压铸机自动脱料机器人的制作方法
1.本实用新型属于拉链加工设备技术领域,尤其涉及压铸机自动脱料机器人。
背景技术:
2.拉链头是经模具一次压铸成型的,成型之后会形成多个拉链头压铸件及进料水口,需要将拉链头与进料水口分离开来,以取出可用的成品拉链头。为将拉链头压铸件及进料水口分离开,中国发明专利201210037133.7公开了一种全自动拉链头压铸件分料机及分料方法,其中,拉链头压铸件在离心桶回转中通过离心力的作用下将拉链头分离出来,并通过离心桶侧壁上的分离孔脱离出离心桶,再通过分料桶下侧壁上的排料漏斗排出到排料滑道上并得到成品拉链头。该全自动拉链头压铸件分料机及分料方法采用的是将拉链头压铸件在离心桶回转中通过离心力的作用下将拉链头分离出来,在分离过程中由于拉链头与拉链头之间、拉链头与离心桶之间会发生相互碰撞,导致工作时噪音过大且拉链头会产生磨损,且整体自动化程度不高,难以满足现有的“无人工厂”要求。
3.为此,提出压铸机自动脱料机器人,解决现有拉链头分离装置在工作时噪音过大、拉链头磨损以及自动化程度不高等问题。
技术实现要素:
4.本实用新型的目的在于提供压铸机自动脱料机器人,旨在解决所述背景技术中拉链头分离装置在工作时噪音过大、拉链头磨损以及自动化程度不高等问题。为实现所述目的,本实用新型采用的技术方案是:
5.压铸机自动脱料机器人,包括移料装置、分离装置以及控制箱,移料装置包括进料机械手以及出料机械手,分离装置包括机架以及安装在支架内部的定位机构与分离机构。
6.对上述方案的进一步描述,控制箱安装在分离装置一侧,进料机械手安装在控制箱上表面,且进料机械手为六轴机械手。
7.对上述方案的进一步描述,机架的中部固定安装定位板,所述定位板上表面设有与压铸件相对应的定位块与定位锥体,在定位板的下方设有排料漏斗将分离的拉链头排出。
8.进一步的,定位板的上方设有安装架,在安装架上固定安装有压紧气缸与分离气缸,压紧气缸的活塞末端设有压紧压铸件的套管,分离气缸的活塞末端固定有压板将固定在定位板上的压铸件分离。
9.更优的,压板与安装架之间设有定位导轨,进而使压板上下移动时不会产生偏移误差。
10.更优的,出料机械手通过悬臂板固定安装在安装架的侧边下方,出料机械手采用气缸上下移动以及通过气缸驱动抓取压铸件,且出料机械手的抓取末端设有感应压铸件的传感器,用于感应压铸件是否存在。
11.对上述方案的进一步描述,出料机械手的外侧支架上设有排料滑道,出料机械手
夹取压铸件之后将压铸件移动到排料滑道。
12.更优的,分离装置的底部以及侧边设有agv运输车。
13.更优的,分离装置的底部与agv运输车之间设有滚筒,分离装置的上部设有上盖。
14.与现有技术相比,本实用新型的有以下有益效果:
15.1、设有进料机械手、出料机械手以及agv运输车,进料机械手将拉链头压铸件放进分离装置,出料机械手将拉链头压铸件分离好进料水口放置在agv运输车,agv运输车存储并运输分离好的拉链头与进料水口,实现拉链头压铸件分离的全自动化运行,取代人工降低劳动力成本;
16.2、采用推动分离模式而非采用滚筒将拉链头分离出来,在分离过程中拉链头相互碰撞少、噪音低且不会产生磨损。
附图说明
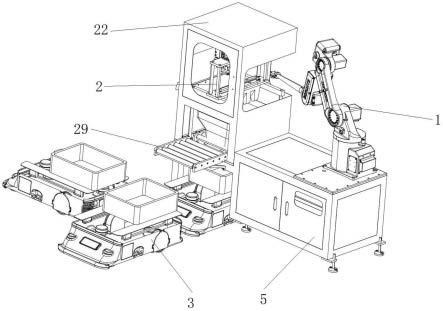
17.图1为本实用新型实施例提供的整体示意图;
18.图2为本实用新型实施例提供的分离装置前视图;
19.图3为本实用新型实施例提供的分离装置后视图;
20.图4为本实用新型实施例提供的定位板示意图;
21.图5为本实用新型实施例提供的部分结构示意图。
22.其中,图中各附图标记:
23.1、进料机械手;11、出料机械手;111、排料滑道;112、悬臂板;2、分离装置;21、机架;22、上盖;23、定位板;231、定位锥体;232、定位块;233、排料漏斗;24、压板;25、压紧气缸;251、套管;26、分离气缸;27、定位导轨;28、安装架;29、滚筒;3、agv运输车;4、压铸件;5、控制箱。
