一种玄武岩纤维复合管定向抛光装置及方法与流程
1.本发明涉及玄武岩纤维复合管加工技术领域,尤其涉及一种玄武岩纤维复合管定向抛光装置及方法。
背景技术:
2.玄武岩纤维复合管输初步生产完成后,管体两侧端面存在一定的毛刺,若是直接通过切割机将玄武岩纤维复合管侧端的较长一段切割掉,不仅浪费了较多的玄武岩纤维复合管,而且截去较长一端管体,可能导致管体长度不达标。若是切割的管体长度较短,切割机不易操作。
3.而对玄武岩纤维复合管侧端进行抛光时,在传输带上传输的玄武岩纤维复合管本身未“摆正”,在抛光前需要对传输带上的玄武岩纤维复合管进行“摆正”,而且抛光时对玄武岩纤维复合管侧端震动影响较大,若是“摆正”后玄武岩纤维复合管固定的位置距离其侧端较远,抛光误差就会较大。
4.综上,如何对传输带上的玄武岩纤维复合管进行快速精准“摆正”、固定夹持,并对玄武岩纤维复合管侧端进行稳定、精准的抛光,成为需要解决的问题。
技术实现要素:
5.本发明要解决的技术问题是提供一种玄武岩纤维复合管定向抛光装置及方法,从而对传输带上的玄武岩纤维复合管进行快速精准“摆正”、固定夹持,并对玄武岩纤维复合管侧端进行稳定、精准的抛光。
6.为解决上述技术问题,本发明是通过以下技术方案实现的:本发明提供一种玄武岩纤维复合管定向抛光装置,包括用于定向传输玄武岩纤维复合管的传动支撑带,传动支撑带的宽度尺寸小于玄武岩纤维复合管的长度尺寸,玄武岩纤维复合管侧端的上方位置、下方位置都设置有一组斜位夹持组件,斜位夹持组件包括定向移动杆以及滑动安装在定向移动杆上的直线电机,直线电机朝向玄武岩纤维复合管的方位安装有气缸组件,气缸组件包括推进轴杆以及安装在推进轴杆末端位置的夹持板。玄武岩纤维复合管同侧端位置的所有气缸组件通过气动管路连接同一气体源,气体源向所有气缸组件同步传输同等压力的气源,气体源设置有减压阀。上侧位置的两个斜位夹持组件之间的区域配置有光电距离传感模块,光电距离传感模块包括若干无间隙排列的光电探头。传动支撑带两侧方位都配置有横移驱动装置,横移驱动装置输出侧连接抛光电机,抛光电机输出侧设置旋转轴杆,旋转轴杆连接抛光轮以及位于抛光轮外侧位置的轴承套,轴承套外围固定安装滑移套筒,滑移套筒插接在玄武岩纤维复合管侧端的管腔位置处。
7.作为本发明中定向抛光装置的一种优选技术方案:上侧位置两个斜位夹持组件、下侧位置两个斜位夹持组件之间都固定安装有一连接平板,直线电机与连接平板固定连接,光电距离传感模块安装在上侧位置连接平板的中间位置。
8.作为本发明中定向抛光装置的一种优选技术方案:处于初始位置的同一竖直方向
上的两个夹持板之间的距离大于玄武岩纤维复合管的管体外径尺寸。
9.作为本发明中定向抛光装置的一种优选技术方案:相同高度位置的两个斜位夹持组件之间的夹角角度大于45
°
。
10.作为本发明中定向抛光装置的一种优选技术方案:旋转轴杆环侧设置固定盘,抛光轮包括安装内环板、抛光外环板,安装内环板与固定盘固定连接。其中,抛光外环板的外径尺寸大于玄武岩纤维复合管的外径尺寸。
11.作为本发明中定向抛光装置的一种优选技术方案:轴承套包括内轴承环、外轴承环,旋转轴杆与轴承套的内轴承环固定连接,滑移套筒与轴承套的外轴承环固定连接。
12.作为本发明中定向抛光装置的一种优选技术方案:轴承套侧端开设轴端螺纹孔,滑移套筒侧端开设螺纹通孔,螺纹通孔、轴端螺纹孔位置处安装有轴线螺栓。
