电动伸缩杆二314伸长从而推动挡板312沿着封闭槽313内壁滑动,从而使得两个挡板312相互靠近以配合将移动盒30的开口处封闭,进而避免切割机本体1在对铸件进行切割时,飞溅的火星损坏移动盒30内壁的物体。
35.夹持机构4包括分别与切割平台2内壁两侧滑动连接的夹持臂二40,夹持臂二40下端开设有弧形端一410以配合铸件插入夹持臂二40内壁,夹持臂二40两侧分别固定连接有限位块二41,切割平台2内壁设有能够与限位块二41滑动连接的限位槽二42,夹持臂二40一侧固定连接有复位弹簧二43,复位弹簧二43一端与切割平台2内壁固定连接,切割平台2一端设有能够对铸件尾端进行夹持的固定件44,夹持机构4工作时,切割平台2带动夹持臂二40移动至铸件一端上方,通过电动伸缩杆一35推动移动块33向上移动,从而使得移动块33推动铸件一端向上移动,并使得铸件一端通过弧形端一410插入夹持臂二40内壁,铸件推动夹持臂二40沿着切割平台2内壁向外滑动,夹持臂二40带动限位块二41沿着限位槽二42内壁滑动,同时夹持臂二40拉伸复位弹簧二43,复位弹簧二43使得夹持臂二40产生向着切割平台2内侧移动的趋势,从而使得两个夹持臂二40相互配合将铸件一端进行固定,当夹持臂二40对铸件一端进行固定后,切割平台2带动铸件另一端向固定件44靠近,通过设置的固定件44将铸件的另一端进行固定以配合完成对铸件两端的固定。
36.固定件44包括与切割平台2一端转动连接的转动台45,转动台45内壁滑动连接有多个夹持臂三46,夹持臂三46可以设置有2个、3个、4个等多个,本实施例中夹持臂三46设置有四个,夹持臂三46外端开设有弧形端二411以方便铸件一端插入夹持臂三46内壁,夹持臂三46外侧固定连接有限位块三47,转动台45内壁开设有能够与限位块三47滑动连接的限位槽三48,夹持臂三46一端固定连接有复位弹簧三49,复位弹簧三49一端与转动台45内壁固定连接,固定件44工作时,切割平台2推动铸件一端靠近夹持臂三46,通过夹持臂三46外侧的弧形端二411使得铸件端部能够插入多个夹持臂三46内壁,铸件插入夹持臂三46内壁后,铸件推动多个夹持臂三46向转动台45外侧滑动,夹持臂三46带动限位块三47沿着限位槽三48内壁滑动,同时夹持臂三46拉伸复位弹簧三49,复位弹簧三49处于拉伸状态时对夹持臂三46产生向转动台45内侧移动的拉力,从而使得四个夹持臂三46相互配合对铸件一端外侧进行夹持固定。
37.实施例二
38.如图10-11,在本实施例二中,其他结构不变,与实施例一不同的是封闭件36包括
与移动盒30开口处两端滑动连接的挡板312,移动盒30内壁设有能够与挡板312滑动连接的封闭槽313,挡板312一侧固定连接有压缩弹簧一315,压缩弹簧一315一端与移动盒30内壁固定连接,挡板312上方内壁滑动连接有卡块316,卡块316一侧设置有斜型端319,卡块316下方固定连接有压缩弹簧二317,移动盒30内壁开设有能够与卡块316卡接的卡槽318,当封闭件36控制移动盒30开口打开时,操作者通过卡块316拉动两个挡板312分离,并推动挡板312沿着封闭槽313内壁滑动,挡板312挤压压缩弹簧一315,当卡块316移动至移动盒30一侧内壁时,卡块316的斜型端319与移动盒30内壁相互挤压,从而使得卡块316沿着挡板312内壁滑动并挤压压缩弹簧二317,当卡块316移动至卡槽318的对应位置后,压缩弹簧二317推动卡块316沿着移动盒30内壁滑动,从而使得卡块316与卡槽318卡接以配合将移动盒30的开口处打开,当需要对移动盒30的开口处进行封闭时,操作者按压卡块316,卡块316沿着挡板312内壁滑动并挤压压缩弹簧二317,当卡块316与卡槽318解除卡接状态后,处于压缩状态的复位弹簧一38推动挡板312沿着封闭槽313内壁滑动,从而使得移动盒30两侧的挡板312相互靠近以配合对移动盒30开口进行封闭
39.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
40.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1