具体实施方式
24.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解得更加透彻全面。
25.下面结合具体实施方式对本专利的技术方案做进一步详细地说明。
26.如图1~5所示,本实用新型实施例提供了压铸机自动脱料机器人,包括移料装置、分离装置2以及控制箱5,其中移料装置包括进料机械手1以及出料机械手11,分离装置2包括机架21以及安装在支架内部的定位机构与分离机构。如图1所示,控制箱5安装在分离装置2一侧,进料机械手1安装在控制箱5上表面,且进料机械手1为六轴机械手。
27.如图2、3所示,分离装置2机架21的中部固定安装定位板23,如图4所示,定位板23上表面设有与压铸件4相对应的定位块232与定位锥体231,当进料机械手1将压铸件4移动到定位板23处时,压铸件4的底部与定位块232、定位锥体231定位放置,在定位板23的下方设有排料漏斗233将分离的拉链头排出。定位板23的上方设有安装架28,在安装架28上固定安装有压紧气缸25与分离气缸26,压紧气缸25的活塞末端设有压紧压铸件4的套管251,如图2所示,当压铸件4通过进料机械手1放置在定位板23之后,压紧气缸25的套管251会下移,
对准压铸件4的手柄将压铸件4固定。分离气缸26的活塞末端固定有压板24将固定在定位板23上的压铸件4分离。当然,压板24与安装架28之间还设有定位导轨27,进而使压板24上下移动时不会产生偏移误差,准确地将拉链头压掉脱落。出料机械手11通过悬臂板112固定安装在安装架28的侧边下方,出料机械手11采用气缸上下移动以及通过气缸驱动抓取压铸件4,且出料机械手11的抓取末端设有感应压铸件4的传感器,用于感应压铸件4是否存在。
28.如图1、5所示,出料机械手11的外侧支架上设有排料滑道111,出料机械手11夹取压铸件4之后将压铸件4移动到排料滑道111。分离装置2的底部以及侧边设有agv运输车3用于运输分离好的拉链头以及进料水口。分离装置2的底部与agv运输车3之间设有滚筒29,可切换至无需agv运输车3的模式。分离装置2的上部设有上盖22将分离装置2保护。
29.在实际使用时,压铸好的拉链头压铸件及进料水口通过进料机械手1放置在定位板23上,压紧气缸25工作,将套管251压在进料水口上固定拉链头压铸件及进料水口,然后分离气缸26工作,将压板24下移压到拉链头压铸件以使拉链头与进料水口分离,分离的拉链头会通过排料漏斗233掉入下方的agv运输车3或者滚筒29上的胶框内,若感应器感应到agv运输车3装满会自动排下一辆;分离的进料水口,待压紧气缸25上移后,出料机械手11下移并夹住进料水口的手柄,出料机械手11的末端传感器感应到抓到进料水口之后,会上移并旋转180度将进料水口移动到排料滑道111处,进料水口顺着排料滑道111掉入agv运输车3中。
30.综上所述,该压铸拉链头全自动化分离设备设有进料机械手1、出料机械手11以及agv运输车3,实现拉链头压铸件分离的全自动化运行,在分离过程中拉链头相互碰撞少、噪音低且不会产生磨损。
31.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,本文所使用的术语“上端”、“下端”、“左侧”、“右侧”、“前端”、“后端”以及类似的表达是参考附图的位置关系。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
33.以上实施方式仅用于说明本实用新型,而并非对本实用新型的限制,有关技术领域的普通技术人员,在不脱离本实用新型的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本实用新型的范畴,本实用新型的专利保护范围应由权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1