13.本发明提供一种玄武岩纤维复合管定向抛光方法,包括以下步骤:㈠玄武岩纤维复合管端部夹持:传动支撑带带动玄武岩纤维复合管前进,当任意一个光电探头传感检测到玄武岩纤维复合管任意一端进入光电探头的竖直传感检测范围且光电探头传感检测到的距离不大于系统预设的“进入夹持距离”时,当前侧端的上侧位置两个气缸组件、下侧位置两个气缸组件同时动作,将玄武岩纤维复合管当前侧端定位夹持。玄武岩纤维复合管另一侧端位置的任意光电探头传感检测与玄武岩纤维复合管的距离,与“进入夹持距离”对比判断,通过玄武岩纤维复合管另一侧端位置的气缸组件完成对玄武岩纤维复合管另一侧端的定位夹持。
14.㈡侧端寻位:光电距离传感模块的若干光电探头向下对玄武岩纤维复合管进行距离检测,沿着玄武岩纤维复合管由中间向侧端的方向,分析判断出首个距离检测大于系统预设的“管端距离”的光电探头的位置,此位置的光电探头记作“抛光开始光电探头”。步骤㈠中玄武岩纤维复合管两侧端都完成定位夹持后,在步骤㈡侧端寻位时,玄武岩纤维复合管任一侧端位置的所有光电探头都未传感检测到大于系统预设的“管端距离”,则玄武岩纤维复合管当前侧端的气缸组件返程至初始位置,直线电机带动光电距离传感模块、气缸组件向朝向玄武岩纤维复合管侧端方位平移,直至出现一个光电探头传感检测的距离参数大于系统预设的“管端距离”。
15.㈢抛光定位:根据系统预设的抛光推进深度,以及各个光电探头之间排布的传感间距,分析判断抛光完成时玄武岩纤维复合管端面竖直方向上所正对的光电探头位置,此位置的光电探头记作“抛光完成光电探头”。
16.㈣玄武岩纤维复合管侧端抛光:横移驱动装置推进抛光电机朝向玄武岩纤维复合管方向推进,将滑移套筒插入玄武岩纤维复合管的管腔,当在步骤㈡中“抛光开始光电探头”传感检测到的距离信息不大于系统预设的“管端距离”时,抛光电机带动抛光轮转动,开始对玄武岩纤维复合管侧端开始抛光。当步骤㈢中的“抛光完成光电探头”传感检测到的距离为“抛光短距离”时,停止抛光,横移驱动装置带动抛光电机返程,滑移套筒脱离玄武岩纤维复合管,气缸组件带动夹持板返程至初始位置,传动支撑带继续向前传送抛光完成的玄武岩纤维复合管。
17.与现有的技术相比,本发明的有益效果是:本发明通过光电距离传感模块的检测配合以及斜位夹持组件对玄武岩纤维复合管的定位夹持,保证了运动过程中的玄武岩纤维复合管能够快速“预判”夹持,并能够稳固、
精准的对玄武岩纤维复合管侧端面进行线性化、定位化的抛光,避免了玄武岩纤维复合管侧端在抛光过程中受到抛光震动影响所导致的抛光误差变大现象。
附图说明
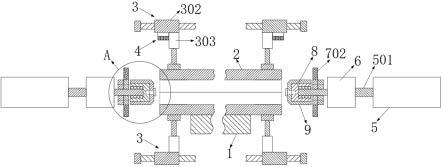
18.图1为本发明装置的整体结构示意图。
19.图2为图1中a处局部放大的结构示意图。
20.图3为本发明中抛光电机、抛光轮、轴承套、滑移套筒的结构示意图。
21.图4为本发明中横移驱动装置推动轴承套、滑移套筒插入玄武岩纤维复合管侧端管腔中的示意图。
22.图5为本发明中玄武岩纤维复合管进行预判定位夹持的结构示意图。
23.图6为本发明中玄武岩纤维复合管抛光时光电探头进行配合传感检测的示意图。
24.附图标记说明:1-传动支撑带;2-玄武岩纤维复合管,201-竖向对称面;3-斜位夹持组件,301-定向移动杆,302-直线电机,303-气缸组件,304-推进轴杆,305-夹持板,306-连接平板;4-光电距离传感模块,401-光电探头;5-横移驱动装置,501-横移轴杆;6-抛光电机,601-旋转轴杆,602-固定盘;7-抛光轮,701-安装内环板,702-抛光外环板;8-轴承套,801-轴端螺纹孔;9-滑移套筒,901-螺纹通孔;10-轴线螺栓;11-气动管路;12-气体源;13-减压阀。
具体实施方式
25.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
26.实施例一请参阅图1,传动支撑带1定向传输玄武岩纤维复合管2,定向传输玄武岩纤维复合管2的长度尺寸大于传动支撑带1的宽度尺寸,玄武岩纤维复合管2露出于传动支撑带1两侧。在玄武岩纤维复合管2侧端的上方位置、下方位置都设置有一组斜位夹持组件3(结合图5)。斜位夹持组件3包括定向移动杆301、直线电机302、气缸组件303,直线电机302滑动安装在定向移动杆301上。横移驱动装置5位于传动支撑带1两侧方位,横移驱动装置5的横移轴杆末端安装了抛光电机6,抛光电机6输出侧设置旋转轴杆601,旋转轴杆601连接抛光轮7以及位于抛光轮7外侧位置的轴承套8,轴承套8外围固定安装滑移套筒9。
27.请参阅图2、图3,固定盘602固定设置在旋转轴杆601环侧位置,抛光轮7固定连接在固定盘602外侧位置,抛光轮7包括安装内环板701、抛光外环板702,另外,抛光外环板702的外径尺寸大于玄武岩纤维复合管2的外径尺寸。轴承套8包括内轴承环、外轴承环,旋转轴杆601与轴承套8的内轴承环固定连接,滑移套筒9与轴承套8的外轴承环固定连接。轴承套8侧端开设轴端螺纹孔801,滑移套筒9侧端开设螺纹通孔901,轴线螺栓10安装在螺纹通孔901、轴端螺纹孔801位置处。
28.请参阅图4,斜位夹持组件3夹持住玄武岩纤维复合管2后,横移驱动装置5通过横移轴杆501推动抛光电机6、滑移套筒9横向移动,滑移套筒9插接在玄武岩纤维复合管2侧端的管腔位置处。
29.请参阅图5,上方位置的一组斜位夹持组件3之间还安装了光电距离传感模块4。连接平板306与直线电机302固定连接,连接在同一连接平板306的两个斜位夹持组件3之间的夹角角度大于45
°
,光电距离传感模块4位于上方位置连接平板306的中间位置并且竖直朝下进行探测,气缸组件303输出端设置了推进轴杆304,推进轴杆304末端安装了夹持板305,处于初始位置的同一竖直方向上的两个夹持板305之间的距离大于玄武岩纤维复合管2的管体外径尺寸。玄武岩纤维复合管2同侧端位置的所有气缸组件303通过气动管路11连接同一气体源12,气体源12向所有气缸组件303同步传输同等压力的气源,也就是同侧端位置的上下四个气缸组件303受到的气动驱动力相同,从而同步完成推进、返程动作,气体源12设置有减压阀13,当玄武岩纤维复合管2的外径过大时,气缸组件303驱动夹持板305进行动作时,过多的气压能够释放掉,不会对玄武岩纤维复合管2形成过度挤压损伤。
30.请参阅图6,光电距离传感模块4设置了多个紧密排布的光电探头401,光电探头401对玄武岩纤维复合管2、抛光外环板702的距离进行传感探测。
31.实施例二本发明涉及一种玄武岩纤维复合管2定向抛光方法,具体内容如下:环节一.玄武岩纤维复合管2端部夹持传动支撑带1带动玄武岩纤维复合管2前进,当任意一个光电探头401传感检测到玄武岩纤维复合管2任意一端进入光电探头401的竖直传感检测范围且光电探头401传感检测到的距离不大于系统(“系统”指现有的由单片机或工业计算机所组成的控制系统)预设的“进入夹持距离”时(当(玄武岩纤维)玄武岩纤维复合管2的竖向对称面201进入初始位置夹持板305的夹持范围时,光电探头401所传感检测到距离就不大于“进入夹持距离”,如图5中的探测距离“l”),当前侧端的上侧位置两个气缸组件303、下侧位置两个气缸组件303同时动作,将玄武岩纤维复合管2当前侧端定位夹持。玄武岩纤维复合管2另一侧端位置的任意光电探头401传感检测与玄武岩纤维复合管2的距离,与“进入夹持距离”对比判断,通过玄武岩纤维复合管2另一侧端位置的气缸组件303完成对玄武岩纤维复合管2另一侧端的定位夹持。
32.环节二.玄武岩纤维复合管2侧端寻位光电距离传感模块4的若干光电探头401向下对玄武岩纤维复合管2进行距离检测,沿着玄武岩纤维复合管2由中间向侧端的方向,分析判断出首个距离检测大于系统预设的“管端距离”(“管端距离”是光电探头与玄武岩纤维复合管2最高点之间的距离,如图4中的距离“h”)的光电探头401的位置,此位置的光电探头401记作“抛光开始光电探头”。环节一中玄武岩纤维复合管2两侧端都完成定位夹持后,在环节二中侧端寻位时,玄武岩纤维复合管2任一侧端位置的所有光电探头401都未传感检测到大于系统预设的“管端距离”,则玄武岩纤维复合管2当前侧端的气缸组件303返程至初始位置,直线电机302带动光电距离传感模块4、气缸组件303向朝向玄武岩纤维复合管2侧端方位平移,直至出现一个光电探头401传感检测的距离参数大于系统预设的“管端距离”。
33.环节三.玄武岩纤维复合管2抛光定位根据系统预设的抛光推进深度(朝向玄武岩纤维复合管2方向抛光的深度),以及各个光电探头401之间排布的传感间距(光电探头竖直向下传感检测距离,相邻的光电探头401在设计安装时,存在一定间距。本发明中未采用类似ccd密集高精度的设计,首先是因为
要进行距离传感检测,其次是本发明中只需进行单向(横向)的分布设计,对精度的要求不用太高,精度太高,工业控制系统本身迟滞的反应深度也跟不上,而且本发明这样设计还能一定程度降低控制难度,也降低了器件的成本),分析判断抛光完成时玄武岩纤维复合管2端面竖直方向上所正对的光电探头401位置,此位置的光电探头401记作“抛光完成光电探头”。
34.环节四.玄武岩纤维复合管2侧端抛光横移驱动装置5推进抛光电机6朝向玄武岩纤维复合管2方向推进,将滑移套筒9插入玄武岩纤维复合管2的管腔,当在步骤㈡中“抛光开始光电探头”传感检测到的距离信息不大于系统预设的“管端距离”时,抛光电机6带动抛光轮7转动,开始对玄武岩纤维复合管2侧端开始抛光。当步骤㈢中的“抛光完成光电探头”传感检测到的距离为“抛光短距离”(“抛光短距离”是光电探头传感检测到抛光轮7时的距离,如图6中的距离“s”)时,停止抛光,横移驱动装置5带动抛光电机6返程,滑移套筒9脱离玄武岩纤维复合管2,气缸组件303带动夹持板305(如图5中夹持板305靠近气缸组件303时的位置)返程至初始位置,传动支撑带1继续向前传送抛光完成的玄武岩纤维复合管2。
35.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1